Способ автономного определения малых угло-вых перемещений обекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 664399
Автор: Бухман


Текст
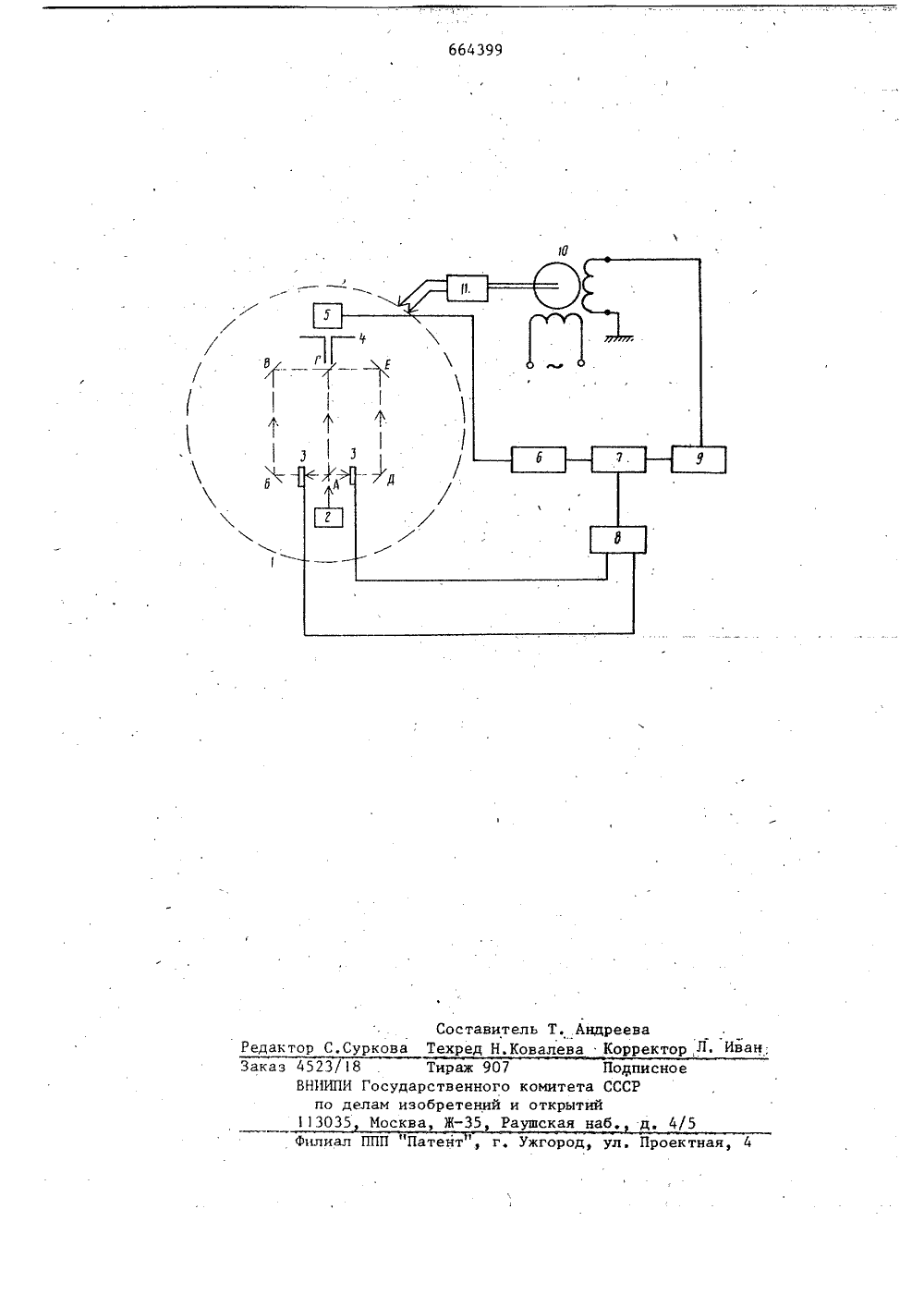
ОП ИКАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советски кСоцналнстнчесинкРеспублик 1 ц 664399(53)М. Кд. О О Р 3/36 Геоударстееииый комитет СССР оо делам изобретений и открытий(54) СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ МАЛЬЕ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА Изобретение касается прецизионногообнаружения и измерения малых угловыхперемещений и может быть использовано,например, в системах дальней навигации для стабилизации курса,5Известен способ использования "вих., ревого эффекта" для обнаружения медленных вращательных движений, например, корабля. Для этого используют оптическую "цепь", охватывающую контур,те площадь которого достаточно велика для того, чтобы заметить визуально или фотографически вращение корабля по интерференции двух лучей, один иэ которых направленпо направленую вращения, а другой - в противоположном направлении. Однако такой способ имеет невы- сокую точность индикации угловых перемещений, а устройство для его осуществления отличается сложностью, гро моздкостьюи низкой чувствительностью. Цель изобретения - повышение точности измерения угловой скорости и угла поворота объекта.Это достигается тем, что положение интерференционного датчика относительно осей объекта меняют припомощи сервопривода, управляемогосигналом датчика таким образом, чтобыпри повороте объекта в одном направлении датчик вращался в той же плоскости и с такой же угловой скоростью,но в противоположном направлении,при этом угловую скорость объектаопределяют п 6 скорости вращения промежуточного звена редуктора сервопривода, а угол поворота - по изменению положения датчика относительноосей объекта,На чертеже изображена функционапьная схема устройства для осуществления предлагаемого способа.На поворотной платформе 1 установлено оптическое. устройство 2, оптически связанное через коммутатор 33 66439с экраном 4 со щелью, за которым установлен фотоумножитель 5, соединенный с частотным узкополосным фильтром6, выход которого соединен с фазовым.дискриминатором 7, соединенным с генератором 8 коммутатора 3 и с усилителем сервопривода 9, связанного споворотной платформой 1 через исполнительный двигатель 10 с редуктором 11.Интерференционная картина на экране 4 образуется за счет взаимодействия двух лучей: луча, прошедшего.путь от точки А до Г и одного из лучей, прошедших контур ЛБВГ или АДЕГ,При вращении объекта, например, почасовой стрелке, луч АБВГ будет сов"падать с направлением вращенйя, а лучАДЕГ направлен в противоположную сторону, За счет коммутации лучей коммутатором 3 с частотой генератора 8 создаОется модуляция интерференционной картины на экране в случае абсолютноговращения платформы 1, т,е. вращения"относительно системы отсчета, определяемрй неподвижными звездами. Фототокфотоумножителя 5 при этом становится,периодической функцией, пропорциональной световому потоку, проходящему через щель экрана 4, Фильтр 6 выделяетиз этой функции гармоническую состав- ЗОляющую частоты генератора 8, При помощи фазового дискриминатора 7 осуществляется селекция сигнала по направлению вращения объекта, которыйзатем через сервоусилитель 9 вызывает З 5вращение исполнительного двигателя 10и через редуктор 11 - вращение платформы"в сторону, противоположную вращению объекта, Абсолютный угол поворота платформы40а ж = л ам-а,1 а,Огде Я.(1)- угловая сКорость вращейияобъекта;Я (Ф)- угловая скорость вращения 45платформыотносительно объекта. 9При условии 9 И=ЯЩлатформа оказывается стабилизированной по направлению, Определение угла поворота объекта производится по изменению положения относительно объекта, а скорость вращения объекта - по скорости вра-.щения платформы или другого вала, связанного с платформой редуктором.Практическая реализация предлагаемого способа позволяет повысить чувствительность и точность измерения малых угловых перемешений. Иэмеоение угловых скоростей порядка 0,1-0,01час дает возможность использовать изобретение при построении систем стабилизации курса,Формула изобретенияСпособ автономного определениямалых угловых перемещений объекта, основаннйй на использовании эффекта САНЬЯКА, осуществляемого при помощи интерференционного датчика, о тл и ч а ю щ и й с я тем, что, с целью повышения точности измерения угловой скорости и угла поворота объектй, положение интерференционного датчика относительно осей объекта меняют при помощи сервопривода, управляемого сигналом указанного датчика таким образом, чтобы при повороте объекта в одном направлении датчик вращался в той же плоскости и с той же угловой скоростью, но в противоположном направлении, при этом угловую скорость объекта определяют по скорости вращения промежуточного звена редуктора сервопривода, а угол поворота по изменению положения датчика относительно осей объекта.664399 Составитель Т. Андреевакова Техред Н.Ковалева Корректор Л, Иван,кто ПодписноеСССР б. д. 4 аз 4523/18 . Т р 07ВНИИПИ Государственного комитетапо делам изобретений и открытий113035 Москва, ЖРаушская на /5Филиал ППП "Патент , г, Ужгород, ул. Проектная
СмотретьЗаявка
713445, 18.11.1961
БУХМАН А. Б
МПК / Метки
МПК: G01P 3/36
Метки: автономного, малых, объекта, перемещений, угло-вых
Опубликовано: 15.06.1981
Код ссылки
<a href="https://patents.su/3-664399-sposob-avtonomnogo-opredeleniya-malykh-uglo-vykh-peremeshhenijj-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ автономного определения малых угло-вых перемещений обекта</a>
Измеритель скорости и направления течения

Номер патента: 879472
Опубликовано: 07.11.1981
Автор: Балакин
МПК: G01P 5/07
Метки: измеритель, направления, скорости, течения
...На роторе закреплен магнит 11, взаимодействующий с магниточувствительнымидиодами 12, установленными на крышке б.Работа измерителя осуществляется Следующим образом. Прибор, подвешенный на шарнире в придонном слое879472 О 25 30 3540 4550 55 4воды, обтекается водным потоком со скоростью в диапазоне от 0,2 до 15 см/с. Корпус 1 сохраняет вертикальное положение за счет собственного веса и шарнирной подвески. Под действием потока воды ротор 8 начинает вращаться, причем, благодаря элементу асимметрии 9, его вращение происходит неравномерно. Когда элемент 9 движется по потоку, скорость ротора увеличивается, а при встречном движении замедляется.При вращении ротора 8 магнит 11 проходит над магваточувствительными диодами 12, вызывая изменение их...
Цифровой измеритель относительной разности скоростей

Номер патента: 1015306
Опубликовано: 30.04.1983
Автор: Зайцев
МПК: G01P 3/56
Метки: измеритель, относительной, разности, скоростей, цифровой
...блока задания соотношения скоростей, ключ выполнен переключающим, а блок управления выполнен в виде последовательно соединенных генератора импульсов, второго ключа и формирователя импульсов, два выхода которого являются выхо,дами блока управления, информационным входом которого является управляющий вход второго ключа, причем информационные разрядные выходы блока задания соотношения скоростей подключены к соответствующим входам предварительной записи реверсивного счетчика, информационные выходы которого соединены с соответствующими входами блока памяти, знаковый информационный вход которого подключен к выходу триггера знака и к управляющему входу первого ключа, .второй выход которого соединен.с вычитающим входом реверсивного счетчика,...
Датчик скорости и направления вращения

Номер патента: 1283661
Опубликовано: 15.01.1987
МПК: G01P 13/02
Метки: вращения, датчик, направления, скорости
...первого и третьегоэлементов И 6 и 8 и выходом к второму входу первого триггера 11, подсоединенного выходом к второму входу седьмого элемента И 22, и элемент.ИСКЛЮЧАЮЩЕЕ ИЛИ 24 соединен вторым входом с выходом второго формирователя 5 сигналов.Датчик скорости и направления вращения работает следующим образом.При движении кодового элемента 1 относительно чувствительных элементов 2 и 3 они формируют электрические сигналы, которые преобразуютсяв логические уровни напряжения формирователями 4 и 5 сигналов. Состояниевходов элементов И 6 - 9 определяется в зависимости от логических уровней, формируемых на выходах формирователей 4 и 5 сигналов, счетчика 25 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 24. Порядок чередования состояний сигналов на выходах...
Устройство для индикации направления относительного перемещения двух объектов

Номер патента: 371516
Опубликовано: 01.01.1973
Автор: Сочивко
МПК: G01P 13/02
Метки: двух, индикации, направления, объектов, относительного, перемещения
...диэлектрической жидкостью, а подвижной контакт прикреплен к двум плоским,пружинам, фрикционно связанным с боковыми стенками паза контролируемого объекта с помощью ориентированных в противоположные стороны плосиих поверхностей.,Это позволяет расширить, диапазон индикации. о. Свободныи конец,подвииното контакта выполнен в виде двух плоских пружин, снабженных ориентированными в противоположные стороны плоскими фрикционными поверхностя ми 6, скользящими в специальном лазу 7 другого объекта 8, перемещающегося опносительно,первого объекта. Электрическое напряжение подводится к подвижному контакту в месте его соединения с мембраной и снимается 0 с элекцрических контактов д.Устройство работает следующим образом.При наличии относительного...
Устройство для измерения скорости и направления вращения оси приемников скорости потока газа или жидкости

Номер патента: 879471
Опубликовано: 07.11.1981
Автор: Шендерович
Метки: вращения, газа, жидкости, направления, оси, потока, приемников, скорости
...и схему измерения входных электрических сигналов 111.Иэ известных устройств для измерения скорости и направления враще,йия наиболее близким по технической сущности к предлагаемому изобретению1 З является устройство для измерения скорости и направления вращения оси приемников скорости потока газа нлн жидкости, содержащее приемник скорос20 ти потока, на котором укреплен модулятор, выполненный в виде диска с прорезями, два датчика импульсов и два счетчика импульсов 2 1Указанное устройство имеет низкуюначальную чувствительность, поскольку диск, предназначенный для опредепения направления вращения оси ветроприемника, постоянно тормозит движение оси. Этов свою очередь, при. -водит к существенным ошибкам приизмерении малых скоростей...
Предыдущий патент: Импульсный сильноточный ускоритель электронов
Следующий патент: “способ автономного определения малых угловых перемещений обекта
Случайный патент: Линия для изготовления древесностружечных плит