Способ управления процессом загрузки грейфера и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
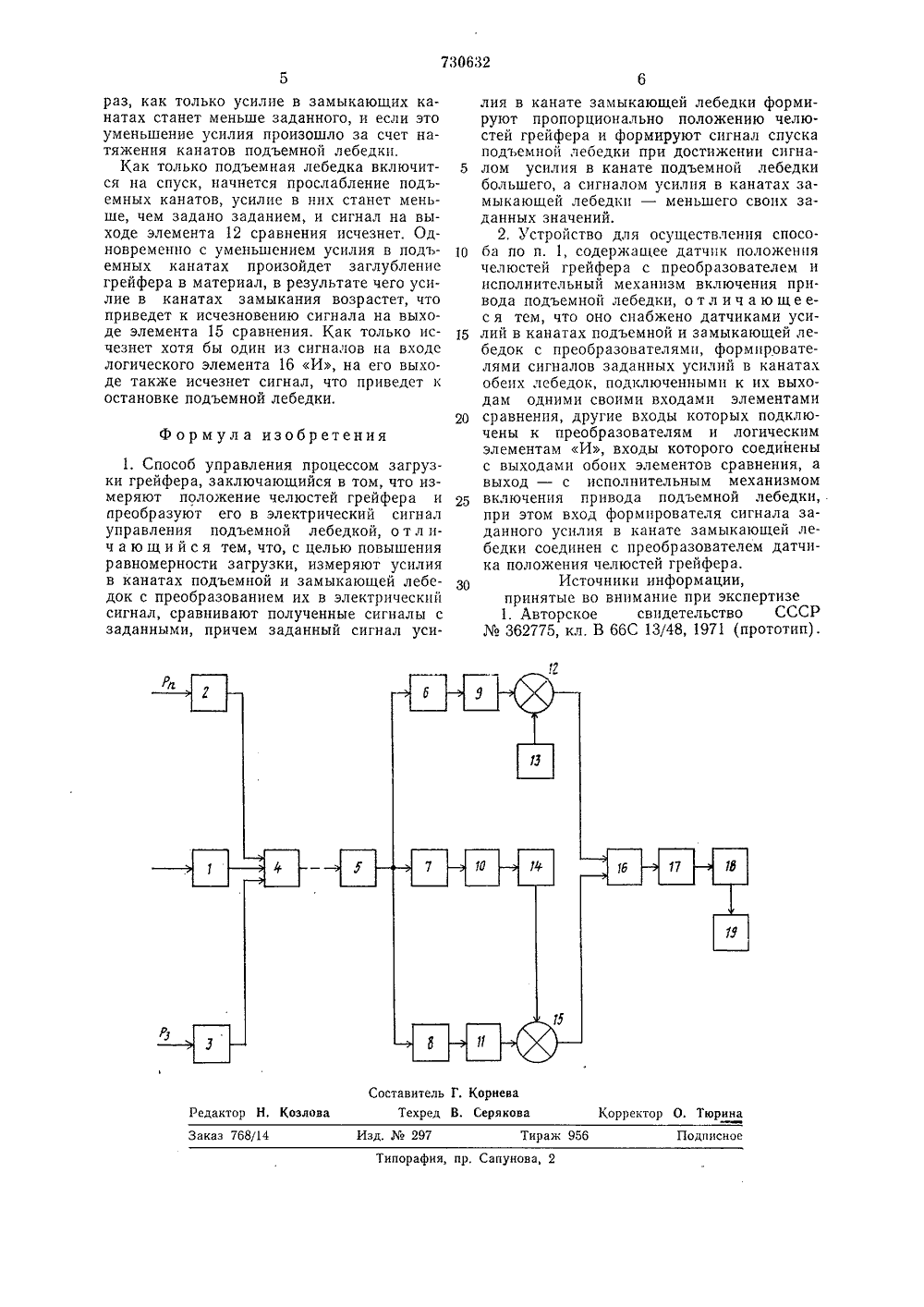
1 щ 730632 ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик,45) Дата опубликования описания 30.04.80 3) УДК 621.868о делам изобретен открытии 2) Авторы изобретени А, Иванов, 1 О. В, Куваев и И. Ф. Коч епропетровский ордена Трудового Красного Знам горный институт им. Артема(71) Заявитель 54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЗАГРУЗКИЕЙФЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ4 гоа5 Изобретение относится к подъемно-транспортной технике, в частности к средствамавтоматического управления работой лебедочных механизмов, преимущественно грейферных подъемников,Известен способ управления процессомзагрузки грейфера, заключающийся в том,что измеряют положение челюстей грейфера и преобразуют его в электрический сигнал управления подъемной лебедкой, ц устройство, реализующее вышеуказанный способ, содержащее датчик положения челюстей грейфера с преобразователем и исполнительный механизм включения приводаподъемной лебедки 111, Однако известныеспособы и устройства для их осуществленияне обеспечивают равномерности загрузкигрейфера от цикла к циклу из-за того, чтоне учитывается первоначальное прослабление подъемных канатов, а также степень цхнатяжения в процессе загрузки и возможность возникновения значительных динамических нагрузок, вызванных растормажцванием подьемной лебедки грейфера безучета усилий в канатах.Цель изобретения - повышение равномерности загрузки грейфера,Поставленная цель достигается тем, чтоизмеряют усилия в канатах подъемной изамыкающей лебедок с преобразованием их 30 в электрическци сигнал, сравнивают полученные сигналы с заданными, причем заданный сигнал усилия в канате замыкающей лебедки формируют пропорционально положению челюстей грейфера и формируют сигнал спуска подъемной лебедки при достижении сигналом усилия в канате подъемной лебедки большего, а сигналом усилия в канатах замыкающей лебедки - меньшего своих заданных значений.Устройство снабжено датчиками усилий в канатах подъемцоц ц замыкающей лебедок с преобразователями, формирователями сигналов заданных усилии в канатах обеих лебедок, подключенными к их выходам одними своими входами элементами сравнения, другие входы которых подключены к преобразователям ц логическим элементам ссИ, входы которого соединены с выходами обоих элементов сравнения, а выход - с исполнительным механизмом включения привода подъемной лебедки, при этом вход формирователя сигнала заданного усилия в канате замыкающей лебедки соединен с преобразователем датчика положения челюстей грейфера.Процессы, связанные с зачерпыванием материала, сопровождаются сложными объемнымц деформациями. Вначале опущенный грейфер под действием собственного веса врезается в материал, а затем под действием усилий в замыкающих канатах начинается поворот челюстей с одновременным вертикальным перемещением их вниз. Благодаря этому из массива материала вырезается слой, объем которого определяется контуром челюстей и глубиной внедрения их в материал. Далее происходит перемещение постепенно увеличивающегося объема материала к середине грсйфера.В начале зачерпывания усилия в канатах замыкания равны нулю и возрастают по мере смыкания челюстей грейфера. Скорость нарастания усилий в замыкающих канатах зависит от количества материала, захваченного челюстями грейфера, которое в свою очередь определяется глубиной внедрения их в материал. Глубину внедрения челюстей регулируют периодическими прослаблениями канатов подъемной лебедки, поддерживая усилия в них не выше определенного уровня, зависящего от вида груза.Таким образом, для неоднократного заполнения грейфера одним и тем же количеством материала необходимо изменять усилия в канатах подъемной лебедки таким образом, чтобы усилия в канатах замыкающей лебедки менялись по одному и тому же закону, т. е. при зачерпывании груза каждому вполне определенному положению челюстей грейфера должны соответствовать вполне определенные усилия в канатах замыкающей лебедки, При выполнении этого условия челюсти грейфера будут описывать одну и ту же траекторию (кривую зачерпывания), а грейфер будет загружаться одним и тем же количеством груза.Таким образом, для достижения поставленной цели необходимо непрерывно измерять положение челюстей грейфера и усилия в канатах подъемной и замыкающей лебедок при зачерпывании груза. Сигналы, пропорциональные каждому положению челюстей грейфера, необходимо преобразовывать в сигналы, пропорциональные необходимому для данного положения челюстей грейфера усилию в канатах замыкающей лебедки, и сравнивать их с сигналами датчика, измеряющего усилия в канатах этой лебедки. При рассогласовании между сигналами необходимо провести корректировку усилий в канатах замыкающей лебедки в сторону уменьшения полученного рассогласования.На чертеже показана схема устройства для реализации способа управления процессом загрузки грейфера,Устройство содержит частотные датчики 1, 2, 3 положения челюстей грейфера, усилия в подъемных канатах, усилия в замыкающих канатах, установленные непосредственно на грейфере, Выходы датчиков 1 - 3 соединены со входом передающей ка 1 О 1 г 20 25 30 35 40 45 50 55 60 65 тушки 4, охватывающей один из рабочих канатов крана. Приемная катушка 5 также охватывает этот канат и установлена на кране. Выход приемной катушки 5 связан со входами фильтрующпх усилителей 6 - 8, соединенных с преобразователями 9, 10, 11. Выход преобразователя 9 соединен со входом элемента 12 сравнения, другой вход которого связан с выходом формирователя 13 усилия в канате подъемной лебедки, Выход преобразователя 10 соединен со входом формирователя 14 усилия в канате замыкающей лебедки. Входы элемента 15 сравнения связаны с выходами преобразователя 11 и формирователя 14, а его выход - с первым входом логического элемента 16 И, к другому входу которого подключен выход элемента 12 сравнения, Выход элемента 16 И через релейный усилитель 17 мощности и исполнительный элемент 18 связан с командоконтроллером 19.Устройство работает следующим образом.Датчиками 1, 2 и 3 измеряют соответственно угол а между челюстями грейфера, усилие Рв подъемных и усилие Р, в замыкающих канатах. Сигналы от датчиков передаются на кран с помощью катушек 4 и 5 по одному из рабочих канатов крана. Усилителями 6 - 8 сигналы разделяются друг от друга по частоте и усиливаются, С помощью преобразователей 9 - 11 производится преобразование частотного сигнала в амплитудный. По сигналам датчика 1 формирователь 14 задания формирует сигнал, по которому должно изменяться усилие в канатах замыкающей лебедки для полного заполнения грейфера. Этот сигнал подается на вход элемента 15 сравнения, на второй вход которого подается сигнал, пропорциональный усилию в замыкающих канатах, измеряемому датчиком 3. Сигнал на выходе элемента 15 появляется в том случае, если сигнал, пропорциональный усилию в замыкающих канатах, станет меньше задания, сформированного формирователем 14. Сигнал, пропорциональный усилию в подъемных канатах, поступает на вход элемента сравнения 12, на второй вход которого подается задание с формирователя 13. Сигнал на выходе элемента 12 появляется в том случае, когда усилие в подъемном канате больше определенного уровня, устанавливаемого формирователем 13. Сигналы с выходов элементов сравнения 12 и 15 поступают на вход логического элемента 16 И. При наличии сигналов на обоих входах элемента 16 И на его выходе появляется сигнал, который усиливается усилителем 17 и приводит в действие элемент 18, который замыкает соответствующие канаты командоконтроллера 19, включая тем самым на спуск лебедку подъема, Таким образом, лебедка включается на спуск всякий730632 20 17 оставитель Г, Корнева Техред В. Серякова Редактор Н, Козлова Корректор О, Тюрина зд. Мв 29 каз 768/14 ираж 956 писное ипорафия, пр. Сапуно раз, как только усилие в замыкающих канатах станет меньше заданного, и если это уменьшение усилия произошло за счет натяжения канатов подъемной лебедки.Как только подъемная лебедка включит ся на спуск, начнется прослабление подьемных канатов, усилие в них станет меньше, чем задано заданием, и сигнал на выходе элемента 12 сравнения исчезнет. Одновременно с уменьшением усилия в подь емных канатах произойдет заглубление грейфера в материал, в результате чего усилие в канатах замыкания возрастет, что приведет к исчезновению сигнала на выходе элемента 15 сравнения. Как только ис чезнет хотя бы один из сигналов на входе логического элемента 16 И, на его выходе также исчезнет сигнал, что приведет к остановке подъемной лебедки. Формула изобретения 1, Способ управления процессом загрузки грейфера, заключающийся в том, что измеряют положение челюстей грейфера и преобразуют его в электрический сигнал управления подъемной лебедкой, о т л ич а ю щ и й с я тем, что, с целью повышения равномерности загрузки, измеряют усилия в канатах подъемной и замыкающей лебедок с преобразованием их в электрический сигнал, сравнивают полученные сигналы с заданными, причем заданный сигнал усилия в канате замыкающей лебедки формируют пропорционально положению челюстей грейфера и формируют сигнал спуска подъемной лебедки при достижении сигналом усилия в канате подъемной лебедки большего, а сигналом усилия в канатах замыкающей лебедки - меньшего своих заданных значений.2. Устройство для осуществления способа по п. 1, содержащее датчик положения челюстей грейфера с преобразователем и исполнительный механизм включения привода подъемной лебедки, о т л и ч а ю щ е ес я тем, что оно снабжено датчиками усилий в канатах подъемной и замыкающей лебедок с преобразователями, формирователями сигналов заданных усилий в канатах обеих лсбедок, подключенными к их выходам одними своими входами элементами сравнения, другие входы которых подключены к преобразователям и логическим элементам И, входы которого соединены с выходами обоих элементов сравнения, а выход - с исполнительным механизмом включения привода подъемной лебедки, при этом вход формирователя сигнала заданного усилия в канате замыкающей лебедки соединен с преобразователем датчика положения челюстей грейфера.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР362775, кл. В 66 С 13/48, 1971 (прототип).
СмотретьЗаявка
2541910, 09.11.1977
ДНЕПРОПЕТРОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ ИМ. АРТЕМА
ИВАНОВ АНАТОЛИЙ АЛЕКСАНДРОВИЧ, КУВАЕВ ЮРИЙ ВИКТОРОВИЧ, КОЧУРА ИВАН ФЕДОТОВИЧ
МПК / Метки
МПК: B66C 13/32
Метки: грейфера, загрузки, процессом
Опубликовано: 30.04.1980
Код ссылки
<a href="https://patents.su/3-730632-sposob-upravleniya-processom-zagruzki-grejjfera-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления процессом загрузки грейфера и устройство для его осуществления</a>
Устройство для автоматического управления приводом буровой лебедки при спуско-подъемных операциях

Номер патента: 991035
Опубликовано: 23.01.1983
Авторы: Колеватов, Ольховиков, Радченко, Феглер
МПК: E21B 19/00, E21B 44/00
Метки: буровой, лебедки, операциях, приводом, спуско-подъемных
...один из входов аналоговой системы4 от программно-задающей системы 2,и сигнала, пропорционального разности между заданным и фактическим положением талевого блока, поступающего на второй вход аналоговой системы 4 автоматизации от цифровойследящей системы 3. Сигнал о заданном конечном положении талевого блока на цифровую следящую систему 3приходит из программно-задающей сис. теьы 2 по команде блока 1 записи ивывода информации. Текущая информация о Фактическом положении талевого блока, входящего в состав механизма лебедки с талевой системой б,поступает от цифровой следящей системы 3 на один из входов программноэадающей системы и испольэуется длязапоминания необходимых констант,втом числе длины очередной К-й свечи.Устройство...
Устройство для защиты шахтной подъемной установки от напуска подъемных и перегрузки направляющих канатов

Номер патента: 1416425
Опубликовано: 15.08.1988
Авторы: Васильев, Опарин, Трифанов
МПК: B66B 5/12
Метки: защиты, канатов, направляющих, напуска, перегрузки, подъемной, подъемных, установки, шахтной
...с датчиков 2.1 - 2,8, кото" рые пропорциональны усилию в канатных проводниках Р = О. Так как напряже" ние с выхода блока 10 пропорциональО + Рп, где аРдопустимое превьппение усилия в нижнем сечении канатных проводников, то на выходе блока 15 имеется сигнал.Таким образом, при нормальной работе машины в направлении Вперед сигналы с блоков 13-15 поступают на элемент И 16 совпадения, в результате чего на его выходе есть сигнал, и блок 17 включен, а сигнал для на" ложения на машину аварийного тормоза отсутствует.Аналогично работает устройство при движении подъемной машины в направлении "Назад", с той разницей, что теперь открыты ключи 7.18 и 7.20.При возникновении аварийной ситуа" ции возможны следующие варианты.Предположим, что...
Прижимное устройство для каната лебедки

Номер патента: 334167
Опубликовано: 01.01.1972
Авторы: Семенов, Ход, Черкасов
МПК: B66D 1/36
Метки: каната, лебедки, прижимное
...оснований не более диаметра каната,На чертеже изображено предлагаемое устройство, общий вид; разрез по А - А - ролик прижимного устройства.Кронштейны 1 и 2 прижимного устройства подвижно установлены на оси, закрепленнойеках 3 и 4, и прижимаются постоянно к абану б лебедки пружинами б и 7. На цапфах 8 и 9, запрессованных в кронштеины 1 и 2, шарнирно закреплены пальцами 10 и 11 втулки 12 и 13. Втулки могут поворачиваться относительно пальцев 10 и 11 на опре деленный угол в плоскости, проходящей черезось прижимного ролика 14 и барабана 5 лебедки. Прижимной ролик 4, выполненный в виде соединенных вершинами усеченных конусов, свободно сидит на втулках 12 и 13. О При вращении барабана б лебедки прижимной ролик 14 также вращается за счет...
Прижимное устройство для каната лебедки

Номер патента: 543612
Опубликовано: 25.01.1977
Авторы: Кравец, Пивчик, Файнин, Федоров, Филоненко
МПК: B66D 1/36
Метки: каната, лебедки, прижимное
...качества укладки каната на барабан и упрощение конструкции устроиства,Это достигается тем, что крестовина выполнена пустотелой с установленными внутри нее подшипниками, в которых смонтирована ось, жестко связанная своими концаминой в нем цэвэрэтнэй пустотелой крестовиной5Ролики 1 и 2 с пэмэшью шайб 6, болтов7 и втулок 8 жестко соединены между собой осью 9, вращающейся в подшипниках 10, 5закрепленных внутри крестовины 5,Ролики 1 и 2 радиальным усилием, зависяшим эт настройки пружины рычага 4, прижимают канат к барабану 3,При врашении барабана 3 лебедки за 16счет конусности ролика создается осевое, поотношению к барабану, усилие, прижимаюшее навиваемый канат к соседнему, намотанному ранее витку,Кроме того,. ролики своей средней частью...
Прижимное устройство для каната лебедки

Номер патента: 910528
Опубликовано: 07.03.1982
Авторы: Поляков, Розанова, Симанин, Фролов
МПК: B66D 1/36
Метки: каната, лебедки, прижимное
...реборды барабана б, 2 О установленного в опорах 7.Кронштейн 4 шарнирно соединеносяьвт 8 и 9 с подпружиненным, рычагом,состоящим иэ тяг 10 и 11, которыечерез оси 12 и 13 соединены с поворотным элементом 14, установленнымс воэможностью поворота на осях 17в стойках 18 под действием усилияпружин 15 и 16, закрепленных однимконцом на стойках 18, а другим упирающихся в поворотный элемент 14.Применение изобретения позволит улучшить .качество намотки каната на барабан лебедки, повысив плотность навивки каждого витка каната и исключив перехлестывание и образование петель при работе каната без нагрузкиФормула изобретенияПрижимное устройство для канаталебедки, содержащее прижимной ролик,закрепленный на подпружиненном рычаге, соединенном с...
Предыдущий патент: Устройство управления приводом шахтной подъемной машины
Следующий патент: Термический деаэратор
Случайный патент: Парогенератор