Привод коррекционных следящих систем резьбо-и зубообрабатывающих станков
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
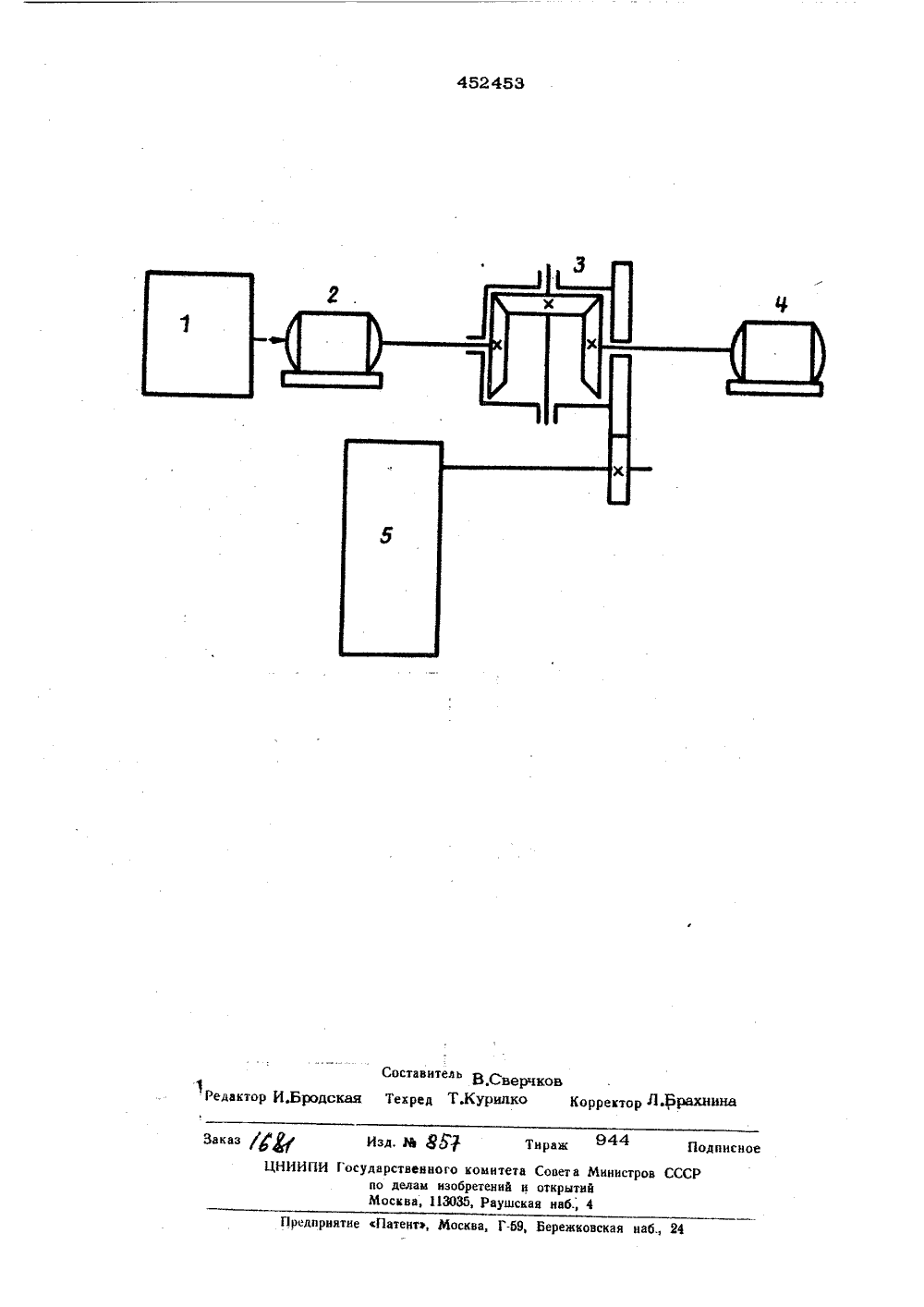
Лг1ф ОП ИСАНИЕИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(11) 4 )2453 1) Зави мое от авт. сви ио 18.05.72 етельств 1919.153/25 ки %22) За л.В 23 1 23/10 В 23 ф 5/10 оединеиием зая с приГасударственньй номнтеСоната Мнннетраа СССРпа делам нзобретеннйн отнрытнй т) Заявител:и и Экспериментальный научно-исследовстанков нститут тельский анков и инструменто нститут аллорежущих(54) ПРИВОД КОРРЕКЦИОННЫХ СЛЕДЯЩИХ СИСТЕМ РЕЗЬБО- И ЗУБООБРАБАТЫВАЮЩИХ СТАНКОВ ы электроприв истем резьбоов, выполненнь ды коррекционных зубообрабатывав виде преобраалоинерционным ренциала, устаИзвестиследящих с их станвателя,единенного электродви овленного В корре ие электр нг ошибка в цальный хаелем, и диффецепи обкат щих системах тают в районе нуля о имеет,синусоиой, зависящей от кционных следя приводы работ системе обычнактер с часто епи и скорост ных электропр ечувствитель иводо ности ая су вателе, котри частых ревер ного инусондал твительностиропускания значи- стемы его динам отрабатыв ески ьци атических ц тельно выш я,обработки материала.Недостатком известявляется наличие зоны нв тиристорном преобразо,тельно снижает полосу излектропривода, ухудшаегкачества, не позволяетличесие ошибки в кинемкоторые по частоте значикопленных и меньше по амплитуде,отработки таких ошибок привод должен иметьбольшую полосу пропускания в районе нуля.Цель изобретения - улучшение динамических свойств электропривода следящихсистем, работающих в районе нуля.Это достигается тем, что в кинематичес- ую цепь предлагаемого злектропривода введен вспомогательный электродвигатель, работающий с постоянной скоростью вращения, О и вспомогательный дифференциал, к одномуиз входов которого подсоединен в прямомнаправлении выходной вал малоинерционного.двигателя, ко второму входу в обратномнаправлении - вал вспомогательного двгп а теля и к выходу - основной дифференгп 1 апцепи обката .На тиристорный преобразователь нодаег-.ся постоянный сигнал, который вызываетпостоянное вращение малоинерционного элек- О тродвигателя со соростью, равной скорости вращения вспомогательного элетродвигателя в результате чего выходной вал.в системе, носящее синусоидальный харак 5 1 тор, в згом случае засгавляег работатьмалоинерционный двигатель не в районе нуля, а на фоне постоянной скорости, что значительно улучшает динамические характеристики электропривода.На чертеже изображена схема предлагаемого привода.Привод состоит из тиристорного преобразователя 1, который управляет малоинерционным электродвигателем 2 в фув ф нкции угла рассогласования в следящей системе, щВыход электродвигателя 2 соединен с одним из входов конического дифференциала ла 3, а с другой его вход - с валом вспомогательного электродвигателя 4 таким об-, разом, что скорости вращений обоих элек-1 бтродвигателей вычитаются и при равенстве их выходной вал дифференциала неподвижен.Выходной вал дифференциала 3 связан с исполнительным механизмом 5 через основ-ф ной дифференциал цепи обката,.Привод работает следующим образом.На вход тиристорного преобразователя 1 последовательно с сигналом ошибки подает-ся постоянный сигнал величиной, превыша 25 юшей максимальную амплитуду ошибки, При отсутствии сигнала ошибки малоинерционный электродвигатель 2 вращается с постоянной скоростью. На вспомогательный элекгродвигатель 4 подается напряжение такой величины, что он вращается со скоростью, равной скорости вращения коррекционного электродвигателя 2. Направления вращений обоих электродвш ателей выбраны таким об 35 разом, что при отсутствии сигнала ошибки на входе тиристорного преобразователи выходной вал дифференциала 3 неподвижен.Когда на вход тиристорного преобразователя поступает сигнал ошибки, носящий, как правило, синусоидальный характер, электродвигатель 2 отрабатывает их не в районе нуля, а на уровне постоянной скорости вращения. Это приводит к тому, что при отработке сигнала ошибки исключается переход через зону нечувствительности тиристорного преобразователя, что значительно новы шает полосу пропускания электропривода и значительно улучшает его динамические качества,Предмет изобретенияПривод коррекционных следящих систем резьбо- и зубообрабатываюших станков, выполненный в виде преобразователя, соединенного с малоинерционным электродвигателеми дифференциала, установленного в цепи обката, о т л и ч а ю ш и й с я тем, что, с целью улучшения динамических свойств, в кинематическую цепь введен ,вспомогательный электродвигатель с постоянной скоростью вращения и вспомогатель,ный дифференциал, к одному из входов которого подсоединен в прямом направлении выходной вал малоинерционного двигателя, ко второму входу в обратном направлении - , вал вспомогательного двигателя и к выходу - дифференциал цепи обката.Составитель црверчков1Редактор И.Бродская Техред Т.Курилко Корректор Л ина Заказ Тираж а, Г-б 9, Бережковская наб., 24 релприятие ен ЦНИИПИ Государственного комитета Совета Минпо делам изобретений и открытий Москва, 1 ИО 35, Раушская иаб., 4 Полписноистров СССР
СмотретьЗаявка
1919153, 18.05.1973
УКРАИНСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СТАНКОВ И ИНСТРУМЕНТОВ, ЭКСПЕРИМЕНТАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
СРИБНЕР ЛЕОНИД АНДРЕЕВИЧ, ШКОЛЬНИК МАРК БОРИСОВИЧ, МАКАРОВ ГЕННАДИЙ АЛЕКСАНДРОВИЧ, ТКАЧЕНКО НИКОЛАЙ ИВАНОВИЧ, ТАРАМЫКИН ЮРИЙ ПАВЛОВИЧ, БУРГОМИСТРОВ НИКОЛАЙ СТЕПАНОВИЧ, ЛОМОВЦЕВ БОРИС ИВАНОВИЧ
МПК / Метки
МПК: B23F 23/10
Метки: зубообрабатывающих, коррекционных, привод, резьбо-и, систем, следящих, станков
Опубликовано: 05.12.1974
Код ссылки
<a href="https://patents.su/3-452453-privod-korrekcionnykh-sledyashhikh-sistem-rezbo-i-zuboobrabatyvayushhikh-stankov.html" target="_blank" rel="follow" title="База патентов СССР">Привод коррекционных следящих систем резьбо-и зубообрабатывающих станков</a>
Преобразователь угловой скорости вала в частоту электрического сигнала

Номер патента: 1080177
Опубликовано: 15.03.1984
МПК: G08C 9/06
Метки: вала, сигнала, скорости, угловой, частоту, электрического
...повышение надежности преобразователя при работе в пыльной среде, при инее и росеПоставленная цель достигается тем, что в преобразователь угловой скорости вала в частоту электрического 40 сигнала, содержащий укрепленный на валу диск с прорезями, неподвижный источник светового потока, оптически связанный через прорези диска с неподвижным фотоприемником, введены 45 щетки и возвратные пружины, диск выполнен с радиально направляющими пазами с ограничителями перемещения, в радиально направляющих пазах установлены щетки, которые соедине ны с диском возвратными пружинаьы в радиальном направлении.На чертеже дана схема конструкции предлагаемого преобразователя.Преобразователь содержит источник 55 1 светового потока, фотоприемник 2,диск 3 с...
Двухкратноинтегрирующая система подчиненного регулирования скорости привода

Номер патента: 479208
Опубликовано: 30.07.1975
Авторы: Зубок, Орещенко, Развозжаева
МПК: H02P 5/06
Метки: двухкратноинтегрирующая, подчиненного, привода, скорости
...связи, пропорционально-интегральный регулятор 3 тока, преобразователь 4, двигатель б постоянного тока, датчик 6 тока якоря двигателя, датчик 7 скорости двигателя.Работает схема следующим образом.При отсутствии сигнала на входе ключа 2 последний находится в крайнем нижнем положении и подключает в цепь обратной связи регулятора 1 скорости нижний конденсатор. сли после того, как С 11 Р отработает сигнал задания скорости, к валу двигателя прикладывается статический момент нагрузки, на вход ключа 2 подается управляощии сигнал, например, с выхода датчика статического момента (на чертеже не показан), ключ 2 перебрасывается в верхнее положение и подключает верхний конденсатор в цепь обратной связи регулятора 1 скорости. 11 ри этом во время...
Устройство для стабилизации скорости вращения двигателя постоянного тока

Номер патента: 1270746
Опубликовано: 15.11.1986
Авторы: Димитрова, Матюхина, Михалев, Сидорук
МПК: G05D 13/62
Метки: вращения, двигателя, постоянного, скорости, стабилизации
...срабатыванием комраратора 4, обусловленным колебаниями скорости ы вращения двигателя 1 относительно заданной, вызываемыми флуктуацияии нагрузочного момента. Назначение элемента 10 ИЛИ заключается в предотвращении уменьшения кода ь . на выходе счетчика 9 ниже 2 -1 путем блокировки поступленияРимпульсов датчика 2 на вцчитающий вход счетчика 9 с помощью элемента 7 И. Тем самым предотвращается уменьшение ь ниже значений, соответствующих зоне нечувствительности двигателя 1 по входному напряжениюО и, как следствие, перерегулирование при переходе на более низкую заданную скорость вращения двигателя 1. Значение коэффициента Р компенсации зоны нечувствительности двигателя 1 может быть найдено как мини"мальное из всех целых Г ,...
Устройство для регулирования скорости привода грузоподъемной машины

Номер патента: 522783
Опубликовано: 25.07.1976
Автор: Жан
МПК: B66C 13/22
Метки: грузоподъемной, привода, скорости
...и подвиж,ной, связанной с якорем. М автоматической остаподъемной машины элекЯрмо 17 с обмоткой закреплено на корпусе 2 с помощью соединительного элемента 18, а нажимной диск 19 выполнен как одно целое с якорем 20.В устройстве имеются две фрикционные накладки 21 и 22, одна из которых вьшолнена как одно целое с якорем, а другая - с корпусом 2. Зти накладки размещены по обе стороны от тормозного диска 10.Устройство работает следующим образом.Весь узел привода грузоподъемной машины смонтирован на редукторе. Вал 5 сочленен с входной шестерней редуктора, а якорь 11 приводится во вращение с постоянной скоростью через шкив 14 и гибкую передачу 4 от приводного двигателя. Вращение выходного вала 5 обеспечивается путем подачи напряжения к...
Регулятор скорости вращения для микроэлектродвигателя постоянного тока

Номер патента: 884062
Опубликовано: 23.11.1981
МПК: H02P 5/16
Метки: вращения, микроэлектродвигателя, постоянного, регулятор, скорости
...процесс разгона двигателя. В начале разгона частота импульсов на входе преобразователя 5 резко уменьшается, так как между его входом и выходом датчика 1 теперь подключен делитель частоты 6 с коэффициентом деления К. Вследствие этого срабатывание порогового устройства 4 прекращается и на его выходе (точка д) устанавливается постоянный положительный потенциал, который поступает на вход схемы И 7, что обеспечивает протель 13. В режиме большой скорости, т, е, скорости порядка ста оборотов в сек, между датчиком 1 и преобразователем 5 подключается делитель частоты 6, инвертирующий 5выход которого, подсоединяется эа счет изменения положения переключателя 11 ко второму входу схемы И 7. Переключатель 12 также изменяет свое положение и...
Предыдущий патент: Механизм деления зубообрабатывающего станка
Следующий патент: Способ пайки деталей
Случайный патент: Способ получения бис-я-металлилкобальтхлорида