Контурная система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 359679
Авторы: Вознесенский, Чиннов
Текст
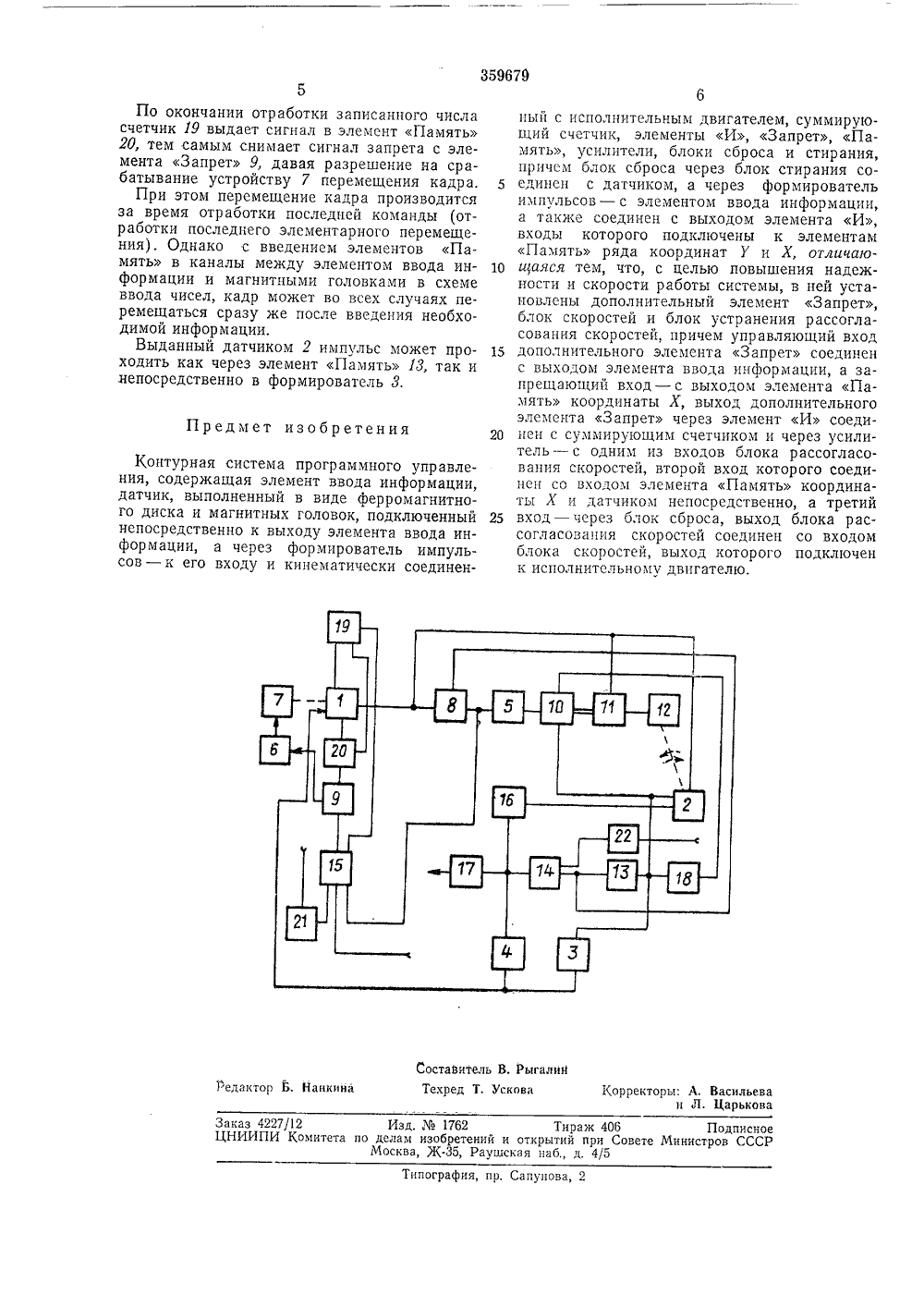
Союз Соеетоких Социалистических РеспубликЗаявлено 06,Х 11.1967 ( 1201732118-24)с присоединением заявкиПриоритетОпубликовано 21.Х 1.)972, Бюллетень3Дата опубликования описания 27.Х 11.1972 Комитет по делам изобретений и открытий При Сосете Министров СССР.Заявител КОНТУРНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИ 2 Изобретение относится к системам автоматического контроля и регулирования.Известны контурные системы программного управления, содержащие элемент ввода информации, датчик, выполненный в виде фер ромагнитного диска и магнитных головок, подключенный непосредственно к выходу элемента ввода информации, а через формирователь импульсов - к его входу и кинематически соединенный с исполнительным двига телем, суммирующий счетчик, элементы И, Запрет, Память, усилители, блоки сброса и стирания, причем блок сброса через блок стирания соединен с датчиком, а через формирователь импульсов - с элементом ввода 15 информации, а также соединен с выходом элемента И, входы которого подключены к элементам Память ряда координат У и Х.Описываемая система программного управления отличается тем, что в ней установлены 20 дополнительный элемент Запрет, блок скоростей и блок устранения рассогласования скоростей, причем управляющий вход дополнительного элемента Запрет соединен с выходом элемента ввода информации, а запре щающий вход - с выходом элемента Память координаты Х, выход дополнительного элемента Запрет через элемент И соединен с суммирующим счетчиком и через усилитель с одним из входов блока рассогласо вания скоростей, второй вход которого соединен со входом элемента Память координаты Х и датчиком непосредственно, а третий вход - через блок сброса, выход блока рассогласования скоростей соединен со входом блока скоростей, выход которого подключен к исполнительному двигателю,Такое выполнение позволило повысить надежность устройства и увеличить скорость его работы.На чертеже приведена блок-схема контурной системы программного управления.Она содержит элемент 1 ввода информации, датчик 2, формирователи импульсов 3 и 4, усилители 5 и б, устройство 7 перемещения кадра, элементы Запрет 8 и 9, блок 10 устранения рассогласования скоростей, блок скоростей 11, исполнительный двигатель (реверсивный привод) 12, элемент Память 18 координаты Х, элементы И 14 и 15, блок стирания 1 б, блоки сброса 17 и 18, суммирующий счетчик 19, элементы Память 20 и 21, элемент Память 22 координаты У.Устройство работает следующим образом, Элемент 1 ввода информации посылает сигнал в один из проводников тока датчика 2, работающего по принципу совпадения магнитной метки, записанной на периферии ферромагнитного диска датчика с нулевой магнитомодуляционной считывающей головкой,3выдающей импульс при вращении ферромагнитного диска в момент совпадения метки. Выданный датчиком 2 импульс формируется в формирователе импульсов 3 до формы и величины, достаточной для четкой метки на ферромагнитном диске датчика 2, и передается в элемент ввода информации, где подготовлен следующий объем информации при исполнении датчиком предыдущего объема информации, Сформированный и усиленный сигнал от элемента 1 ввода информации проходит в проводник тока датчика 2 и наносит на ферромагнитный диск метку, соответствующую объему перемещения данного кадра программы.Одновременно сигнал с элемента 1 ввода информации поступает на управляющий вход элемента Запрет 8 соответствующей координаты, затем усиливается усилителем 5 и подается в блок 10 устранения рассогласования скоростей и блок скоростей 11, сопротивления которых подключены последовательно. В это время на блоке скоростей 11 дежурит сигнал, пришедший с элемента 1 ввода информации и равный величине заданной скорости реверсивного привода 12, Усиленный сигнал, пройдя через соответствующее количество сопротивлений потенциометрического блока скоростей 11, обтекает обмотку реверсивного привода 12 с заданным уровнем напряжения, определяющим скорость двигателя; тем самым осуществляется дифференцирование скорости реверсивного привода 12. Пришедший в действие двигатель приводит во вращение датчик 2, механически с ним связанный, и работает до совпадения нанесенной магнитной метки со считывающей нулевой магнитной головкой. В момент совпадения метки с нулевой головкой подается сигнал в элемент Память 13. Став в рабочее положение, элемент 13 подает сигнал на запрещающий вход элемента Запрет 8, при этом снимается сигнал с усилителя 5 и соответственно со всей цепочки, питающей реверсивный привод 12. Движение по данной координате прекращается (если новое перемещение по этой координате равно нулю),Одновременно сигнал с элемента Память 13 дает разрешение блоку 10 устранения рассогласования скоростей ряда координат на учет величины рассогласования, а значит и подключения соответствующего количества сопротивлений (пропорционально степени перебега данной координаты относительно другой) последовательно сопротивлениям потенциометрического блока скоростей 11. Тем самым снижается напряжение на реверсивном приводе 12 данной координаты, а значит и снижается скорость отработки команды на следующем элементарном участке движения. По окончании отработки следующего элементарного участка сигнал от нулевой головки датчика 2 поступает в блок сброса 18, который осуществляет отключение сопротивлений блока 10 устранения рассогласования скоро 5 10 15 20 25 30 35 40 45 50 55 60 65 4стей и переводит элемент Память 13 в рабочее положение. Сигнал последнего разрешает ввод нового сочетания сопротивлений последовательно блоку скоростей 11, пропорционального величине перебега метки датчика 2,Тем самым устраняется рассогласование скоростей, определяемое величиной относительного перебега дисков - измерителей между сигналами нулевых головок узлов, работающих по различным координатам при помощи блока магнитных головок датчика 2.В момент срабатывания нулевых магнитных головок двух или ряда координат подаются сигналы в элемент И 14 посредством, например, элементов Память 13 и 22 от координат, например, Х и У, Сигнал с элемента 14 поступает в блок 16 стирания записи, блок сброса 17 и в формирователь импульсов 4.Блок стирания записи осуществляет стирание предыдущей записи на датчике 2 с помощью, например, подачи тока высокой частоты в обмотку универсальных головок. Блок сброса 17 приводит систему в исходное положение.Формирователь импульса 4 выдает сигнал для разрешения считывания программы с элемента 1 ввода информации с некоторой задержкой, позволяющей привести систему в исходное положение от блока сброса 17,В момент поступления сигнала на разрешающий вход элемента Запрет 8 он проходит к элементу И 15 для смены кадра элемента ввода информации. Вместо сигнала неработающих магнитных головок по другим координатам элемент ввода информации выдает сигнал, дежурящий на элементе Память 21, предусмотренный при составлении программы. С помощью этого сигнала открывается элемент И 15 и через разрешающий вход элемент Запрет 9 осуществляется смена кадра через усилитель б и устройство 7 перемещения кадра,С целью повышения разрешающей способности системы (точности отр аботки) путь между опорными точками аппроксимации делится, например, на десять элементарных перемещений и отрабатывается десять отрезков с устранением рассогласования скоростей на каждом отрезке посредством блока 1 О устранения рассогласования скоростей и ряда универсальных считывающих головок, расположенных по обе стороны нулевой считывающей головки датчика 2.Программа на количество повторений элементарных отрезков записывается, например, в двоичный суммирующий счетчик 19, работающий от импульсов, поступающих с логического элемента И 15. В данном случае задается команда с элемента 1 ввода информации на элемент Память 20, запрещающий сигнал поступает в элемент Запрет и смены кадров не происходит, а сигналы с элемента И 15 идут в счетчик 19.359679 Предмет изобретения СоставитЕль В, РыгаливТехред Т. Ускова Корректоры: Л. Васильева и Л. ЦарьковаРедактор Б. Нанкина Заказ 4227/12 Изд. Уо 1762 Тираж 406 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Ж, Раушская паб., д. 4/5 Типография, пр, Сапунова, 2 По окончании отработки записанного числа счетчик 19 выдает сигнал в элемент Память 20, тем самым снимает сигнал запрета с элемента Запрет 9, давая разрешение на срабатывание устройству 7 перемещения кадра.При этом перемещение кадра производится за время отработки последней команды (отработки последнего элементарного перемещения). Однако с введением элементов Память в каналы между элементом ввода информации и магнитными головками в схеме ввода чисел, кадр может во всех случаях перемещаться сразу же после введения необходимой информации,Выданный датчиком 2 импульс может проходить как через элемент Память 13, так и непосредственно в формирователь 3. Контурная система программного управления, содержащая элемент ввода информации, датчик, выполненный в виде ферромагнитного диска и магнитных головок, подключенный непосредственно к выходу элемента ввода информации, а через формирователь импульсов - к его входу и кинематически соединенпый с исполнительным двигателем, суммирующий счетчик, элементы И, Запрет, Память, усилители, блоки сброса и стирания, причем блок сброса через блок стирания со единен с датчиком, а через формировательимпульсов - с элементом ввода информации, а также соединен с выходом элемента И, входы которого подключены к элементам Память ряда координат У и Х, отличаю иаяся тем, что, с целью повышения надежности и скорости работы системы, в ней установлены дополнительный элемент Запрет, блок скоростей и блок устранения рассогласования скоростей, причем управляющий вход 15 дополнительного элемента Запрет соединенс выходом элемента ввода информации, а запрещающий вход - с выходом элемента Память координаты Х, выход дополнительного элемента Запрет через элемент И соеди нен с суммирующим счетчиком и через усилитель - с одним из входов блока рассогласования скоростей, второй вход которого соединен со входом элемента Память координаты Х и датчиком непосредственно, а третий 25 вход - через блок сброса, выход блока рассогласования скоростей соединен со входом блока скоростей, выход которого подключен к исполнительному двигателю.
СмотретьЗаявка
1201732
Ю. В. Чиннов, Б. Н. Вознесенский
МПК / Метки
МПК: G05B 19/16
Метки: контурная, программного
Опубликовано: 01.01.1972
Код ссылки
<a href="https://patents.su/3-359679-konturnaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система программного управления</a>
Устройство формирования сигнала управления фазовым положением блока вращающихся головок

Номер патента: 1277190
Опубликовано: 15.12.1986
МПК: G11B 5/48
Метки: блока, вращающихся, головок, положением, сигнала, фазовым, формирования
...которым одновибратор 7 переводится в состояние, при котором на его выходе устанавливается сигнал логической единицы. При несовпадении воспроизведенных и стробирующих импульсов сигналлогической единицы устанавливаетсяна выходе одновибратора 8,.при этомна входах элемента ИЛИ 12 устанавливаются сигналы логического нуля и навыходной шине 14 Формируется сигналкоманды на фазирование блока вращающихся головок, При совпадении воспроизведенных и стробирующих импульсов сигналом логической единицы свыхода одновибратора 7 через элементИЛИ 12 на вьгходной шине 14 формируется сигнал команды на прекращениеФаэирования блока вращающихся головок. При выпадении импульсов цветовой синхронизации в воспроизведенном сигнале на выходах одновибраторов 7 и 8...
Устройство для записи информации в оперативную память

Номер патента: 1322371
Опубликовано: 07.07.1987
МПК: G11C 7/00
Метки: записи, информации, оперативную, память
...первом выходе блока 6 сравнения формируется сигнал Больше, который подготавливает к открыванию элемент И 4. После опроса блока 12 дешифратором 15 в данном цикле начинает работать дешифратор 16. Импульс с первого выхода дешифратора6 открывает элемент И 4 и разрешает запись информации с выходов блока 12 в регистр 1. Импульс с второго выхода дешифратора 16 переписывает код счетчика 8 в регистр 7. Импульс с третьего выхода дешифратора 16 обцуляет счетчик 8 и начинается следующий цикл опроса выходов блока 12 дешифратором 15. В следующих циклах за счет движения носителя число, фиксируемое счетчиком 8, последовательно приближается к истинному числу пробивок данной информационной строки. Причем в каждом последукццем цикле это число счетчика 8...
Устройство для записи информации в оперативную память

Номер патента: 1005184
Опубликовано: 15.03.1983
Автор: Гладков
МПК: G11C 7/00
Метки: записи, информации, оперативную, память
...появляется двухразрядный код, представленный единицей только в одном разряде, В преобразовании этого кода принимаютучастие триггер 135, элемент И 136,триггер 158, на выходах 79, 88 которого формируется код У 4, У 4.Во время действия импульсов навыходах 42, 43 код от датчика 4 через триггер 135, элементы И 136,141 поступает на счетчик 142. Приправильной работе на контрольномвыходе 89 элемента И 149 появляетсясигнал, поступающий на элемент индикации 16 и в генератор 7, Код навыходах преобразователя 5 сохраняется до конца цикла работы блока 1.Генератор 7 работает только принажатии кнопки блока 6. Установкадвух дополнительных режимов работыдостигается с помощью счетчика 9.Изменение кодового состояния счетчика 9 происходит при считываниикода...
Устройство для ввода информации

Номер патента: 1695314
Опубликовано: 30.11.1991
Авторы: Босолаев, Воропаева, Гендельман, Зацепин, Невский, Рожков
МПК: G06F 13/00
Метки: ввода, информации
...режима осуществляется или посигналу "Начальная установка", или по сигналу синхронизации (вход 19 блока 1), или по коду адреса на входе 29 устройства.50 Режим диагностики блока 3 осуществляется путем записи в него диагностической информации УЦВМ, а также считывания диагностической информации в УЦВМ, при этом коды адресов записи и считывания,поступающие в устройство из УЦВМ, соответствуют кодам адресов диагностируемых ячеек памяти блока 3,Записьдиагностической информации вблок 3 происходит следующим образом. Из51015 УЦВМ на вход 29 устройства поступает код адреса у данного режима, который запоминается блоком 1. При этом с выхода 44 на вход 47 мультиплексора 33 поступает сигнал высокого уровня. Последний коммутирует сигнал с выхода 58...
Устройство для записи информации в оперативную память

Номер патента: 482805
Опубликовано: 30.08.1975
Автор: Гладков
МПК: G11C 7/00
Метки: записи, информации, оперативную, память
...кн ( нязяцня 31 н рс 5 ки 0)3 работы.Д:151 СНПЫ 1)яНН 51 Кодс) КООЗдицЛТ КяКОГО- либо квадрата координатной ссткп нсобходи5 о 15 мо совместить указатель датчика кодов 3 с данным квадратом, фа затем нажать кнопку датчика кодов 3.Ниже приводится порядок работы оператора при основных режимах работы,После установки режима записи кодов символов по адресу оператор считывает сначала код адреса в зоне адресов координатной сетки блока 2. Этот код из регистра координат 5 вводится в счетчик адреса 8. Затем оператор считывает код символа, который из регистра координат 5 вводится в регистр 7, а затем в память.После установки режима последовательной записи байтов оператор считывает сначала код начального адреса выоранного массива ячеек...
Предыдущий патент: Устройство для индикации
Следующий патент: Преобразователь углового положения вала в цифровой код
Случайный патент: Эмаль