Автомат для сортировки подшипников качения по времени выбега
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1185152
Автор: Алексеев
Текст
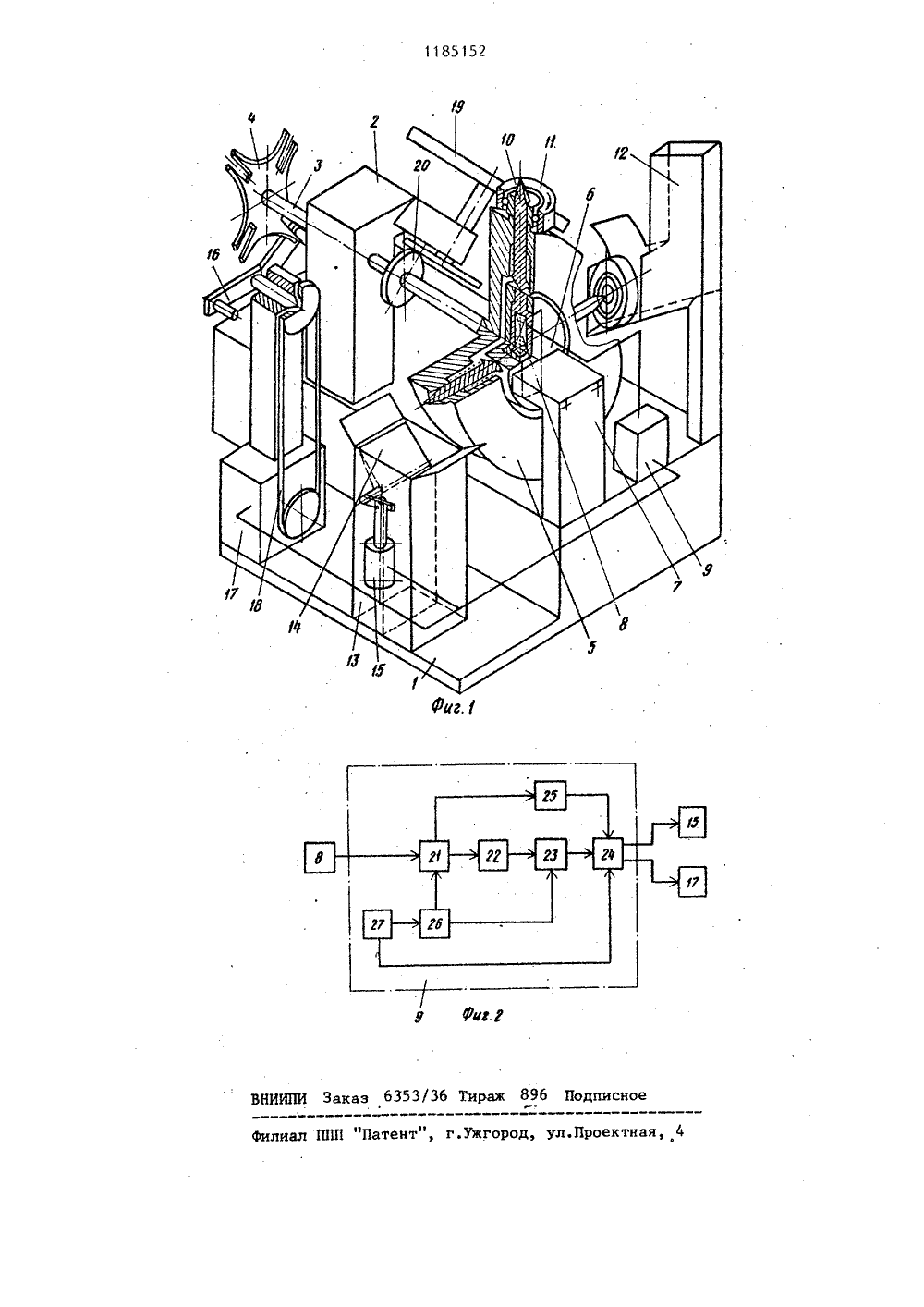
(54 С 01 М 13/04 ОПИСАНИЕ ИЗОБРЕТЕНИ 3,К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ащГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ 1 (21) 3710051/25-27(56) Авторское свидетельство СССРВ 1105769, кл. С 01 М 13/04,24.02.83.(54)(57) 1. АВТОМАТ ДЛЯ СОРТИРОВКИПОДШИПНИКОВ КАЧЕНИЯ ПО ВРЕМЕНИВЫБЕГА, содержащий корпус, приводс распределительным валом, загрузочный и приемный бункеры, механизмвращения наружного кольца контролируемого подшипника, измерительнуюстанцию в виде вибродатчика и электрического блока сравнения, подаватели, вращаемые распределительнымвалом, о т л и ч а ю щ и й с ятем, что, с целью повышения производительности, точности и надежности измерения, он снабжен механизмом прерывистого вращения распределительного вала, установленным, на стойке соосно с распределительным валом кулачком и охватывающей его обоймой, закрепленной на распределительном валу и кинематически связанной с механизмом вращения наружного кольца контролируемого подшипника, подаватели выполнены в виде подпружинецных к кулачку стержней с конус- ными головками и смонтированы в обойме равномерно по окружности в количестве, равном числу остановок распределительного вала за один оборот, а вибродатчик смонтирован в кулачке.2, Автомат по п. 1, о т л ич а ю щ и й с я тем, что механизм прерывистого вращения распределительного вала выполнен : в виде мальтийского креста.Изобретение относится к подшипниковой промышленности и можетбыть использовано для контроля подшипников по времени выбега.Пелью изобретения является повышение точности, надежности и производительности сортировки подшипников по измерению времени выбега.На фиг. 1 схематически изображенавтомат, общий вид; на фиг. 2 - 1 Оэлектрическая блок-схема сравненияавтомата.Автомат содержит корпус 1, опору 2 распределительного вала 3,на одном конце которого закрепленмальтийский крест механизма прерывания вращения распределительноговала 4, а второй конец выполнен ввиде обоймы 5.20Обойма 5 охватывает кулачок 6, который размещен на стойке 7 сооснос распределительным валом 3. В кулачке 6 установлен вибродатчик 8,электрически связанный с блоком 9сравнения.В обойме 5 установлены подаватели 10, выполненные в виде подпружиненных к кулачку 6 стержней с конусными головками, и смонтированы равномерно по окружности в количестве,равном числу остановок распределительноговала 3 за один оборот.Конусные головки подавателей 10центрируют контролируемые подшипники 11 по внутреннему кольцу, посту пающие из загрузочного бункера 12 на контроль и далее в приемныйбункер 13 с заслонкой 14, управляемой электромагнитом 15. Вращение кривошипа 16 мальтийского механизма 4 ф производится приводом 17 через ременную передачу 18. Привод 17 установлен на виброизолирующем основании корпуса 1.Вращение наружного кольца конт- ф 5 ролируемого подшипника 11 осущест вляется механизмом 19 вращения, имеющим кинематическую связь через фракционную передачу 20 с распределительным валом 3. 5 О Блок-схема сравнения автоматасодержит усилитель 21, блок 22 памяти,блок 23 времени, блок 24.коммутации,блок 25 стука, стабилизатор 26 напряжения, блок 27 питания.Автомат работает следующим образом,При включении привода 1 вращение передается через ременную передачу 18 на кривошип 16 мальтийскогокреста механизма 4, закрепленногона распределительном валу 3 так,что в момент "выстояего конуснаяголовка подавателя 10 направленав отверстие внутреннего кольца контролируемого подшипника 11, находящегося в лотке загрузочного бункера 12. В момент поворота мальтийского креста механизма 4 происходитповорот распределительного вала 3с обоймой 5.Подаватель 10 приходит в движениев радиальном направлении от неподвижного кулачка 6 и конусная головка его входит в отверстие внутреннего кольца контролируемого подшипника 11. Одновременно происходитперемещение контролируемого подшипника по окружности в верхнее положение над обоймой 5. Во время движения подшипника 11 из бункера 12в верхнее положение наружное кольцоего в определенный момент, соответствующий наибольшей скорости поворота распределительного вала 3,касается диска механизма 19 вращения.Диск механизма 19 вращения, приведенный во вращение от вала 3 черезфрикционную передачу 20, имеет максимальную скорость. Наружное кольцоконтролируемого подшипника 11 получает определенную скорость вращения,соответствующую скорости вращения,задаваемой техническими условиямина контроль времени выбега вращения подшипников. Контролируемыйподшипник 11 с вращающимся наружным кольцом поступает на позицию измерения в измерительную цепь электрического блока 9 сравнения после того, как кривошип 16 выйдет из зацепления с мальтийским крестом механизма 4. В этот момент подаватель10 торцом контактирует с вибродат- .чиком 8 и передает вибрацию и стуки вращающегося наружного кольцаконтролируемого подшипника 11 вибродатчику 8,После остановки распределительного вала включается регистрация сигнала с вибродатчика 8 в электрическом блоке 9 сравнения, настроенном предварительно с помощью образцового подшипника, имеющего минимальные дефекты вращения наружногозкольца 11, на некоторое калибровочное напряжение блока 22 памяти.В процессе измерения в блоке 22 памяти происходит накопление сигнала, поступающего с усилителя 21, и при превышении поступающего сигнала над калибровочным в блоке 23 времени вырабатывается сигнал на включение электромагнита 15, управляющего заслонкой 14 и, приемного бункера 13, что соответствует открытию отсека "Годные". При отсутствии поступающего сигнала при преждевременном прекращении поступления сигналов от вибродатчика, что свидетельствует об отсутствии вращения наружного кольца контролируемого подшипника 11, на электромагнит 15 сигнал не посту пает, и отсек "Годные" закрыт, а отсек "Брак" открыт.В случае возникновения стуков сигнал, поступающий с вибродатчика 8 и усилителя 21, превышает средний уровень вибрации образцового подшипника, блок 25 стуков вырабатывает сигнал, блокирующий электромагнит 15, и контролируемый подшипник поступает в отсек "Брак".Одновременно с подачей сигнала на электромагнит 15 электрический блок 9 сравнения подает сигнал на включение привода 17.1185152 4Кривошип 16 вновь входит в зацепление с мальтийским крестом механизма 4 прерывания вращения, ипроисходит следующий поворот распределительного.вала 3, во время кото"рого конусная головка подавателя10 выходит из отверстия внутреннегокольца проконтролированного подшипника 11, который падает в соответ ствующий отсек приемного бункера3. Следующий подаватель 10 в этовремя подает вновь контролируемыйподшипник 11 из лотка загрузочногобункера 2 на позицию измерения в 15 измерительную цепь электрическогоблока 9 сравнения,В момент подхода подавателя 10с контролируемым подшипником 11 напозицию измерения блока 9 сраба 2 п тывает микровыключатель, управляемый распределительным валом 3, приводящий блок сравнения в исходноеположениеПроисходит следующий цикл измере ния.Повышение точности и надежностиконтроля достигается за счет значительного снижения вибрации ишума подвижных частей механизмовавтомата. Повышение производительности контроля осуществляется засчет совмещения операций подготовки и осуществления контроля приполной их автоматизации.
СмотретьЗаявка
3710051, 12.03.1984
ПРЕДПРИЯТИЕ ПЯ Г-4517
АЛЕКСЕЕВ ВЯЧЕСЛАВ ИВАНОВИЧ
МПК / Метки
МПК: A61B 10/00, G01N 33/48
Метки: автомат, времени, выбега, качения, подшипников, сортировки
Опубликовано: 15.10.1985
Код ссылки
<a href="https://patents.su/4-1185152-avtomat-dlya-sortirovki-podshipnikov-kacheniya-po-vremeni-vybega.html" target="_blank" rel="follow" title="База патентов СССР">Автомат для сортировки подшипников качения по времени выбега</a>
Устройство для вращения длинномерных валов при нанесении гальванических покрытий

Номер патента: 1502666
Опубликовано: 23.08.1989
Автор: Корчмар
МПК: C25D 7/00
Метки: валов, вращения, гальванических, длинномерных, нанесении, покрытий
...эксцентрично относительно оси вращения вала 8. Один конец оси 11 установлен с возможностью вращения в валу 8. Другой конец оси 11 установленс возможностью вращения и возвратнопоступательного движения в выходномвалу 12, выполненном в виде резьбового шпинделя, и также эксцентрично расрасположен относительно оси вращения вала 12,Периферийная часть мембраны 9 за креплена между корпусом 13 механизма 4 и резьбовой втулки 14 вала 12,Корпуса 13 и 15 крепятся к стенке ванны 7 шайбой 16. К выходномувалу 12 деталь 6 прикрепляется с помощью рычажного прижима 7, 40Так на деталь 6 подается черезклемму 18, изготовленную за одно цепое с втулкой 14. Наружная поверхность выходного вала 12 и рычажногоприжима 17 покры;ы электростойким ма 45териалом 19,6...
Устройство для контроля согласованности вращения двух валов механизма

Номер патента: 667802
Опубликовано: 15.06.1979
Авторы: Джаракян, Едигарян, Марданян
МПК: G01B 7/30
Метки: валов, вращения, двух, механизма, согласованности
...уг ми на валах ме работы такого дискретностью п В нем такжеугла поворота тиопределяет достиэтом необходимо иблок уравниваниразователей угол -лами проверяемогтоту быстроходно механизма. Это ограничиваетвыявления высокочастотныхпогрешности механизма.Целью изобретения являетинформативности.Для этого устройство снаби О считываюшеи головкои, кинематически связанной с тихоходным валом и сопряженной с задающим элементом на быстроходном валу.На чертеже представлена кинематическая схема устройства.С входным валом проверяемого механизма 1 связан преобразователь угла поворота, в котором задающий элемент 2 установлен на быстроходном валу, механизмы и считывающая головка 3 - на его корпусе. Вторая считывающая головка 4 кинематически связана с...
Приспособление для суммирования скоростей вращения валов двух механизмов

Номер патента: 79965
Опубликовано: 01.01.1949
Автор: Уланов
Метки: валов, вращения, двух, механизмов, скоростей, суммирования
...которой тактке имеет торцовый зуо.Шесернпостоянно находтся в зацеплен;1 и с шестерней вала 4, вращающегося с углогои скоростью Если направления вращений валов противоположны, то замыкания контактов К, вызывае.ды аксиальпым смещением шестерни 3, олагодаря паличшо торцовыхн 1+ о) зубьев происходтт с частотой Е - , . Если направления вращений г,алов одинаковы, то астота замыка 1 шй контакта составляег) - . И2 - .Возврат шестерни 3 в первоначальное положение после замыканР 1 я контактов Осуществляется контактноп пруи(ИНОЙ, котора 5 также является и возвратной.Предмет изобретенияПриспособление для суммирования скоростей вращения валов двух механизмов путем преобразования суммарной скорости в частоту электрР 11 ескР 1 х импульсов, О тл и ч а ю...
Фотоэлектрическое устройство для сравнения скоростей вращения двух валов

Номер патента: 107893
Опубликовано: 01.01.1957
Автор: Костенко
МПК: G01P 3/68
Метки: валов, вращения, двух, скоростей, сравнения, фотоэлектрическое
...двигателя 1, укреплен Г-образный кронштейн 2, В центре вращения вала установлен вета - лампа 3 (автомипа . источник с обильного т )Свет, излучаемый лампой 3, собирается в узкий пучок микрообъективом 4 и направляется натрехгранную призму или зеркало 5,которое отклоняет луч на 90" инаправляет его на зрачок фотосопротивления б. Лампа 3 и фотосопротивление б получают питаниеот аккумуляторных батарей соответственно бв и 80 в через контактные щетки 7.На другом валу,валу испытуемогозакреплен оптичесгформе диска.Геометрическая ось вспомогательного двигателя 1 является продолжением геометрической осииспьп уемого генератора 8, Каквидно из чертежа, оптическийклин 9 пересекает световой луч,падающий на фотосопротивление,Не имея механической связи...
Устройство для стабилизации частоты вращения ведущего вала лентопротяжного механизма магнитофона

Номер патента: 1614032
Опубликовано: 15.12.1990
Автор: Юрасов
МПК: G11B 15/43
Метки: вала, ведущего, вращения, лентопротяжного, магнитофона, механизма, стабилизации, частоты
...скомпенсировать действие возмущающих воздействий с точностью до величины установившейся ошибки,В соответствии с алгоритмической схемой (фиг, 3) изображения по Лапласу ошибка О(р) Регулирования имеет вид: ГДс 1 И(р)=9/1(Р); В 2(Р); Вз(Р); ЧЧ 5(Р) - переДатгм ная функция разомкнутого устройства стабили".ации.При постоянных по величине отклонениях момента М на 1 рузки и напряжения О питания иэ формулы (1) получим выражение где Кр = К 1, К 2, Кз, К 5 коэффициент передачи разомкнутого устройства.Для устройства управления частотой 10 вращения ведущего вала лентопротяжногомеханизма магнитофона (ЛПМ) справедливо неравенство ТзТ 1Т 2Т 4,15где Т 1, Т 2, Тз и Т 1 - постоянные временисоответственно частотного дискриминатора,...
Предыдущий патент: Стенд для тарировки приводов
Следующий патент: Нагружающая муфта
Случайный патент: 386430