Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
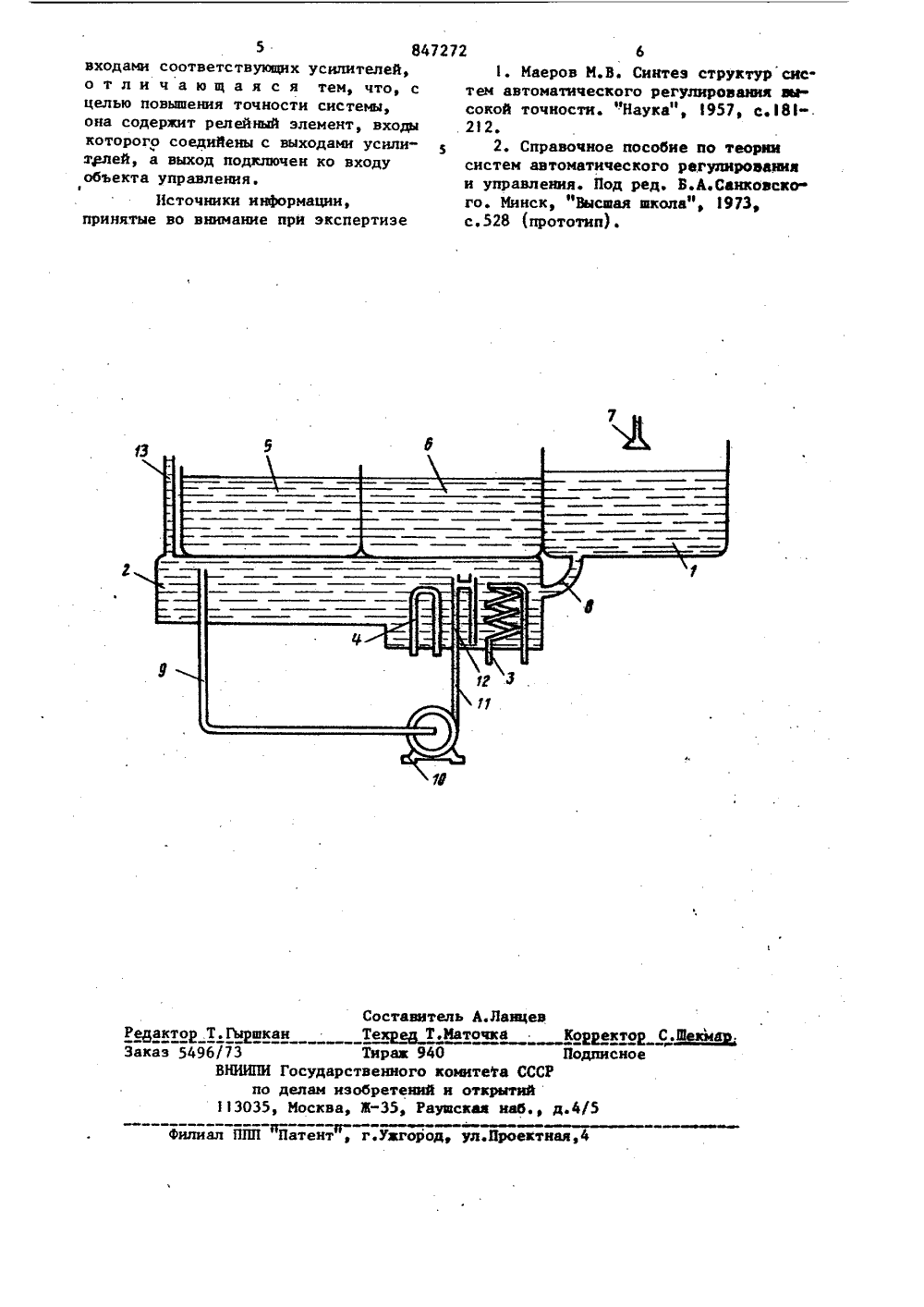
зобре тся к автомат может быть ис ения объектами яются в широняются условия ние относ авлению идля управлоторых ме ческому у пользован параметры ком днапа и изм внешней среды. Требуемое количе ния в этих условиях его от переменных па них возмущений дости организации в систем скользящего режима.тво регулироваи независимостьраметрсв и внешгается за счет ах регулироваии Известны релейные истемы автомая, в которых щий режим. Двирежиме не зави- араметровобъекк объекту внештичес обесп го регулированичивается скольз х в скользящем ситта стем эаклю ения инфор зации скол ни от меняющихсяни от приложенныхиих возмущений 1.Недостаток таких сиется в трудности изменеобходимой для органищего режима. Наиболее близкой по техническойсущности к предлагаемой является самонастраивающаяся система (СНС) с моделью, содержащая сумматоры, первыевходы которых соединены с соответст- Ввующими выходами модели объекта управления вторые входы - с соответствующими выходами объекта управления,а выходы - со входами соответствующих усилителей настройки, нелинейнойфункции и объекта, причем сигнал задания подается одновременно на входмодели и основного контура, а выходрелейного элемента и сигнал ошибкиосновного контура подключены на входнелинейной функции Г 2.Однако в указанной системе прибольших входных сигналах и широкомдиапазоне изменения коэффициента усиления системы возникает необходимостьв стабилизации алгоритма настройки,что приводит к малой точности система, при этом использование СНС сэталонной моделью и комбинированной3 8472настройкой приводит к усложнению системы. Кроме того, при широком диапазоне изменения параметров объекта неудается обеспечить требуемую степеньинвариантности к параметрическим воз 5мущениям, система весьма чувствительна к внешним возмущениям, действующим на объект регулирования,Цель изобретения - обеспечениескользящего режима в течение всего 10времени переходного процесса и инвариантности к параметрическим и внешним возмущениям и упрощение системырегулирования при доступности измерению всех фазовых координат объекта и 15к повышению точности системы.Эта цель достигается тем, что система управления содержит релейный элемент, входы которого соединены с выходами усилителей, а выход подключен 20ко входу объекта управления.На чертеже представлена предлага"емая схема управления для третьегопорядка.Система содержит модель 1, включающую последовательно соединенныеинерционные звенья 2 - 4, модулирующие свойства объекта, сумматоры 5- 7,на входы которых поданы фазовые координаты Х- Х, и объекта Х- Х, а 50Ф М"выходы, представляющие собой отклонения1, через усилители 8 - 1 О подключены ко входу релейного элемента11, последовательно соединенного собъектом регулирования, включающим 35инерционные звенья 12 и 13, При этомвходной сигнал (сигнал задания) поступает на вход модели, формируя жела"емые значения Х 1 " Х , фазовых координат объекта Х- Х40Система работает следующим образом. До подачи входного сигнала на мой + 45 дель 1 желаемые значения Х- Х, фазовых координат звеньев 2 - 4 равных нулю, следовательно, на вход релейного элемента 11 поступает суммарный нулевой сигнал и релейный элемент работает в скользящем режиме, После по 50 дачи входного сигнала в модели формируются желаемые значения Х" Х фазовых координат объекта, которые могут быть изменены. Текущие (истинные55 значения фазовых координат Х 4 - Х измеряются в объекте регулирования, В сумматорах 5 - 7 вычисляются отклонения 1 - , текущих значений фазовых координат Х- Х 5 от их желаемых значений Х- Х, т.е.Сигналы отклонений 1,- 1,з , усиленные в усилителях 8 - 10, поступают на вход релейного элемента 1. Поскольку на вход объекта регулирования не подключен входной сигнал, а подключен только выход релейного элемента, то выбором параметров усилителей 8 - 10 обеспечивают работу релейного элемента 11 при любом входном сигнале. Подачей входного сигнала только на вход модели и исключением главной обратной основного контура устраняются большие ошибки на входе объекта, а введением дополнительных сумматоров 8 и 9 обеспечива ется использование всех фазовых координат ф-"1 , что позволяет при любом входном сигнаЛе, имеющихся параметрах объекта и внешних возмущений, обеспечить практически нулевой сигнал на входе релейного элемента, т.е. обеспечить его работу в скользящем режиме.Предлагаемая система позволяет обеспечить независимость выходной координаты объекта Х от переменных параметров объекта и внешних возмущений, приложенных к объекту за счет того, что система автоматического регулирования всегда раоотает в скользящем режиме, строить высококачественные системы автоматического регулирования, инвариантныек переменным параметрам объекта и внешним возмущениям приложенным к объекту и может найти широкое применение для построения систем стабилизации и следящих систем, работающих в условиях меняющихся воздействий внешней среды, например, в системах управления электроприводом, тепловыми процессами, летательными аппаратами.формула изобретенияСистема управления, содержащая сумматоры, первые входы которых соединены с соответствующими выходами модели объекта управления, вторые входы - с соответствующими выходами объекта управления, а выходы - со847272 5входами соответствующих усилителей,о т л и ч а ю щ а я с я тем, что, сцелью повышения точности системы,она содержит релейный элемент, входыкоторого соедийены с выходамн усилизрлей, а выход подключен ко входуобъекта управления.тИсточники информации,принятые во внимание при экспертизе 61. Маеров М.В. Синтеэ структур систем автоматического регулирования вмсокой точности. "Наука", 957, с,81-. . 212.2. Справочное пособие по теории систем автоматического регулироаания и управления. Под ред. Б.А.Санковского. Минск, "Высшая школа"1973 с.528 (прототип).Составитель А.ЛаюТехЯЩ ТеИаточка евКорректор С.Яе еПодписноеССРий Редактор Т. 1 ЪщшЗаказ 5496/73 Тираж 940ВНИИПИ Государственного комитетапо делам изобретений и открыт113035, Москва, Ж, Раушская иаб Филиал ППП Патентг.ужгород, ул.Проектная
СмотретьЗаявка
2790838, 04.07.1979
КОММУНАРСКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙИНСТИТУТ
ЖИЛЯКОВ ВИКТОР ИВАНОВИЧ, САДОВОЙ АЛЕКСАНДР ВАЛЕНТИНОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки:
Опубликовано: 15.07.1981
Код ссылки
<a href="https://patents.su/3-847272-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для распознавания элементов сигнала

Номер патента: 468582
Опубликовано: 23.10.1983
Автор: Зелигер
МПК: H04L 1/02, H04L 27/156
Метки: распознавания, сигнала, элементов
...узла, причем выходы всех распознающих узлов через регистрирующую схему понключены к одному извходов запоминающего узла, вход онногоиз распознающих узлов через соответствуюшую ключевую схему подключен квыходу узла, выцеляюшего границы, авходы трех других распознаюших узловчерез соответствующие ключевые схемыпацключены к выходам узла, выцеляюшего границы, и узла, усредняюшего смешения, соответственно.На чертеже привенена блок-схемаустройства,Устройство цля распознавания элементов сигнала содержит узел, выделяющийграницы (УВГ) 1, узел,усренняющийсмешения границ 2, а также ключевыесхемы 3 - 6, распознаюшие узлы 710 регистрирующую схему 11, образукьшие многоинтервальный узел 12, запоминаюший узел 13, второй идентичныймногоинтервальный...
Устройство для исследования модели транспортной системы

Номер патента: 1117645
Опубликовано: 07.10.1984
Автор: Карасов
МПК: G06N 7/08
Метки: исследования, модели, системы, транспортной
...с нулевым входом триггера. 5 На чертеже показана блок-схемаустройства,645 4Устройство содержит второй дешифратор 1, группу элементов ( почислу параметров исследуемой тран"спортной системы ) ИЛИ 2, группуреверсивных счетчиков 3, триггер 4,генератор 5 потоков заявок, блок 6буферной памяти, коммутатор 7, модель 8 транспортной системы, статистический анализатор 9, блок 10 индикации, блок 1, памяти, первый дешифратор 12, счетчик 3, второйсумматор 14, умножитель 15, первыйсумматор 16, ключ 17, блок 18 дина"мической памяти, блок 19 сравнения,регистр 20 памяти, ключ 21, элементИЛИ 22, блок 23 формирования интервала времени, первый и второй элементы 24 и 25 задержки.Модель транспортной системы, аточнее структура имитатора транспортного...
Устройство для измерения амплитудных и фазовых искажений сигнала в нелинейных четырехполюсниках

Номер патента: 1132250
Опубликовано: 30.12.1984
Авторы: Бурцев, Вариводский, Кизевич, Чердынцев
МПК: G01R 23/20
Метки: амплитудных, искажений, нелинейных, сигнала, фазовых, четырехполюсниках
...напряжения соответственно, выход г енератора шума подключен ко второму входу сумматора.На чертеже приведена структурная схема предлагаемого устройства.Устройство содержит генератор 1 сигнала, генератор 2 шума, сумматор 3, исследуемый нелинейный четырехполюсник 4, первый полосовой фильтр 5, гетеродин. 6, первый перемножитель 7, второй полосовой фильтр 8, второй перемножитель 9, третий поло- совой фильтр 10, детектор 11 огибающей, фазовый детектор 12 р первый измеритель 13 напряжения и второй измеритель 14 напряжения, при этом генератор 1 сигнала подключен к первому входу первого перемножителя 7 непосредственно, а к первому входу второго перемножителя 9 - через последовательно соединенные сумматор 3, исследуемый нелинейный...
Чувствительный элемент датчика ускорений с частотным выходом

Номер патента: 678431
Опубликовано: 05.08.1979
Авторы: Крестьянинов, Михайлов, Смирнов
МПК: G01P 15/097
Метки: выходом, датчика, ускорений, частотным, чувствительный, элемент
...090 Подписное филиал ППП Патент ,Ужгород, ул.Проектн 4 ся от этого недостатка можно было бы,предложив выполнение упоров в подвижной-системе, однако, вследствие того,что рабочие деформации стержневогорезонатора невелики (3-5 мкм) в,рабочем диапазоне измерения, на современном уровне развития технологии 5невозможно получить зазоры достаточной площади и величиной 5-10 мкм,Создание сбОрных конструкций, обеспечивающих надежные зазоры подобныхразмеров, также исключительно сложная задача.Целью изобретения является расширение диапазона измерений, Для достижения этой цели в чувствительномэлементе пружинный подвес снабжен 15дополнительными плоскими пружинами,размещенными. между инерционной массой и основными пружинами подвеса,а в инерционной...
Фотоэлектрический преобразовательперемещения b фазовый сдвигсигнала

Номер патента: 830475
Опубликовано: 15.05.1981
Авторы: Кочетков, Махотин, Титов, Швед
МПК: G08C 9/06
Метки: преобразовательперемещения, сдвигсигнала, фазовый, фотоэлектрический
...измеряемому перемещению, и фазового сдвига опорного сигнала не содержащие паразитной динамической/составляющей. Следовательно в выходном сигнале преобразователя отсут 10 .ствует паразитная динамическая составляющая и преобразователь имеет повьппенную динамическую точность. 3Поставленная цель достигаетсятем, что в фотоэлектрический преобразователь перемещения в фазовыйсдвиг сигнала, содержащий фотоэлектрический растровый датчик, выходыкоторого соединены со входами дифференциальных усилителей, выходы которых соединены с первыми входамиумножителей, и генератор, введеныфазорасщепитель и вычитающее устройство, причем выход генераторасоединен со входом фазовращателя,выходы которого соединены со вторыми входами умножителей,...
Предыдущий патент: Устройство для управления подачейметаллорежущего ctahka
Следующий патент: Самонастраивающийся регулятор
Случайный патент: Скребковый конвейер