Установка для динамической балансировкироторов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
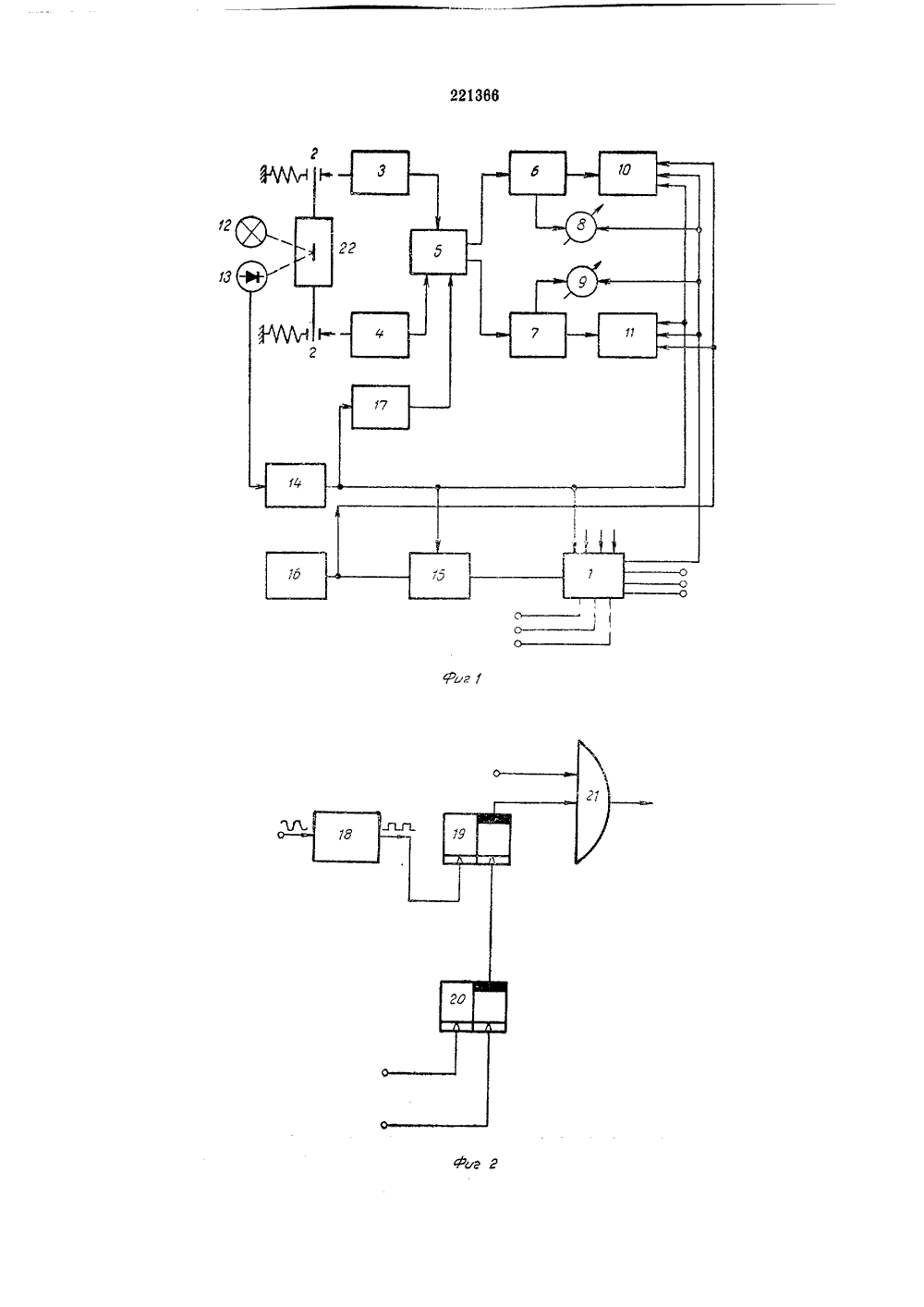
Союз Советских Социалистических Республикисимое от авт. свидетельства1150058/25-28 влено 24.1 т 7.1 с присоединением заявкиП 1, б 01 пт иоритет Комитет по деламобретений и открытийри Совете ИииистровСССР ДК 620.1.05:531.2 (088.8) Опубликовано 01.Ъ 11,1908. Бюллетень Ъ ця описания 23.1.1968 та 0 п олтКОВ АВторыизобретени В. 11, Минаев, В. А, Спирин, В, Х, Курнявко, 1 О. М. Мозжухин,. А, 1 Тронин, Н. Д. Нистратов, В. П, Дуранин и Б, М, Ковальский Л а 51 вите ч УСТАИОВКА ДЛЯ ДИНАМИЧЕСКОЙ БАЛАРОТОРОВ 2 Известны установки для динамической балансировки роторов на выбеге, содержащие блок управления, блок измерения величины неуравновешенности, блок измерения углового положения неуравновешенности, индукционные датчики и фотодцодный датчик, блок измерения скорости вращения и блок электрического эталонировация.Предложенная установка отличается от известных тем, что она снабжена кварцевым генератором и триггерным счетчиком, на входы которого подаются импульсы с кварцевого генератора ц опорные импульсы с фотодиодного датчика, а с Выхода, в период выбега, снимается импульс на блоки измерения величины и углового положения неуравновешенности, служащиЙ сцгнало.; для автоматической фиксации измеряемых величин, Блок измерения углового положения неуравновешенности выполнен в виде цифрового фазометра с использованием калиброванных импульсов с кварцевого генератора.Это позволяет повысить точность определения момента измерения, когда частота вращения ротора равна частоте настройки блоков цзмерсция величины и углового положения цеуравновец;енностц, а также повысить точность измерения углового положения неуравновешенности.На фиг. 1 приведена блок-схема описывасмой установки; на фцг. 2 - схема блокауглового положения неуравноВе 1 ЦСННОСГН.Установка состоит цз Олока 1 упра 1 вления, 5 подвижных опор 2, цчдукццоцных датчиков3 и 4, блока 6 настройки, избирательных усилителей 6 и 7, приборов 8 ц 9 показания величины неуравновешенности, блоков 10 и 11 измерения углового положения неуравнове- О шс;ности, лампы 12 подсвета, фотодцода 13,формирователя 14 опорных импульсов, блока 1 О измерения сОростц вращения, кварцевого генератора 16, блока 17 электрического эталонцровацця, формирователя 18, триггеров 5 19 ц 20, каскада 21 совпадения.Устацок: работает следющцз Обпазоз.Пусковь. устрОЙствох Олока 1 упраВлсциявключается питание привода уравновешцваемого изделия 22.О Перемещение подвижных опор 2 преобразуется шдукционными датчиками 3 ц 4 в электрцческцЙ сигнал, которыЙ через блок 6 настройки и пзоцрательные усилители 6 и 7 подается на приборы 8 ц 9 показания вели чины неуравновешенности ц на блоки 10 и 11измерения углового положения неуравновешенности.Посредством системы лампа 12 подсвета -фотодцод 13 метка, нанесенная на уравнове- О шпваемый ротор, преобразуется в электриче5 и 15 20 25 зо 35 40 ские импульсы, которые формируются в опорные импульсы формирователем 14 и подаются на блок 15 измерения скорости вращения. На другой вход блока 15 подаются импульсы с кварцевого генератора 1 б с частотой в 360 раз большей, чем частота настройки избирательных усилителей б и 7,Блок 15 работает так, что пока скорость вращения ротора меньше частоты настройки измерительной системы, на его выходе есть импульсы, а как только скорость вращения превысит ча.стоту настройки системы, импульсы пропадут, В этот момент блок 1 управления выключит привод уравновешиваемого изделия. С некоторой задержкой, которая задается блоком 1 начинается выбег уравновешиваемого изделия, Первый появившийся импульс на выходе блока 1 б является импульсом разрешения отсчета и посредством блока 1 производит фиксацию углового положения неуравновешенности на бло. ках 10 и П. Блок 17 эталонирования форми. рует из опорного импульса прямоугольный импульс, основная составляющая которого равна по величине и противоположна по фазе сигналу датчиков 3 и 4, Сигнал с датчиков и сигнал с блока 17 подаются на вход изби. рательных усилителей, создавая нуль измерительной системы, что как бы соответствует эталонному ротору.Работает блок измерения углового положения неуравновешенности следующим образом.Сигнал с избирательного усилителя б подается на формирователь 18, который формирует импульс тяжелого места и подает его на вход триггера 19. На один вход триггера 20 подается опорный импульс, на другой импульс разрешения отсчета. При появлении импульса разрешепия отсчета триггер 20 перебрасывается, а при появлении опорного импульса возвращается в исходное положение. 1 риггер 20 сигналом выхода перебрасывает триггер 19, который возвращается в исходное положение импульсом, сформированным из сигнала избирательного усилителя б.На выходе триггера 19 получается временной импульс, начало которого соответствует появлению опорного импульса, а конец импульса тяжелого места, На время действия этого импульса открывается каскад 21 совпадения, который пропускает импульсы от кварцевого генератора 1 б. Так как частота кварцевого генератора 1 б в 360 раз больше скорости вращения ротора, то число импульсов на выходе каскада 21 совпадения соответствует угловому положению неуравновешенности в градусах. Предмет изобретения Установка для динамической балансиоовки роторов на выбеге, содержащая блок управления, блок измерения величины неуравновешенности, блок измерения углового положения неуравновешенности, индукционные датчики и фотодиодный датчик, блок измерения скорости вращения и блок электрического эталонирования, отличающаяся тем, что, с целью повышения точности определения момента измерения, когда частота вращения ротора равна частоте настройки блоков измерения величины и углового положения неуравновешенности, а также повышения точности измерения углового положения неуравновешенности, она снабжена кварцевым генератором и триггерным счетчиком, на входы которого подаются импульсы с кварцевого генератора и опорные импульсы с фотодиодного датчика, а с выхода, в период выбега, снимается импульс на блоки измерения величины и углового положения неуравновешенности, служащий сигналом для автоматической фиксации измеряемых величин, а блок измерения углового положения неуравновешенности выполнен в виде цифрового фазометра с использованием калиброванных импульсов с кварцевого генератора.
СмотретьЗаявка
1150058
В. П. Минаев, В. А. Спирин, В. Курн вко, Ю. М. озжухик, В. А. Пронин, Н. Д. Нистратов, В. П. Дуранкн, Б. Ковальский
МПК / Метки
МПК: G01M 1/22
Метки: балансировкироторов, динамической
Опубликовано: 01.01.1968
Код ссылки
<a href="https://patents.su/3-221366-ustanovka-dlya-dinamicheskojj-balansirovkirotorov.html" target="_blank" rel="follow" title="База патентов СССР">Установка для динамической балансировкироторов</a>
Устройство для уравнивания угловых скоростей вращения синхронных генераторов

Номер патента: 951553
Опубликовано: 15.08.1982
Авторы: Альтшулер, Баумштейн, Борисов, Гареев, Хазанов
МПК: H02J 3/40
Метки: вращения, генераторов, синхронных, скоростей, угловых, уравнивания
...10 - ко второйдифференцируоцей цепи 12 и к входуэлемента НЕ 13, соединенного своимивыходами с дифференцирующей цепью14, выход которой подключен к одному из входов логического элементаИ-НЕ 15, другой вход которого соединен с выходом дифференцирующей цепи 11, а выход - с первым входомтриггера 8, вторым входом соединенным с выходом элемента И-НЕ 16, входы которого соединены соответственно с выходами дифференцирующих цепей 11 и 12. Выходы триггера 8 служат выходами блока 2 выбора направления.скольжения.На Фиг. 2 приведены временные диаграммы, соответствующие двум случаям синхронного несинфазного вращения генераторов. В первом случаенапряжение О опережает по Фазе наСпряжение О, а во втором - отстает по фазе от напряжения Ог,Для того, чтобы...
Генератор импульсов
Номер патента: 344572
Опубликовано: 01.01.1972
Авторы: Институт, Московский, Ордена
МПК: H03K 3/64
...другого транзистора непосредственно, отвод от первичной обмотки связали с коллектором первого 20 транзистора через второй развязывающий диод и балластный резистор, а со вторичнойорматора связан блок управВ исходном, положении транзистор 1 закрыт, транзистор 2 открыт. Величина резистора б достаточно велика и в таком положении не перегружает триггер. По части обмотки, подключенной к коллектору транзистора 2, идет токперемагничивающий сердечник трансформатора 3, Таким образом, в исходном положении сердечник перемагничен, и величина напряженности (В) определяется точкой а петли гисте 1 резиса,При поступлении отрицательного импульса на вход 8 (или положительного на вход 9) транзистор 1 открывается, транзистор 2 закрывается. При этом по...
Автоматический переключатель основного и резервного генераторов импульсов

Номер патента: 347915
Опубликовано: 01.01.1972
Автор: Каплан
МПК: H03K 17/16
Метки: автоматический, генераторов, импульсов, основного, переключатель, резервного
...импульсов киппреле 1 и 2 выбирается из условия обнаружения наихудшего сбоя декадного делителя (де- ЗО лптель делит на 9 или 11).Исходное состояние устройства 8 такое, что сигналы со входа 9, к которому подключен резерный генератор, проходят на схему 7 ИЛИ и далее на выход 10 преобразователя. Импульс с выхода устройства 8 поступает на схему б, запрещая прохождение импульса с выхода 10 на кипп-реле 2.Сигнал (см. фиг, 2 а) основного генератора, поступающий на вход 11, запускает кипп-реле 1, которое вырабатывает импульс (см. фиг. 2 б) длительностью (0,92 + 0,96)Т. Задним фронтом импульса кипп-реле 1 запускается киппреле 2 (см. фиг. 2 в) и устанавливается в единичное состояние триггер 3 (см. фиг, 2 г), Следующий импульс с входа 11 вновь...
Генератор импульсов для светолечения
Номер патента: 746869
Опубликовано: 05.07.1980
Авторы: Бабаянц, Калугин, Соляник
МПК: H03K 3/00
Метки: генератор, импульсов, светолечения
...световго импульса, содержа щего последовательно включенные резистор 26, неоновую лампу 27 и цепь времени, состоящую из резисторов и конденсатора 32, которые управляют временем зажигания тиратрона 33, в . анодную цепь которого включен импульсныйтрансформатор 34, поджигающий ксеноновую лампу 25 облучателя 5, Режим работы генератора устанавливается положением 15 " переключателя 35.Генератор импульсов для светолечения работает следующим образом.Вилка сети включается в розетку, затем включают конденсаторы 12-18 в требуемом сочетании, В положении А переключателя 35 включается питающеенапряжение и начинается заряд конденсатора 12 и включенных конденсаторов13-18. Зажигание ксеноновой лампы 25 25производится автоматически при...
Генератор импульсов
Номер патента: 790183
Опубликовано: 23.12.1980
Автор: Дубровский
МПК: H03K 5/01
...ИЛИ б и двухвходовой элемент И 7.Схема работает следующим образом, В режиме генерации парных импульсов переключатель 2 находится в нижнем положении (как показано на фиг.1), так что вход синхронизации генератора 3 соединен с выходом задающегогенератора 1, а выходная шина соеди иена с выходом элемента И 7. Период следования пар импульсов устанавливают задающим генератором 1 (фиг. 2 а), а время задержки между первым и вторым импульсом пары устанавливают 3 О равным периоду колебаний генератора 3. При этом осуществляется периодическая синхронизация генератора 3 импульсами задающего генератора 1 (фиг. 26), Длительность импульсов З задающего генератора 1 устанавливают больше длительности импульсов генератора 3. При этом Р 5-триггер 4...
Предыдущий патент: Стенд для балансировки
Следующий патент: Машина для испытания образцов материалов
Случайный патент: Способ получения производных -нафтоилглицина