Устройство для программного управления позиционированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1213466
Авторы: Каплан, Судавцев, Хайрудинов
Текст
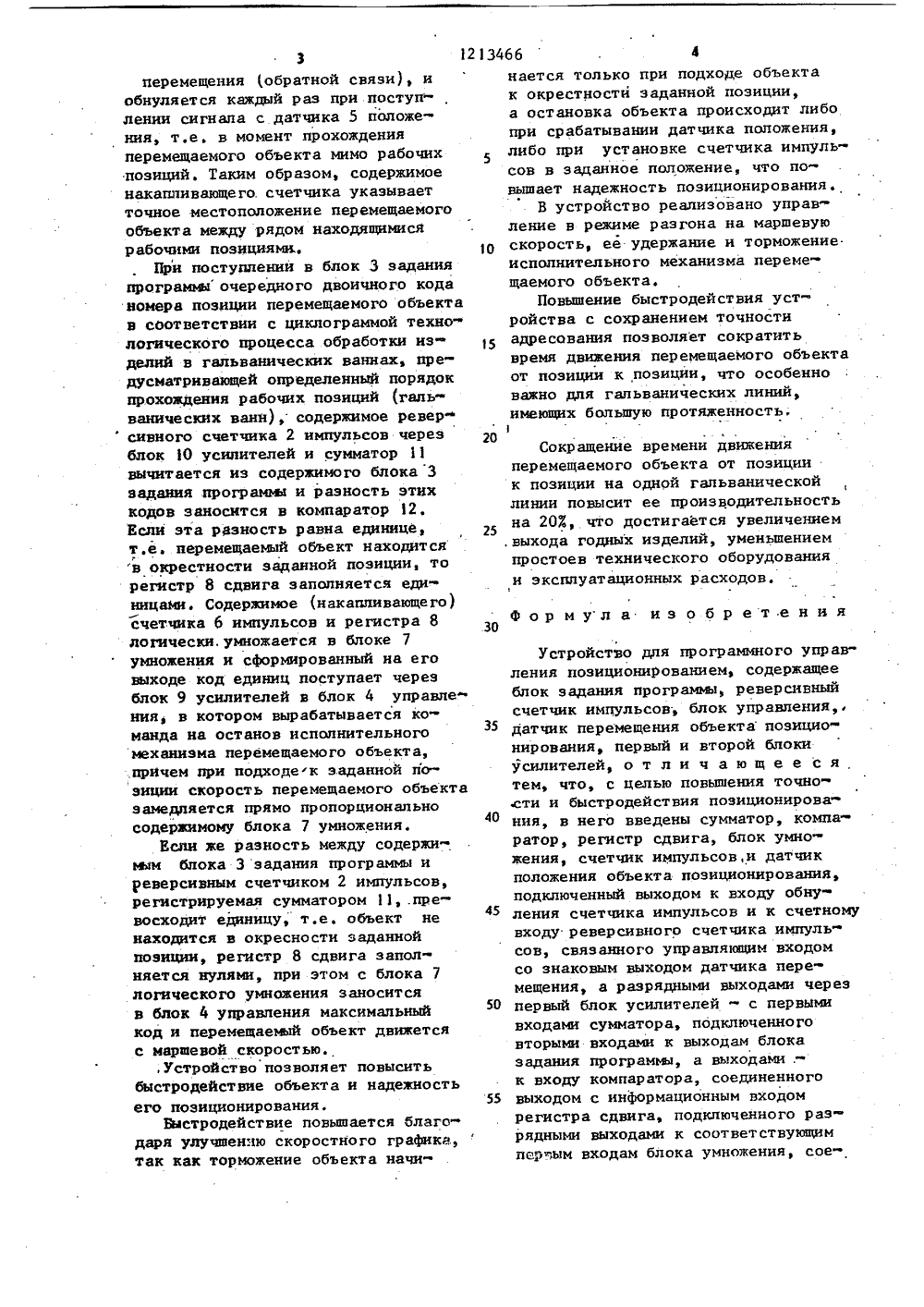
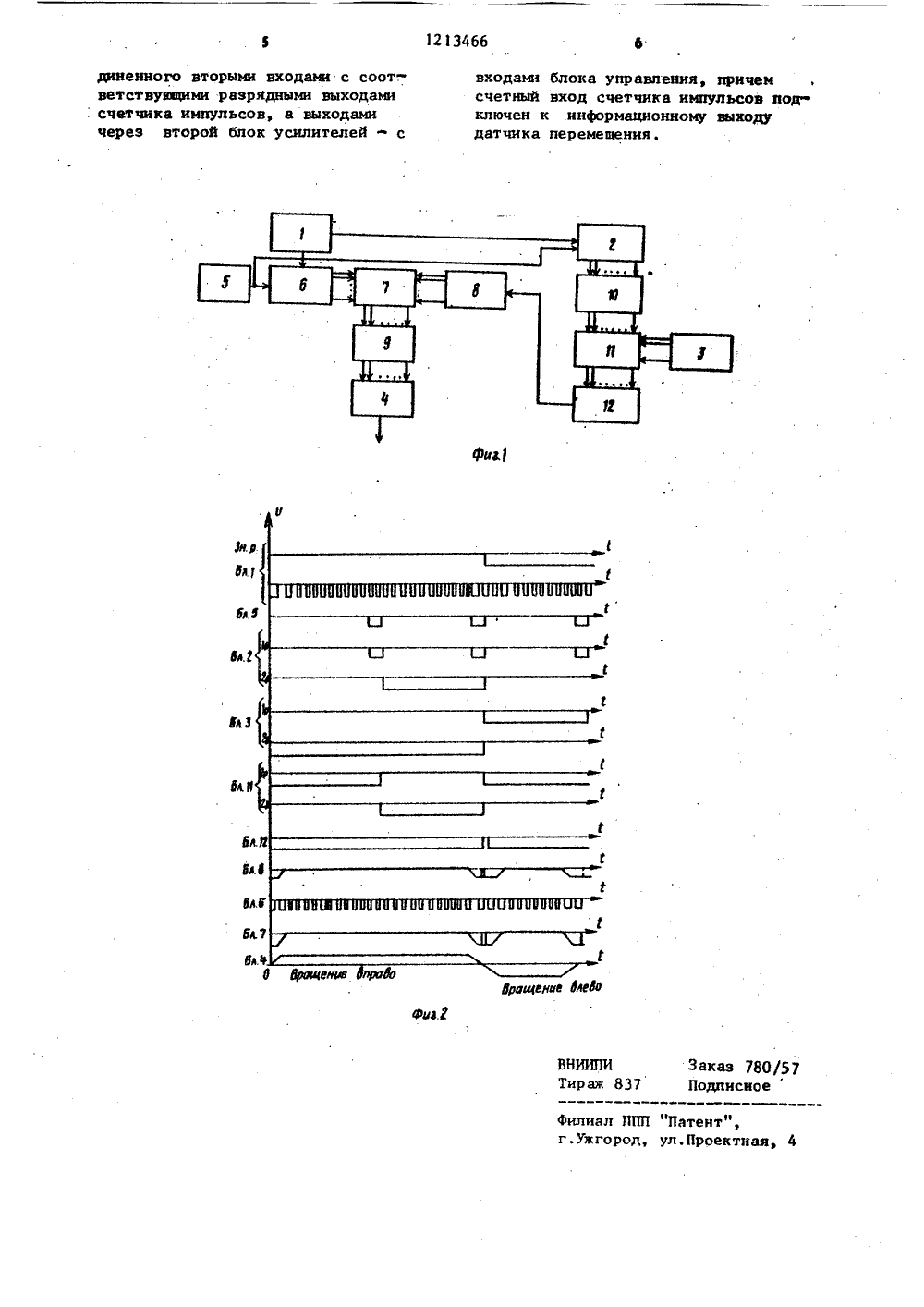
.ОЙИЦЪЕМЕСНИП,РЕСПУБЛИК А БРЕТЕН У о ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПЮ ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИЗО К АВТОРСКОМЪ( СВИДЕТЕЛ 21 3707928/24 24(46) 23.02.86. Бюл. У 7 (71) Всесоюзный проектно-конструкторский институт технологии электр технического производства(53) 621.503.55 (088.8) - (56) Авторское свидетельство СССР .У 658527, кл. 6 05 В 19/18, 1976.Авторское свидетельство СССР В 741233, кл. 6 05 В 19/18, 1977. . (54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО ; УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ (57) Изобретение относится к устро ствам программного управления и мо жет использоваться для управления автооператором гальванической. лини перемещающимся в ойределенной техн(2) 4 6 05 В 19/18 логической последовательности отодной рабочей позиции к другой. Уст-,ройство содержит датчик перемещенияобъекта позиционирования, реверсивный счетчик импульсов, блок заданияпрограммы, блок управления, датчикположения, объекта позиционирования,счетчик импульсов, блок умножения,регистр сдвига, первый и второйблоки усилителей, сумматор, компаратор. Это позволяет повысить точностьустройства, т;к. торможение объектаначинается только при подходе объекта к окрестности заданной позиции,а останов происходит либо при срабатывании датчика положения, либопри установке счетчика импульсовв заданное положение, и его быстродействие, т.к. в устройстве реали-зовано управление в режиме разгонана маршевую скорость. 2 ил.1213466Изобретение относится к устройствам программного управления иможет использоваться, в частности,для управления автооператором, гальванической линией, перемещающимсяв определенной технологическойпоСледовательности от одной рабочейпозиции к другой.На фиг.1 дана функциональная. схема устройства; на фиг,2 - временная диаграмма функционирования устройства.Устройство содержит датчик 1перемещения объекта позиционирования, реверсивный счетчик 2 импульсов, блок 3 задания программы, блок4 управления, датчик 5 положенияобъекта позиционирования, счетчик6 импульсрв, блок 7 умножения,регистр 8 сдвига, второй 9 и первый 10 блоки усилителей, сумматор11, компаратор 12.Датчик перемещения предназначендля выдачи .сигналов отработки исполнительным механизмом перемещаемого бб 1 екта; сигнала знакасигнала разного уровня "О" или "1",подаваемого на управляющий входреверсивного счетчика 2 импульсов,и сигнала, подаваемого на счетныйвход счетчика 6 импульсов.Реверсивный счетчик 2 импульсовпредназначен для счета сигналоврабочих позиций при перемещенииобъекта в прямом нли обратном направлениях.Блок 3 задания программы предназначен для хранения кода числаочередной позиции перемещения объекта.Блок 4 управления предназначендля отработки управлякщих сигналов,. поступающих на исполнительный механизм перемещаемого объекта,Блок 4 управления представляетсобой цифроаналоговый преобразователь с усилителем, подключеннымк его аналоговому выходу;. Непосредственно К усилителю подключаетсядвигатель постоянного тока,Датчик 5 положения объектапозиционирования предназначен длявыдачи сигнапов положения рабочихпозиций на установочный в "О" входсчетчика 6 импульсов.Счетчик 6 импульсов предназначендля счета сигналов отработки исполнительною механизма перемещаемогообъекта. 11Блок 7 умножения предназначендля выработки выходных сигналов,подаваемых через блок 9 усилителейв блок .управления, как функции логического умножения выходных сигналов (накопительного) счетчика 6импульсов и регистра 8,Регистр 8 сдвига предназначендля хранения двоичного кода уста10 новки позиции останова (заданнойпозиции) перемещаемого объекта.Сумматор 11 предназначен длявычитания входных сигналов, поступающих с выходов блока 3 задания15 программы и реверсивного счетчика2 импульсов и характеризукщих кодыдвоичных чисел, содержащихся в них,и выдачи выходных сигналов на компаратор 12.20 Компаратор 12 предназначен дляпреобразования сигнапов параллельного кода в последовательный коддвоичного числа и выдачи последнегов регистр 6.25 Устройство работает следующимобразом.В момент прохождения управляемого объекта мимо рабочих позицийдатчик 5 положения объекта позицио ,нирования вырабатывает импульс вреверсивный счетчик 2 импульсов.В зависимости от направления движения, определяемого знаковым разрядом датчика 1 перемещения (обрат 35ной связи), если уровень сигналадатчика равен логическому нулю, тореверсивный счетчик 2 импульсовработает в режиме "Сложение" и,наоборот, если уровень сигнала датчика 1 равен логической единице,то реверсивный счетчик 2 импульсовработает в режиме "Вычитание", посигналу датчика 5 положения, поступающему на счетный вход реверсивного счетчика 2 импульсов, со".держимое реверсивного счетчикавозрастает или убывает на единицу.Таким образом, считая, что объектначал перемещаться с начальной50позиции в прямом направлении, содержимое реверсивного счетчика 2 импульсов означает номер позиции, в окрестности которой находится объект вданный момент времени. Одновременно, при движении объек та в прямом или обратном направлении счетчик.6 импульсов накапиивает импульсы, вырабатываемые датчиком5 1 О 15 20 25 30 35 40 45 50 55 3 12перемещения обратной связи), иобнуляется каждый раз при поступ- ,лении сигнала с датчика 5 положения, т.е. в момент прохожденияперемещаемого объекта мимо рабочихпозиций. Таким образом, содержимоенакапливающего. счетчика указываетточное местоположение перемещаемогообъекта между рядом находящимисярабочими позициями.,При поступлении в блок 3 заданияпрограммй очередного двоичного коданомера позиции перемещаемого объектав соответствии с циклограммой технологического процесса обработки изделий в гальванических ваннах, предусматривающей определенный порядокпрохождения рабочих позиций (гальванических ванн), содержимое ревер"сивного счетчика 2 импульсов черезблок 10 усилителей и сумматор 11вычитается из содержимого блока 3задания программ и разность этихкодов заносится в компаратор 2,Если эта разность равна единице,т.е. перемещаемый объект находится"в окрестности заданной позиции, торегистр 8 сдвига заполняется единицами. Содержимое (накапливающего)счетчика 6 импульсов и регистра 8логически, умножается в блоке 7умножения и сформированный на еговыходе код единиц поступает черезблок 9 усилителей в блок 4 управления, в котором вырабатывается команда на останов исполнительногомеханизма перемещаемого объекта,.причем при подходек заданной позиции скорость перемещаемого объектазамедляется прямо пропорциональносодержимому блока 7 умножения.Если же разность между содержижм блока 3 задания программы иреверсивным счетчиком 2 импульсов,регистрируемая сумматором 11, .превосходит единицу, т.е. объект ненаходится в окресности заданнойпозиции, регистр 8 сдвига заполняется нулями, при этом с блока 7логического умножения заноситсяв блок 4 управления максимальныйкод и перемещаемай объект движетсяс маршевой скоростью,,Устройство позволяет повыситьбыстродействие объекта и надежностьего позиционирования,Быстродействие повышается благодаря улучшению скоростного графика,так как торможение объекта начи 13466 4 нается только при подходе объектак окрестности заданной позиции,а остановка объекта происходит либопри срабатывании датчика положения,либо при установке счетчика импульсов в заданное положение, что повышает надежность позиционирования.В устройство реализовано управление в режиме разгона на маршевуюскорость, ее удержание и торможение.исполнительного механизма перемещаемого объекта.Повышение быстродействия устройства с сохранением точностиадресавания позволяет сократитьвремя движения перемещаемого объектаот позиции к позиции, что особенноважно для гальванических линий,имеющих большую протяженность,1Сокращение времени движенияперемещаемого объекта от позициик позиции на одной гальваническойлинии повысит ее производительностьна 203, что достигается увеличениемвыхода годных изделий, уменьшениемпростоев технического оборудованияи эксплуатационных расходов,Ф ор м ул а и з о б р е т.е н и я Устройстзо для программного управ" ленив позиционированием, содержащее блок задания программы, реверсивный счетчик импульсов, блок управления,датчик перемещения объекта позиционирования, первый и второй блоки усилителей, о т л и ч а ю щ е е с я тем, что, с целью повышения точности и быстродействия позиционирования, в него введены сумматор, компа ратор, регистр сдвига, блок умножения, счетчик импульсов,и датчик положения объекта позиционирования, подключенный выходом к входу обнуления счетчика импульсов и к счетному входу реверсивного счетчика импульсов, связанного управляющим входом со знаковым выходом датчика перемещения, а разрядными выходами через первый блок усилителей - с первыми входами сумматора, подключенного вторыми входами к выходам блока задания программы, а выходами,- к входу компаратора, соединенного выходом с информационным входом регистра сдвига, подключенного разрядными выходами к соответствующим перчым входам блока умножения, сое1213466 лр енае Улей НИИПИкраж 837 Заказ 780/5Подписное диненного вторыми входами с соответствующими разрядными выходамисчетчика импульсов, а выходамичерез второй бпок усилителей с входами блока управления, причемсчетный вход счетчика импульсов подключен к информационному выходудатчика перемещения. Филиал ЛПП "Патент",г.ужгород, ул,Проектна
СмотретьЗаявка
3707928, 13.01.1984
ВСЕСОЮЗНЫЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ ИНСТИТУТ ТЕХНОЛОГИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОИЗВОДСТВА
ХАЙРУДИНОВ РАКИФ АГАЛЬДИНОВИЧ, СУДАВЦЕВ МИХАИЛ АНАТОЛЬЕВИЧ, КАПЛАН БОРИС МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: позиционированием, программного
Опубликовано: 23.02.1986
Код ссылки
<a href="https://patents.su/4-1213466-ustrojjstvo-dlya-programmnogo-upravleniya-pozicionirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления позиционированием</a>
Устройство для перемещения выдвижных радиоэлектронных блоков

Номер патента: 1309340
Опубликовано: 07.05.1987
Автор: Рамин
МПК: H05K 7/14
Метки: блоков, выдвижных, перемещения, радиоэлектронных
...перемещение 45блока 13 по направляющим 12 каркаса 1и сочленение вилки и розетки разъема17. После того, как поверхность скоса 10 входит в соприкосновение с рабочей поверхностью 15 дополнительного 50упора 14, поворот рычага 7 становитсяневозможным, поэтому вращение ручки 4управления прекращают,2Взаимное расположение рабочих поверхностей 15 и 16 дополнительного упора 14 относительно скоса 10 рычага 7 выбрано таким образом, что при взаимодействии скоса 10 с поверхностью 15 происходит полное сочленение ответных частей разъема 17, а при взаимодействии скоса 10 с поверхностью 16 - их полное расчленение. При извлечении блока 13 из каркаса 1 ручку 4 управления вращают в противоположную сторону, при этом рычаг 7 поворачивается по часовой стрелке,...
Вычислительный блок к устройствам для измерения геометрических размеров объектов

Номер патента: 765641
Опубликовано: 23.09.1980
Авторы: Костенко, Суздальцев
МПК: G01B 7/02
Метки: блок, вычислительный, геометрических, объектов, размеров, устройствам
...и на его первой выходной шине появляется сигнал, в результате чего происходит опрос первого конъ.онктора блока 5 конъюнкторов.Если фотодатчик ФД 1 ( на чертеже не показан) находится в сработанном состоянии (поверхность измеряемой фигуры не находится в зоне действия этого датчика), то срабатывает первый конъюнктор блока 5 конъюнкторов,и на выходе дизъюнктора появляется сигнал, который через инвертор 9 закрывает конъюнкторО.Второй импульс с распределителя 8 поступает по шине Г 1 на вход конъюнктора 10, но не проходит на вход счетчика 7.Третий импульс с распределителя 8 поступает по шине 1 на вход коммутатора 3, от чего с шины 1 снимается, а по шине 11 появляется сигнал, и все повторяется сначала.Если в зоне действия фотодатчиков (ФД - ФДп)...
Устройство для автоматического управления объектом

Номер патента: 1084741
Опубликовано: 07.04.1984
Авторы: Асатуров, Пермяков, Порозов
МПК: G05B 19/18, G05B 19/418
Метки: объектом
...с первыми входами блока загрузки ванн, . ЗОвыход третьего элемента И подключенк второму входу элемента ИЛИ, а первый и второй входы - к вторым входамблока загрузки ванн.Схема устройства обеспечивает ма- З 5лое энергопотребление, проста и надежна, так как, режим ее работы независит от изменения частоты переключения сигналов двоичного кода.На фиг.1 представлена блок"схемапредлагаемого устройствами на фиг.2 -функциональная схема блока сравнения,на фиг,З - блок-схема блока кодирования операции загрузкиф на фиг.4 -функциональная схема блока загрузкиванны, на фиг.5 - то же, блока .управления; на фиг. 6 - то же, реверсивного регистра адреса, на фиг.7 то же, блока отработки вертикальногоперемещения; на фиг.8 - то же, блока 5 Онабора...
Способ дистанционного контроля местоположения движущегося объекта

Номер патента: 303434
Опубликовано: 01.01.1971
Авторы: Беккер, Донецкий, Проектно
МПК: E21C 27/00
Метки: движущегося, дистанционного, местоположения, объекта
...Известны способы дистанционного контроля местоположения движущегося объекта.Предлагаемый способ отличается от известных тем, что в гидравлическом канале связи объекта с пультом создают импульсы давле нпя путем воздействия на геператор гидравлических импульсов магнитным полем постоянных магнитов, установленных на равных расстояниях по пути движения объекта, и регистрируьот переданные импульсы с помощью 10 гидравлического счетчика. Это позволяет повысить безопасность работы. На чертеже показано устроиство, реализующее предлагаемый способ. 15Способ заключается в следующем.В гидравлическом канале 1 связи (в качестве которого может использоваться магистраль орошеьия), связывающем машину 2 спультом 3, находящимся на штреке, создают...
Умножитель частоты следования импульсов

Номер патента: 687578
Опубликовано: 25.09.1979
Авторы: Брусницын, Глухов, Захарова
МПК: H03K 5/156
Метки: импульсов, следования, умножитель, частоты
...8 и на запуск основного и дополнительного генераторов 10 и 13 стробимпульсов при этом основной генератор 10 стробимпульсов выдает разрешение, а дополнительный генератор 13 запрет, причем сигнал запрета значительно короче сигнала разрешенияЕсли сумма периодов ныходных импульсов меньше периода умножаемых импульсов, то выходной умножаеьый импульс поступает на логический элемент И 11 но время дейстния строба разрешения, вырабатываемого основным генератором 10 стробимпульсов и, если в это время закончилось действие дополнительного строба, вырабатываемого дополнительным генератором 13 стробимпульсон, импульс сле 5 687578дует на нход сложения реверсивного счетчика 7 и увеличивает записанный в нем код на единицу,Реверсивный счетчик 7...
Предыдущий патент: Многоканальный измеритель временных интервалов
Следующий патент: Устройство для программного управления станком
Случайный патент: Ячеистый бункер для сыпучих материалов