Устройство для моделирования виброзащитных систем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 607239
Авторы: Оржекаускас, Рагульскис, Скучас
Текст
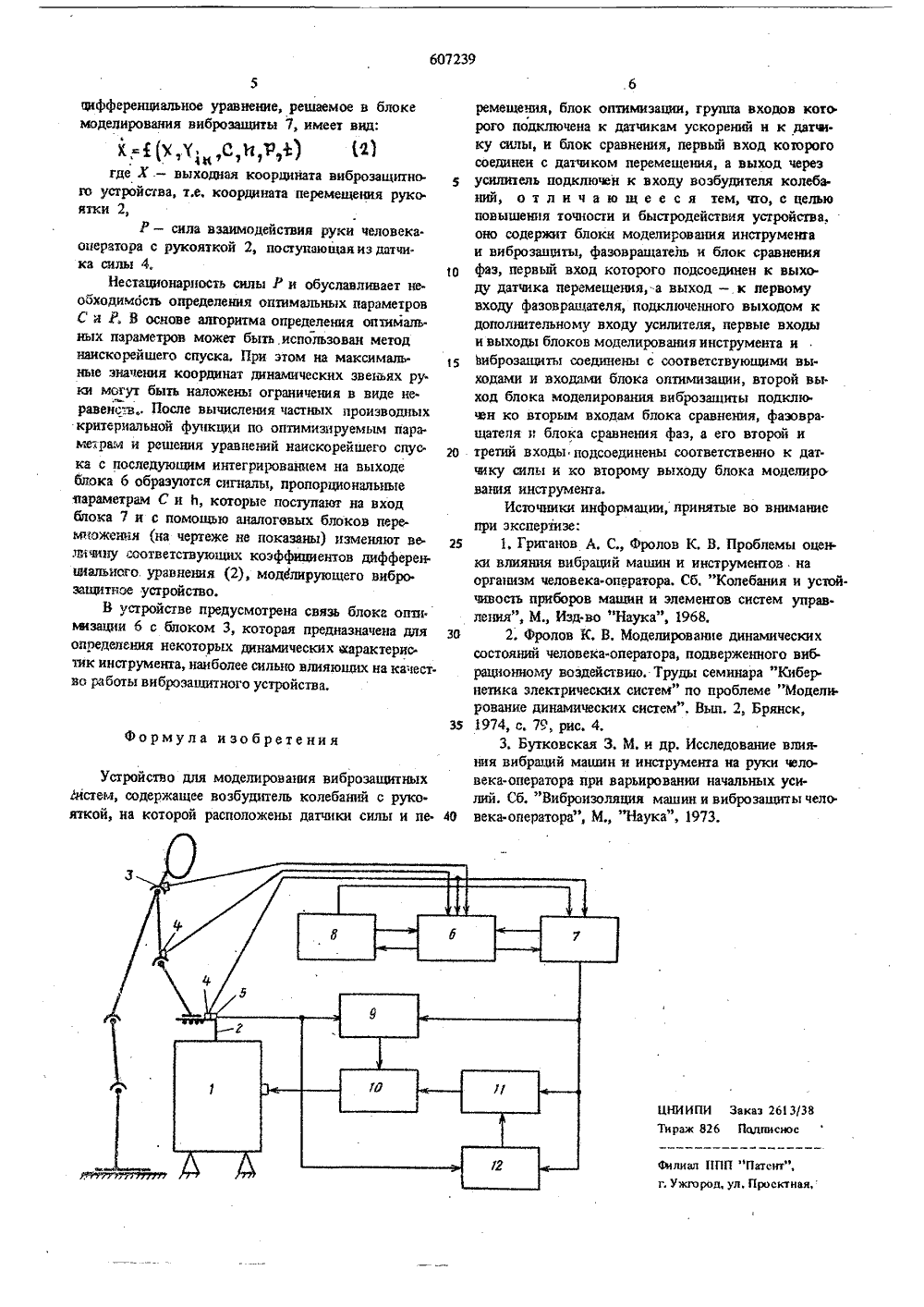
ОПИСАНИИ оИ ЗО ВРЕТЕ Н ИЯК АВТОРСКОМУ СВИДВТВПЬСТВУбт) Дополнительк(22) Заявлено 27.06,75 (21) 2149604/18-2 Щ М. Кл, 606 67/4 рисоединениеь Гасударственный ивмитет Совета Миииетрав СССР пв делам юееретеиий и втнрытий(53) У 1,33588.8) Дата опубликования описания 28.04.7(71) Заявител Каунасский политехнический иттституг им. Антанаса Снечк(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВИБРОЗАЩИТНЬИСИСТЕМ 2.аторы случайных колебанийсов, измерительньпт усилитель чайных импуегистратор снятия амплитудн , века-оператора в мер, "сидя", "сто ристикам можно параметрах вибро о 3"ттзобретение относится к. аналоговой вычисли тельной технике и может быть использовано в области виброзащиты человека-оператора, а также для оценки влияния вибраций на его организм,Известно устройство для исследования динами. ки взаимодействия руки человека с инструментом, содержащее инструмент с укрепленными на его ру. коятке датчиками силы, ускорения, перемещения, выходы которых через усилители подключены к регистрирующему прибору 11, Недостатком этого устройства является то, что для динамических ис. следований используются реальный инструмент, ко торый не позволяет варьировать параметрами вибраций, т.е. амплитудой; частотоп, а определение опти. мальных виброзащитных средств осуществляется методом механического подбора элементов вибро защиты.Иовестно также устройство для определения динамических характеристик человека-оператора, содержащее генератор синусоидальньтх колебаний, выход которого через усилитель мощности лодклю. чен к входу возбудителя колебаний, пьезодатчики, установленные на динамических звеньях человека. опеуатора, рулевое колесо, систему оценки качеств слежения, систему оценки времени реакции, гене б ройство в основном предназначено дляо-частотных характеристик чело.различньк рабочих фазах, как нап я" и т.д.По полученным характесудить о структуре и некоторых защитной системы, однако недоустройства является то, что оно не поэ определить оптимальные параметры вибро. ой системы во время эксперимента,Наиболее близким техническим решением к данному изобретению является устройство для моделирования виброзащитных систем,. которое со. держит возбудитель колебаний с рукояткой, на ко. торой расположены датчики силы н перемещения, блок оптимизации, группа входов которого подключена к датчикам ускорений и к датчику силы, и блок сравнения, первый вход которого соединен с датчиком перемещения, а выход через усилитель подключен к входу возбудителя колебаний т 31,Недостатком этого устройтства является то, чт оно также не позволяет в процессе динамическихисследований непосредственно определить оптималь.ные параметры виброзащитных средств.Целью изобретения является повышение точности и быстродействия устройства,Это достигается тем, ято предлагаемое уст.ройство содержит блоки моделирования инстру.мента и виброзащиты, фазовращатель и блок сравнения фаз, первый вход которого подсоединен квыходу датчика перемещения, а выход - к перво.му входу фазовращателя, подключенного выходом 1 Ок дополнительному входу усилителя, первые входыи выходы блоков моделирования инструмента ивиброзащиты соединены с соответствующими вы.ходами и входами блока оптимизации, второйвыход блока моделирования виброзащиты подключен ко вторым входам блока сравнения, фа.зовращателя и блока сравнения фаз, а его второйи третий входы подсоединены соответственно к дат.чику силы и ко второму выходу блока моделира.вания инструмента, 20На чертеже представлена блок-схема описываьмого устройства для моделирования внброэащит.ных систем.Устройство для моделирования виброзащитныхсистем содержит возбудитель колебаний 1 с рукояткой 2, датчики ускорений 3, расположенные надинамических звеньях руки, датчики силы 4 и пе.ремещеиия 5, расположеннью на рукоятке 2, блокоптимизации 6, блок 7 моделирования виброэащиты, блок моделирования инструмента 8, блок срав. зонения 9, усилитель 10, фаэовращатель 11 и блок12 сравнения фаз.Устройство работает следующим образом,В блоке 8 модулируются дифференциальныеуравнения, описывающие динамику рабочих частей з 5исследуемого инструмента. Результатом решениязгих уравнений является функция перемещениякорпуса инструмента от времени. Сигнал, пропор.циональный этой функции, поступает на вход блока 7, в котором моделируются дифференциальные 4 оуравнения, описывающие виброэащитное устройство.На вход блока 7 поступает сигнал, пропорциональньй силе взаимодействия руки с рукояткой, иэдатчика силы 4, Таким образом, на виброзащитюе устройство, моделируемое в блоке 7, действует со стороны корпуса инструмента кинематичеокое и силовое возбуждения, которые в виде злект.рических сигналов поступают на соответствующийвход, Результатом совместного решения уравнений,моделируемых в блоке 8 и в блоке 7, является 50функция перемещения рукоятки исследуемого инструмента от времени, сигнал, пропорциональныйкоторой, поступает на выход блока 7.Этот сигнал через фазовращатель 11 и уснли.55тель 10 поступает на вход возбудителя колебаний1, который трансформирует электрический сигналв механическое движение и прикрепленная к немурукоятка 2 имитирует перемещение рукоятки иссле;дуемого инструмента. Сила взаимодействия рукичеловека-оператора с укрепленной на столе возбу. дателя колебаний 1 рукояткой 2 регистрируется дат.чиком щлы 4, Ввиду того, что для имитации перемещения рукоятки исследуемого инструмента требует.ся высокая точность трансформации злектрическо.го сигнала, а присоединенная масса руки человека.оператора к рукоятке 2 является переменнойвеличиной, для управления возбудителем колеба.ний введена обратная связь. Она осуществленас помощью блока сравнения 9 и блока сравненияфаз 12, фазовращателя 11 и усилителя 10. Навходы блока сравнения фаз 12 поступает сигнал,пропорциональный перемещению рукоятки 2 с датчика 5, и задающий сигнал с выхода блока 7, Отклонение, появившееся при сравнении начальныхфаз этих сигналов, управляет фазовращателем 11,управляющий вход которого соединен с выходомблока 12. Для поддержания амплитуды перемеще.ния рукоятки 2, соответствующей сигналу с выхода блока 7, служит блок сравнения 9,входы которого соединены с выходом датчика перемещении5 и с выходом блока 7, а выход с управляющимвходом усилителя 10,Блок оптимизации 6 предназначен для автома.тической настройки параметров жесткости и дис.сипативности по заранее заданному критерию качества работы виброэащиты. Критерием качестваработы виброзащиты могут быль наименьшие аььплитуды перемещения рукоятки и последующихзвеньев руки при ограниченных виброскоростяхили наименьшие амплитуды внброускорений нриналичии ограничений на перемещение рукояткиотносительно корпуса инструмента.Таким образом, на входы блока оптимизадии6 поступает информация о текущих значениях ко.ординат иэ датчиков 4, 4, 2, а также значение коорди.наты перемещения корпуса инструмента с выхода бло.ка 8 и некоторые динамические характеристики самойвиброзащиты с выхода блока 7.Пусть моделируемый инструмент описываетсясистемой дифференциальных уравнений;и координата У ф) является функцией перемещения корпуса инструмента, Если рукоятка была бы прикреплена к корпусу инструмента непосредственно, то и ее движение, соответствовало бы коор динате У ). Однако для снижения уровня виб рации на рукоятке используется виброзащитное устройство, состоящее из упругих и диссипативных элементов. Система уравнений (1) моделируется в блоке 8 и сигнал, пропорциональный координате(1) с выходов поступает на вход блока 74 имоделирования виброзащиты и в блок оптимизации 6.В простейшем случае виброэащитное устройст. во состоит из упругого элемента жесткости С и демпфера с коэффициентом сопротивления Ь, иРУУ 7 Р 7 дифференциальное уравнение, решаемое в блокемоделирования виброзащиты 7, имеет вид:К, 1 х,.у;,с,и,Р 1) Югде Х . - выходная координата виброэащитного устройства, т,е, координата перемещения рукоятки 2,Р - сила взаимодействия руки человекаоператора с рукояткой 2, поступающая из датчи.ка силы 4,10Нестационарность силы Р и обуславливает необходимость определения оптимальных параметровС и Р, В основе алгоритма определения оптималь.ных параметров может быть, использован методнаискорейшего спуска При этом на максимальные значения координат динамических звеиях ру.ки могут быль наложены ограничения в виде не.равенств., После вычисления частных производныхкритериальной функции по оптимизируемым параметрам и решения уравнений наискорейшего спус.ка с последующим интегрированием на выходеблока 6 образуются снптальт, пропорциональныепараметрам С и Ь, которые поступают на входблока 7 и с помощью аналоговых блоков перемножения (на чертеже не показаны) изменяют ве. 2 чалину соответствующих коэффициентов дифферен.цяального уравнения (2), моделирующего вибро.защитное устройство.В устройстве предусмотрена связь блока оппььизации 6 с блоком 3, которая предназначена для зоопределения некоторых динамических юрактериотик инструмента, наиболее сильно влияющих на качест.во работы виброзащитного устройства. Формула изобретения Устройство для моделирования внброзащитных систем, содержащее возбудитель колебаний с рукояткой, на которой расположены датчики силы и пе 40 ремещения, блок оптимизации, группа входов кото.рого подключена к датчикам ускорений и к датжку силы, и блок сравнения, первый вход которогосоединен с датчиком перемещения, а выход черезусилитель подключен к входу возбудителя колеба.ний, о т л и ч а ю щ е е с я тем, что, с цельюповышения точности и быстродействия устройства,оно содержит блоки моделирования инструментаи виброзащиты, фазовращатель и блок сравненияфаз, первый вход которого подсоединен к выходу датчика перемещения,-а выход - к первомувходу фазовращателя, подключенного выходом кдополнительному входу усилителя, первые входыи выходы блоков моделирования инструмента иаиброзащиты соедщены с соответствующими выходами и входами блока оптимизации, второй вы.ход блока моделирования виброзащиты подклю.Фн ко вторым входам блока сравнения, фаэовра.щателя и блока сравнения фаз, а его второй итретий входы подсоединены соответственно к дат.чику сипы и ко второму выходу блока моделировання инструментаИсточники информации, принятые во вниманиепри экспертизе:1, Григанов А, С., Фролов К. В. Проблемы оценки влияния вибраций машин н инструментов . наорганизм человека-оператора. Сб. Колебания и устой.чивость приборов машин и элементов систем управления", М., Изд.во "Наука", 1968,2, Фролов К, В. Моделирование динамическихсостояний человека-онератора, подверженного виб.рационному воздействию. Труды семинара "Кибернетика электрических систем" по проблеме "Модели.рование динамических систем", Вын, 2, Брянск,1974, с. 79, рис. 4,3. Бутковская 3. М, и др, Исследование влияния вибраций машин и инструмента на руки человека-оператора при варьировании начальных усилий. Сб. "Виброизоляция машин и виброзащиты человека оператора", М "Наука", 1973.
СмотретьЗаявка
2149604, 27.06.1975
КАУНАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. А. СНЕЧКУСА
ОРЖЕКАУСКАС СТАСИС ИОНО, РАГУЛЬСКИС КАЗИМЕРАС МИКОЛО, СКУЧАС ИГНАС ЮОЗО
МПК / Метки
МПК: G06G 7/48
Метки: виброзащитных, моделирования, систем
Опубликовано: 15.05.1978
Код ссылки
<a href="https://patents.su/3-607239-ustrojjstvo-dlya-modelirovaniya-vibrozashhitnykh-sistem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования виброзащитных систем</a>
Блок-инструмент сборочного ротора

Номер патента: 1082604
Опубликовано: 30.03.1984
МПК: B23P 19/02
Метки: блок-инструмент, ротора, сборочного
...в конце сборки; на фиг. 6 - обойма; на 50фиг, 7 - то же, вид сверху,Блок-инструмент содержит смонтированные в корпусе 1 приводные верхний 2 и нижний 3 толкатели, установленные вертикально соосно один относительно другого. Верхний толкатель2 имеет цектрирующий подпружиненныйшток 4, а нижний толкатель 3 - центрирующую чашечку 5, Между толкателями 2 и 3 посредством распорок 6 расположен мехакиэм центрирования, выполненный в виде обоймы 7, разрезанной ка секторе, и стягивающего ихупругого кольца 8. При этом секторывыполнены с двухсторонними направленными к оси коническими срезамй 9 и 10 на внутренней поверхности и конической выемкой 11 на нижней торцовой поверхности. Корпус выполнен с коническим кольцевым уступом 12. Сектора обоймы 7...
Устройство для автоматической смены блоков инструмента в технологическом роторе роторной машины

Номер патента: 1147507
Опубликовано: 30.03.1985
Автор: Таныгин
МПК: B21J 7/16, B30B 11/12
Метки: автоматической, блоков, инструмента, роторе, роторной, смены, технологическом
...с помощью шестерен 6.Робот 1, имеющий три "руки" содержит приводной вал 7, установленный5,консольно в опорах, на котором смонтированы 3-позиционный блок 8, пневмоцилиндры 9 с поршнями 10, штоками3 1147511 и пневмораспределителем 12, электроколлектор 13, ведущую шестерню 6 иприводную шестерню 14, при этом наконцах штоков 11 поршней закрепленымагнитные вставки 4 для блоков, 5Автономный привод содержит электродвигатель 15 с редуктором 16, приводной вал 17, на котором смонтированы электроколлектор 18 для управления электромагнитами, включенными 1 Ов электрическую схему устройства,приводную шестерню 19, свободно сидящую на валу 17, и электромагнитнуюмуфту 20, взаимодействующую с приводной шестерней 19, при этом последняя 15сцеплена...
Устройство для моделирования блока передачи информации с амплитудно-импульсной модуляцией

Номер патента: 1427378
Опубликовано: 30.09.1988
Автор: Соколов
МПК: G06N 1/00
Метки: амплитудно-импульсной, блока, информации, моделирования, модуляцией, передачи
...9, На второй вход сумматора 13 поступает сигнал с регулируемого выхода генератора 14 шума, с помощью которого моделируются искажения сигналов под действием шумов в канале связи, Устройство работает следующим об,разом.При моделировании и исследовании искажений формы и амплитуды импуль 55 сов, модулированных по амплитуде при их многолучевом распространении, переключатель 8 устанавливается во втоНа фиг.2 показана временная диаграмма одного из возможных вариантовраспространения сигналов при многолучевом распространении. Как видно из диаграммы на фиг,2, основной сигнал, приходящий по первому лучу и растягиваемый по времени, искажает форму и амплитуду сигнала, приходящего повторому лучу,и т.д. Эти искажения накапливаются по всем лучам...
Устройство для сравнения сил токов двух цепей, измерения сопротивления и т. п.

Номер патента: 32624
Опубликовано: 31.10.1933
Автор: Конторович
МПК: G01R 17/00
Метки: двух, сил, сопротивления, сравнения, токов, цепей
...первое на две, а второе на четыре изолированных друг от друга части, и контактов в виде проволок, электрически соединенных попарно на вертикали и укрепленных на поворотном изолирующем стержне. При повороте последнего проволочные контакты перемещаются по вышеуказанным кольцевым; контактам и присоединяют сравниваемые цепи к телефону.На чертеже фиг. 1 изображает общий вид устройства; фиг. 2 - отдельно поворотный стержень; фиг. 3 - схему включения.На изолирующей доске 7 укреплено проводящее кольцо., разделенное на четыре изолированных друг от друга части 2, 3, 4, 5, присоединенные к зажимам, Над нижним кольцом на изолирующей пластинке расположено такого же диаметра верхнее кольцо, разделенное на две изолированных друг от друга части б,...
Устройство для защиты генератора от перегрева обмотки ротора

Номер патента: 1737608
Опубликовано: 30.05.1992
Авторы: Ванин, Неровний, Шмурев
МПК: H02H 5/04, H02H 7/06, H02H 7/08
Метки: генератора, защиты, обмотки, перегрева, ротора
...напряжения; блок 4 формирования сигнала, пропорционального току возбуждения (второй интегратор); блок 5 моделирования сигнала, пропорционального мощности тепловыделения, содержащего блок 6 пере- множителей и блок 7 усреднения сигнала (ФНЧ); блок 8 моделирования температуры в обмотке, содержащий сумматор 9; первый интегратор (цифро- аналоговый) 10 и блок 11 обратной связи; блок 12 экстраполяции температуры нагрева; блок 13 коррекции уставок на срабатывание; выходной блок 14, Блоки 5, 8, 12, 13, 14 объединены в блок моделирования теплового процесса в обмотке ротора.Устройство работает следующим образом.Напряжение в обмотке ротора 2 генератора 1 масштабируется преобразователем "Напряжение-напряжение" 3, в качестве которого...
Предыдущий патент: Устройство для решения задач теплопроводности
Следующий патент: Устройство для моделирования нелинейных колебательных систем
Случайный патент: Аппарат для непрерывной обработки нити