Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
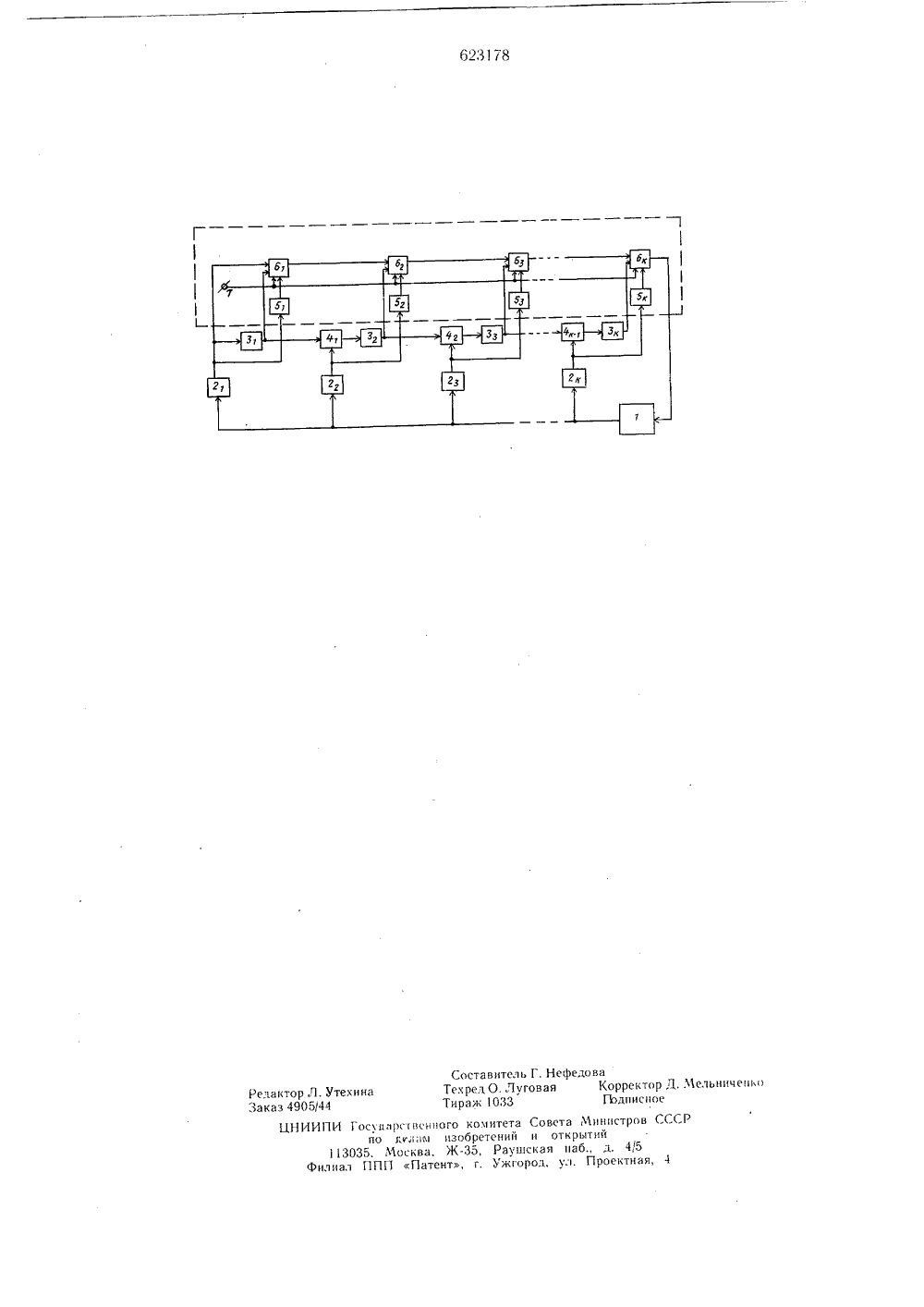
: Л,1 ,О П И С А и ИЕ ИЗОБРЕТЕН ИЯ Союз Советских Социалистических Реслублик(5 сударственный комитеоввта Министров СССРоо делам изобретенийи Открытий5) Дата опубликования описания ъа,ов.тз 72) Авторы изобретен К. А, Пупков н А. И, Мо(71) Заявител Московский институт электронного машиностроения 4) СИСТЕМА УПРАВПЕН Изобретение о бс рнетике и автом и может быть исп оптимальной по управления летат тродвигателями, э нологическими пр тносится к атическом ользовано быстродейельными ап нергоблока оцессами и техническои кирегулирова нию в качестве субствию системы паратами,элекми, химико-техт. п. Известны системыют субоптимальное поравление 1.Наиболее близкой по технической сущ с ности к изобретению является система управления, содержащая 1 с линейных преобразователей, 1 с релейных преобразователей и 1 с - 1 сумматоров. Вход каждого линейного преобразователя соединен с выходом объекта управления. Выход первого линейного преобразователя подключен ко входу первого релейного преобразователя, выход 11+ 1)-го линейного преобразователя соединен с одним из входов 1-го сумматора. Другой вход 1-го сумматора подключен к 20 выходу 1-го релейного преобразователя. Выход 1-го сумматора соединен с входом 11+ 1) -го релейного преобразоватея Р 1 Недостатком этой системы является сравнительно невысокое качество управления, которое обусловлено тем, что при малых отклонениях динамических характеристик объекта от заданных система управления вырабатывает и подает на объект управления максимальные по величине управляющие сигналы, в результате чего она попадает в автоколебательный или вибрацнонный режим,Целью изобретения является повышение качества управления.Эта цель достигается тем, что предложенная. система управления дополнительно содержит задатчик напряжения срабатывания, 1 с выпрямителей и 1 с релейных элементов, Вход 1-го выпрямителя соединен с вы ходом 1-го линейного преобразователя, а выход - с первым входом 1-го релейного элемента. Второй вход 1-го релейного элемента подключен к задатчику напряжения срабатывания. Размыкающий контакт первого релейного элемента соединен с выходом первого линейного преобразователя, Размыкающий контакт (1+ 1) -го релейного элемента подключен к подвижному контакту 1-го релейного элемента. Замыкающий контакт 1-го релейного элемента соединен с выхоры из унифицированных блоков, содержащих только выпрямители, релейные и линейные элементы.Точность приближения к оптимальной по быстродействию системе определяется числом таких блоков, что в принципе не увеличивает сложность системы управления. Формула изобретения Система управления, содержагцая 1 линейных греобразователей, М релейных преобразователей и 1 - 1 сумматоров, вход каждого линейного преобразователя соединен с выходом объекта управления, выход первого линейного преобразователя подключен к входу первого релейного преобразователя, выход (+1)-го линейного преобразователя соединен с одним из входов 1-го сумматора, другой вход 1-го сумматора подключен к выходу 1-го релейного преобразователя, выход 1-го сумматора соединен с входом (+1) -го релейного преобразователя, отличаюи 1 аяся тем, что, с целью повышения качества управления, система управ 25 ления содержит задатчик напряжения срабатывания, 1 выпрямителей и 1 релейных элементов; вход 1-го выпрямителя соединен с выходом 1-го линейного преобразователя, а выход - с первым входом 1-го релейного элемента; второй вход 1-го релейного элеЗО мента подключен к задатчику напряжениясрабатывания; размыкающий контакт первого релейного элемента соединен с выходом первого линейного преобразователя, размыкающий контакт (+1) - о релейного элемента - с подвижным контактом 1-го релейного элемента; замыкающий контакт 1-го релейного элемента соединен с выходом 1-го релейного преобразователя, а подвижный контакт 1-го релейного элемента подключен ко входу объекта управления.40 Источники информации, принятые во внимание при экспертизе:1. Фельдбаум А, А. Основы теории оптимальных автоматических систем М., Наука, 1966, с. 175 - 176.2. Слцпс 1 е 1, А., Оп йе сопз 1 гцсоп о 11 Ьс едшчаеп 1 з 1 гцс 1 цге о а пеаг 11 шеор 1 гпа соп 1 гоег. Ацгогпа 1 са,7, Л 1, 1971, рр 51 - 66. 623178 дом 1-го релейного преобразователя, а подвижный контакт 1-го релейного элемента подключен к входу объекта управления.На чертеже дана структурная схема пред.лагаемой системы управления.Она содержит объект управления 1,линейных преобразователей 2 - 2 1 релейных преобразователей 3 - 3 1 - 1 сумматоров 4 - 4,. 1 выпрямителей 5 - 5, 1 с релейных элементов 6, - 6 и задатчик на 10 пряжения срабатывания 7.Система работает следующим образом.При малых величинах сигнала на выходе объекта 1 малы сигналы, поступающие на обмотки элементов 6- 6 поэтому на вход объекта 1 поступает сигнал, проходя ший через размыкающие контакты этих элементов. Этот сигнал формируется в первом линейном преобразователе 2, (т. е. при малых отклонениях управление осуществляется по линейному закону). Линейный закон можно выбрать таким образом, чтобы замкнутая система была нечувствительна к внешним возмущениям и вариациям параметров. При достижении сигналов на выходе 1-го преооразователя 2 заданного уровня элемент 6 замыкает другой контакт и разрывает цепь, соединяюшую выход преобразователя 2, с входом объекта 1. При этом на его вход поступает сигнал с одного из выходов преобразователей 3 - 3. равным по величине максимальному значению управляющего сигнала (при превышении сигналами на выходах преобразователей 2 - 1 заданного уровня управление вырабатывается по релейному закону).Коэффициенты линейных преобразователей могут быть выбраны таким образом, что релейпый закон буде, обеспечивать субоптимальные по быстродействию процессы отработки рассогласований.Использование системы позволяет повысить качество процессов, расширить область устойчивости замкнутых систем при ограниченных управляющих сигнал, сохранить быстродействие, исключить вибрационные и автоколебательные режимы, что повысит динамическую точность и надежность.Кроме того, предлагаемая система конструируется однотипно для объектов различной размерности и различной структуРедактор Л. Утехи Заказ 4905/44 Составитель Г. Нехред О. Луговаираж033 едо ва Корректор Д. Мельниченко ПодписноеССР НИИПИ Госаирсзвсн по кна 113035, Москва,Филиал ППП Патго кохизобретЖ,т, г. итета Совета Министровений и открытийРаушская наб., д. 4/5Ужгород, ул. Проектная
СмотретьЗаявка
2366528, 01.06.1976
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
ПУПКОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ, МОРОЗ АЛЕКСАНДР ИВАНОВИЧ
МПК / Метки
МПК: G05B 11/16
Метки:
Опубликовано: 05.09.1978
Код ссылки
<a href="https://patents.su/3-623178-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для соединения входа сборной головки с выходом устья скважины

Номер патента: 1329625
Опубликовано: 07.08.1987
МПК: E21B 33/035
Метки: входа, выходом, головки, сборной, скважины, соединения, устья
...оборудован четырьмявходами-пазами, размещенными противоположно и образованными наклоннымиповерхностями 23. Наклонные поверхности каждого паза образуют сбоку плоскости 24 приближения, затем направляющие плоскости 25, которые сужаяпаз, расположены так, чтобы обеспечить совмещение в вертикальнойплоскости оси большого верхнего ролика 20 и оси малого нижнего ролика 2521, когда этот последний находит опору в нижней части паза, образованногонаклонными поверхностями.В соединительном модуле смонтирован механизм направления соединителя5. Этот механизм содержит вилку 26,в ветвях которой выполнены поверхности 27 скольжения, служащие для прямолинейного направления прижимных роликов 22. В продолжении вилки 26 находится рычаг 28, жестко связанный...
Релейный преобразователь аналоговых сигналов
Номер патента: 690502
Опубликовано: 05.10.1979
Автор: Цытович
МПК: G06G 7/12
Метки: аналоговых, релейный, сигналов
...8, В одну часть периода автоколебайий, соответствующую совпадению знаков сигнала управления и сигнала Обратной связи, подаваемогочерез резистор 9, скорость изменения Ивыходного напряжения усилительногоэлемента 8 увеличивается, а при разных знаках укаэанных сигналов этаскорость уменьшается.В результате среднее значение вы- Щходного напряжения преобразователя запериод автоколебаний устанавливается пропорциональным величине и соответствующим по знаку сигналу управления,Предположим, что при положительном импульсе напряжения релейногоэлемента 10 проводит первый элемент11, а при отрицательном импульсе -второй элемент 12.Тогда при отрицательном импульсевыходного напряжения, конденсатор 5подключен ко входам преобразователя,т.е, к источнику...
Преобразователь кода в угловое (линейное) положение

Номер патента: 150307
Опубликовано: 01.01.1962
Авторы: Гусев, Киселев, Критский, Рапопорт
МПК: H03M 1/66
Метки: кода, линейное, положение, угловое
...20 стройства с цримеиеика па два разряда. ить и для д 1 эуГих копомер контактирующей пластины; 1, - расстояние между пластциамц; число 10 показывает основание кода, а контактирующие пластццы образуют со щетками младшего разряда ИО 55 ус.Щетки подклОчаются и источнику питания Б прц помоци контактов ( задающего устройства в соответствии с входной ицформаццей, Щетка, соответствующая цифре вводимой информации в даш 1 ом разряде, ие подклю. чается к источнику питания, а все остальные щетки данного разряда подключаются. Так, цапрцмер, для введецця цифры 2 десятичной системы сч 1 слецип к источнику пцтация подключецы щетки, соответствуощце цифрам О, 1, 3, 4, 5, 6, 7, 8, 9, а щетка, соответствующая цифре 2, це подключена,Совпадение числа...
Релейный двоичный элемент

Номер патента: 444331
Опубликовано: 25.09.1974
МПК: H03K 23/03
Метки: двоичный, релейный, элемент
...тельной полярности электромагнитного Релейный двоичный элемент, содержащийдва диода и дистанционный переключатель,Изобретение относится к релейным автоматическим устройствам.Известные релейные двоичные элементы, содержащие два диода и дистанционный переключатель, состоящий из включающей и выключающей обмоток и переключающего контакта, обладают недостаточным быстродействием.Цель изобретения - увеличение быстродействия релейного двоичного элемента.Для этого релейный двоичный элемент дополнительно содержит два электромагнитных реле, причем вход релейного двоичного элемента соединен через нормально разомкнутые контакты первого и второго реле и, соответственно, включающую и отключающую обмотки дистанционного переключателя с шиной...
Устройство для испытания релейных коммутационных элементов

Номер патента: 612209
Опубликовано: 25.06.1978
МПК: G05B 23/02
Метки: испытания, коммутационных, релейных, элементов
...с другим блоком 10 эа- ЗО держки, который подключен к генератору 11 напряжения. Этот гецератор подключен к входу цепи 4 последовательно соединенных испытываемых контактов так, что ток в цепи протекает в противоположном направлении, Генератор 11 импульсов напряжения связан также с измерительным блоком 5.Работа предложенного устройства происходит следующим образом.Блок 7 управления производит запуск мультивибратора 1, который работает с частотой, установленной оператором на блоке управления. С одного выхода мультивнбратора 1 происходит одновременный запуск как формирова.-еля 2 управляющих импульсов, так и одного блока 8 задержки, Формирователь управляю щих импульсов подает ток и обмотки возбуждения 3 коммутационных элементов на...
Предыдущий патент: Устройство для статического микрофильмирования
Следующий патент: Цифровой электропривод
Случайный патент: Привод для испытаний агрегатов трансмиссии транспортного средства