Формирователь опорных сигналов для управления синхронным электродвигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1061229
Автор: Иванов

Текст
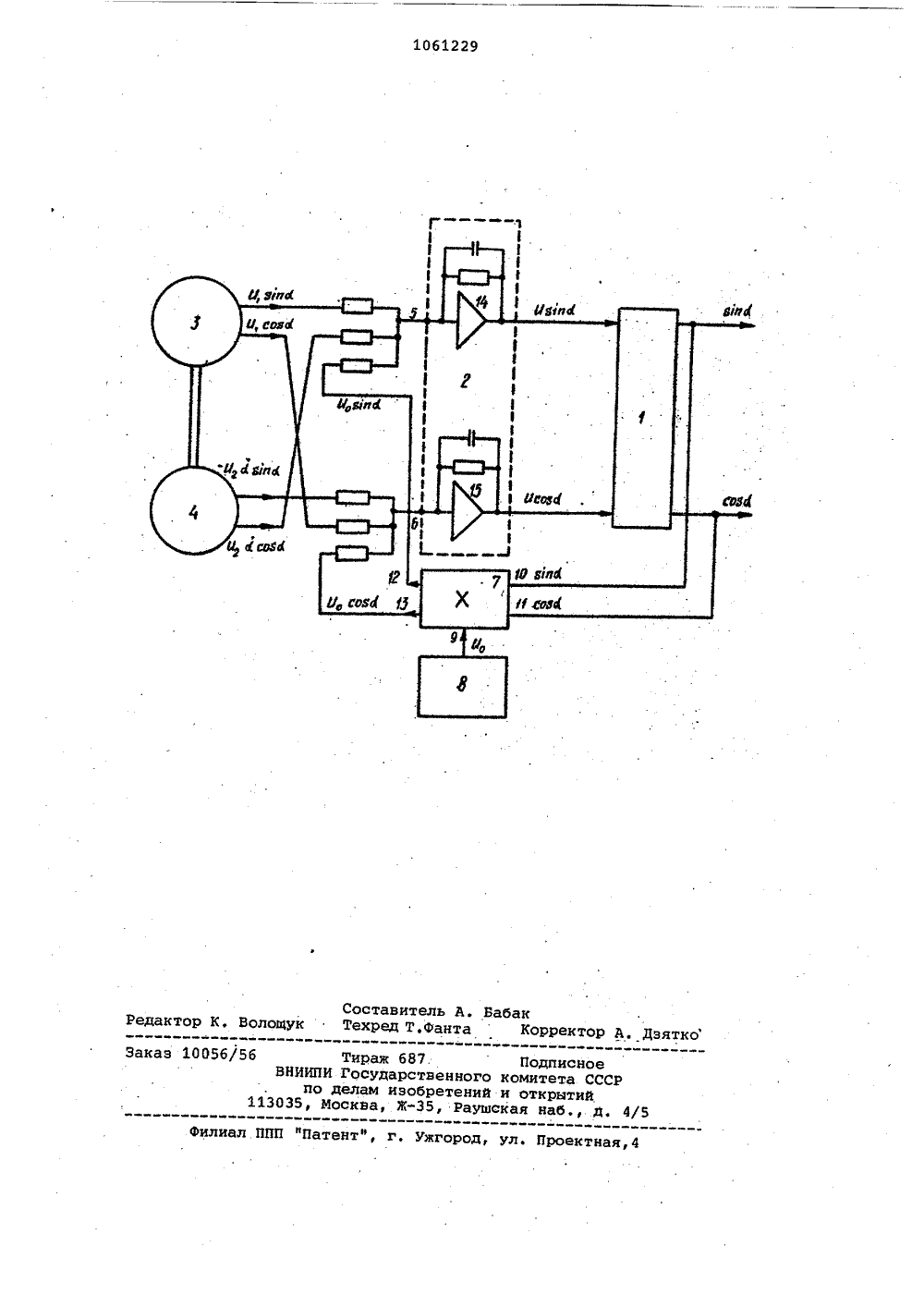
119) 01)СОЮЗ СОВЕТСКИХОРИЦИРПНЕЮИКРЕСПУБЛИК 3(59 Н 02 Р 5 34 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫтийОПИСАНИЕ ИЗОБРЕТЕНК;,(56) 1. Авторское свидетельство СССРМ 675568 кл. Н 02 Р 7/42, 1976,2. Авторское свидетельство СССРпо заявке М 2715850/24-07,кл. Н 02 Р 5/34, 1979.(54) (57) фоРМИРОВАТРЛЬ ОПОРНЬ 1 Х СИГВАЛОВ ДЛЯ УПРАВЛЕНИЯ СИНХРОННЬИ, ЭЛЕКТРОДВИГАТЕЛЕМ, содержащий фор-,мирователь нормированных опорныхнапряжений, блок апериодическихзвеньев, датчик углового положенияи синхронный генератор, ротор которого механически связан с роторомдатчика углового положения, причемвыход синусоидального сигнала последнего и выход косинусоидальногосигнала синхронного генератора соединены с первым суммирующим входом блока апериодических звеньев, а выходы косинусоидального и синусоидального сигналов соответственнодатчика углового йоложения и синхронного генераТора подключены ковторому суммирующему входу блокаапериодических звеньев, выходы которого соединены с входами формироВателя нормированных опорных напряжений, о т л и ч а ю щ и й с я тем,что, с целью повышения точности, внего введены блок умножителей и задатчик величины опорного напряжения,выход которого подключен к задающему входу блока умножителей, с первым и вторым входами которого соеди.нены соответственно выходы синусоидальных и косинусоидального сигналовформирователя нормированныхопорных напряжений; причем первый ивторой выходы блока умножителейсоединены соответственно с первым ивторым суммирующими входами блокаапериодических звеньев,Изобретение относится к электротехнике, в частности, к электроприводу переменного тока с синхронными,электродвигателями, и может быть испольэовано в электроприводах,управляющих скоростью и положением рабочих органов различных производственных механизмов, например, металлообрабатывающих станков,Известен Формирователь опорныхсигналов для управления синхроннымэлектродвигателем,. содержащий датчик углового положения, датчикэлектродвижущей силы двигателя иформирователь нормированных опорныхнапряжений, имеющий в своем составеблок апериодических звеньев. Выходыдатчиков углового положения и электродвижущей силы двигателя подключены ко входам блока апериодическихзвеньев 13.Недостатком этого устройстваявляется невысокая точность формирования опорных сигналов в связис тем, что на частотах вращениядвигателя, близких к нулю, опорныесигналы Формируются за счет сигналов датчика углового положения,апри частотах вращения, близких кноминальной, в основном за счетсигналов датчика электродвижущейсилы двигателя. При этом погрешности датчика углового положения целиком переходят в погрешности формирователя опорных сигналов в зонечастот вращения, располагаемых около нулевой, а при скоростях вращения близких к номинальной, ослабление действия погрешностей датчика бывает недостаточным. Кроме того,погрешности датчика электродвижущейсилы двигателя во многом определяютпогрешности формирователя опорныхсигналов и препятствуют получениюопорных сигналов синусоидальных поФорме, с равными амплитудами и междуфазовыми углами.Наиболее близким к предлагаемому является формирователь опорныхсигналов для управления синхроннымэлектродвигателем, входящий в элейтропривод, содержащий формировательнормированных опорных напряжений,блок апериодических звеньев, датчикуглового положения и синхронныйгенератор, ротор которого механичес.ки связан с ротором датчика углового положения, причем выход синусоидального сигнала последнего и выходкосинусоидального сигнала синхронного генератора соединены с первымсуммирующим входом блока апериодических звеньев, а выходы косинусоидального и синусоидального сигналовсоответственно датчика углового полокения и синхронного генератораподключены ко второму суммирующему входу блока апериодических звеньев, выходы которого соединены свходами Формирователя нормированныхопорных напряжений Г 23.Недостатком данного устройстваявляются большие погрешности Фор мирования опорных сигналов для управления синхронным электродвигателем, поскольку на вход блока ане-риодических звеньев поступают напряжения синхронного генератора, 10 который необходимо выполнять точнымпотому, что его напряжения используются также для формирования напряжения, пропорционального частоте вращения двигателя. В этих условиях погрешности формирования напряжений на выходах блока апериодических звеньев определяются в основном погрешностями датчика углового положения, так как Фильтрация его сиг.20 налов в блоке апериодических звеньев оказывается недостаточной по сравнению с напряжениями. синхронного генератора. Это приводит к тому, что погрешности формирования опор ных сигналов определяются в основном погрешностями датчика углового положения. 30 35 40 45 50 55 60 65 Цель изобретения - повышениеточности,Поставленная цель достигаетсятем, что в формирователь опорныхсигналов для управления синхроннымэлектродвигателем, содержащий формирователь нормированных опорных напряжений, блок апериодических звеньев, датчик углового положения и синхронный генератор, ротор которогомеханически связан с,ротором датчикауглового положения, причем выход синусоидального сигнала последнего ивыход косинусоидального сигнала синхронного генератора соединены спервым суммирующим входом блока апериодических звеньев, а выходы косинусоидального и синусоидального сигналов соответственно датчика угловогоположения и синхронного генератораподключены ко второму суммирующемувходу блока апериодических звеньев,выходы которого соединены с входамиформирователя нормированных опорныхнапряжений, введены блок умножителейи задатчик величины опорного напряжения, выход которого подключен к задающему входу блока умножителей, спервым и вторым входами которогосоединены соответственно выходы синусоидального и косинусоидальногосигналов формирователя нормированныхопорных напряжений, причем первый ивторой выходы блока умножителей соединены соответственно с первым ивторым суммирующими входами блокаапериодических звеньев,На чертеже представлена функцио-,нальная схема формирователя опорныхсигналов для управления синхронным электродвигателем.Формирователь опорных сигналов для управления синхронным электродвигателем содержит формирователь 1. нормированных опорных напряжений, блок 2 апериодических звеньев, датчик 3 углового положения и синхронный ге- нератор 4, ротор которого механическй связан с ротором датчика 3 угло- вого положения. Выход синусоидального сигнала датчика 3 углового положения и выход косинусоидального сигнала синхронного генератора 4 соединены с первым суммирующим входом 5 блока 2 апериодических звеньев, а выходы косинусоидального и синусоидального сигйалов соответственно датчика 3 углового положения и синхронного генератора 4 под.Ключены ко второму суммирующему входу б блока 2 апериодических звень. ев. Выходы последнего соединены с входами формирователя 1 нормированных опорных напряжений,Формирователь опорных сигналов для управления синхронным, электродвигателем содержит также блок 7 ум. ножителей и задатчик 8 величины опорного напряжения, выход которого подключен к задающему входу 9 блока 7 умножителей, с первым 10 и вторым 11 входами которого соединены соответственно выходы синусоидального и косинусоидального сигналов форми рователя нормированных опорных напряжений. Первый 12 и второй 13 выходы блока 7 умножителей, соответствующие его первому 10 и второму 11 входам, соединены соответственно с первым 5 и вторым б суммирующими входами блока 2 апериодических звеньев. Блок 2 апериодических звеньев содержит, например, два апериодических звена 14 и 15. Датчик 3 углового положения состоит, в данном случае, из синусно-косинусного вращающегося трансформатора,соединенного выходами с фазочувствительными выпрямителями. Выходы последних соединены с выходами датчика 3. углового положения. Формирователь. нормированных опорных напряжений содержит, например, Формирователь многофазных напряжений прямоугольной формы, выходы которого.подклю-. чены к управляющим цепям резистор-. ных синусной и косинусной.матриц.Устройство работает следующим образом.С выходов датчика 3 углового положения двухфазное напряжение 01 81 п о и О. сов Ы,где о - угол по" ворота ротора датчика 3 углового положения, поступает на первый и второй суммирующие входы блока 2 апериодических звеньев. С выходов синхронного генератора 4 двухфаэное напряжение - У оЬ 1 пЫ и П сСомпоступает на второй б и первый 5суммирующие входы блока .апериодических звеньев соответственно.При этом К= со - круговая частотавращения ротора датчика 3 угловогоположения для р = 1, где р - числопар полюсов, датчика углового положения.На первый 5 и второй б суммирую щие входы блока 2 апериодическихзвеньев поступает двухфазноенапряжение У о 1 п о 6 и У се 5 о с выходов.блока 7 умножителей. При определенном выборе резисторов и конденсато-.15 ров устройства двухфазное напряжение 09 в сС и Усо 5 о Формируется навыходе блока 2 апериодических звень.ев в основном за счет напряженийс выходов синхронного. генератора 4.Так как напряжения синхронного генератора 4 имеют стабильную величинуи практически идеальную синусоидальную Форму (генератор 4 выполняется прецизионным, то и напряжения 25 на выходе блока 2 апериодическихзвеньев оказываются стабильными повеличине и синусоидальными по форме.Соответственно на выходе формирователя нормированных опорных напряжений формируется двухфазное синусои-,дальное напряжение 51 пЫ и соьсС сединичной (нормированной), амплитудой.С помощью блока 7 умножителейформируются напряжения, которые пофазе совпадают с напряжениями от З 5 датчика 3 углового положения. Этопозволяет уменьшить величину Онапряжения, т.е. уменьшить роль датчика 3 углового положения в формировании напряжений на выходе апе риодических звеньев 14.и 15. Следовательно и погрешности датчика 3углового положения будут мало сказываться на точности. Роль датчика3 углового положения практически 45 сведена к заданию начального значения Выходных функций 51 О 8 и с 05 дкоторые допустимо определять с погрешностями. В дальнейшем, при появлении сигналов с синхронного гене ратора 4 сигналы с выходов блока7 умножителей, определяемые по выходным напряжениям блока 2 аперио,дических звеньев, выполняют роль. Применение предлагаемого йзобре-тения позволяет упростить техноло 1гию изготовления датчика угловогоположения и понизить его стоимость.Кроме того, повышение точности ха-.едактор К, В Заказ 10056/5 5 илиал.ППП "Патентф, г. Ужгород, ул. Проектная,4 Тираж 687 БНИИПИ Государствен по делам изобрет 035, Москва, Ж, Подписноео комитета СССй и открытийуюская наб , д.
СмотретьЗаявка
3428800, 28.04.1982
ПРЕДПРИЯТИЕ ПЯ В-8670
ИВАНОВ ЕВГЕНИЙ СЕРАФИМОВИЧ
МПК / Метки
МПК: H02P 5/34
Метки: опорных, сигналов, синхронным, формирователь, электродвигателем
Опубликовано: 15.12.1983
Код ссылки
<a href="https://patents.su/4-1061229-formirovatel-opornykh-signalov-dlya-upravleniya-sinkhronnym-ehlektrodvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Формирователь опорных сигналов для управления синхронным электродвигателем</a>
Угловой датчик положения

Номер патента: 659890
Опубликовано: 30.04.1979
Автор: Нестеров
МПК: G01B 7/24
Метки: датчик, положения, угловой
...датчик положения содержит систему возбуждения, магнитопровод с обмотками 1 и 2 возбуждения, датчик Холла 3, который укреплен на ферромагнитном сердечнике 4 со стороны, обращенной к системе возбуждения.Работа датчика положения заключается в следующем,Если ферромагнитный сердечник будет находиться в положении, когда он перемыкает северный и южный полюсы магнитной системы, то весь магнитный поток магнитной систсмь 1 будет идти через него, а следовательно, и через датчик Холла, при этом ЭДС Холла будет максимальна. Если ферромагнитный сердечник будет находиться в положении, перпендикулярном первому положению, то магнитные потоки системы возбуждения будут компенсироваться в ферромагнитном сердечнике, и ЭДС Холла будет равна нулю. В...
Устройство управления угловым положением объекта регулирования

Номер патента: 1117589
Опубликовано: 07.10.1984
Авторы: Вялов, Клюев, Трубецкой, Уславцев
МПК: G05B 19/18, G05B 19/418
Метки: объекта, положением, угловым
...регистр 28 и группу элементов И 29.Устройство работает следующимобразом.При включении устройства в регистрреверсивного счетчика 12 вписывается первоначальное значение угловогоположения объекта регулирования р ,относительно которого в дальнейшемпроизводится изменение его угловогоположения с помощью штурвалов ручного управления.Устройство управления угловым 55положением объекта представляет собой следящую систему,.начальное сос.тояние элементов устройства опреде 589 4ляется значениями кодов, выдаваемых с задатчика 16, преобразователя 8 угол - код и задатчика угла в соответствии с командами по входам 18 и 19 и принятой в системе обмена тактовой частотой.При отсутствии команды управления на входе 19 устройство работает в режиме программнот...
Датчик угловой скорости

Номер патента: 1296949
Опубликовано: 15.03.1987
Авторы: Альтшулер, Васюхно, Волков, Орлов, Попов, Филатов
Метки: датчик, скорости, угловой
...на соответствующие входы мультиплексора 3, код 101)1 - во второй управляющий сигнал, например 010, а код 11111 - в третий, например 001.Мультиплексор 3 может быть выполнен при этом в виде трех ключей, на входы которых поступают соответственно сигналы с выхода усилителя 2, первого и второго выходов источника 13, выходы которых объединены, а управляющие входы соединены соответственно с первой, второй и третьей выходными шинами дешифратора 17. Тогда, в течение первых тридцати циклов через мультиплексор 3 на сумматор 4 поступит выходное напряжение усилителя 2, в течение тридцать первого цикла - контрольное положительное нг:пряжение с первого выхода источника 13, а в течение тридцать второго - контрольное отрицательное напряжение, которое...
Датчик угловых перемещений

Номер патента: 1395816
Опубликовано: 15.05.1988
Авторы: Аржеухин, Гринченко, Шепиль
МПК: E21B 47/02
Метки: датчик, перемещений, угловых
...встречно, поэтому связь между любой из кольцевых н рамочных обмоток 5 и 6 при извлечении ротора отсутствует. При введении ротора 7 в статор сектора 8 и О, 9 и 11 оказывают противоположное влп яние на величину индуктивной связи между лобовыми участками однофазных рамочных обмоток 5 и 6 с кольцевыми обмотками 3 или 4.Токопроводящие основные и дополннтель/ ные немагнитные секторы 10,10, 1, 11 за счет вихревого эффекта нменьшают потокосцепление лежа щи з непосредственной близости к ним участков обмоток 5 и 6 с кольцевыми обмотками 3 или 4.Лобовые части оомоток 5 н 6 имеют под собой свой ряд чередующихся секторов ротора 7, которые, примыкая к кольцевой обмотке 3 или 4, увеличивают или уменьшают индуктивные связи между ними. Результирующая...
Способ регулирования датчика угловых перемещений

Номер патента: 1781672
Опубликовано: 15.12.1992
МПК: G01B 7/00, G05B 23/02
Метки: датчика, перемещений, угловых
...на фиг.2 - временные диаграммы; на фиг,З - схемы намотки фаз кольцевой и рамочной обмоток; на фиг,4 - характер влияния на выходную крййую погрешности датчика немагнитной пластины,Датчик угловых перемещений 1, установленссьсй без наружного корпуса, приводится во вращение электродвигателем 2 с постоянной скоростью вращения ротора 3,Скорость вращения двигателя 2 выбирается, во-первых, из условия обеспечения допустимой постоянной скорости вращения ротора для данного датчика, во-вторьсх,Мто- бы, например, период вращения (время одного оборота) для достаточной точностиизмерения превышал напряжения частоты "питэсаяхотя бы в 360 раз (в этом случаеточность измерения будет составлять 1 ,).При необходимости получения более 5 точной настройки...
Предыдущий патент: Электропривод постоянного тока
Следующий патент: Устройство для управления шаговым двигателем с дроблением шага
Случайный патент: Ограждение для ножевого вала разбивочной машины