Система управления технологическим процессом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
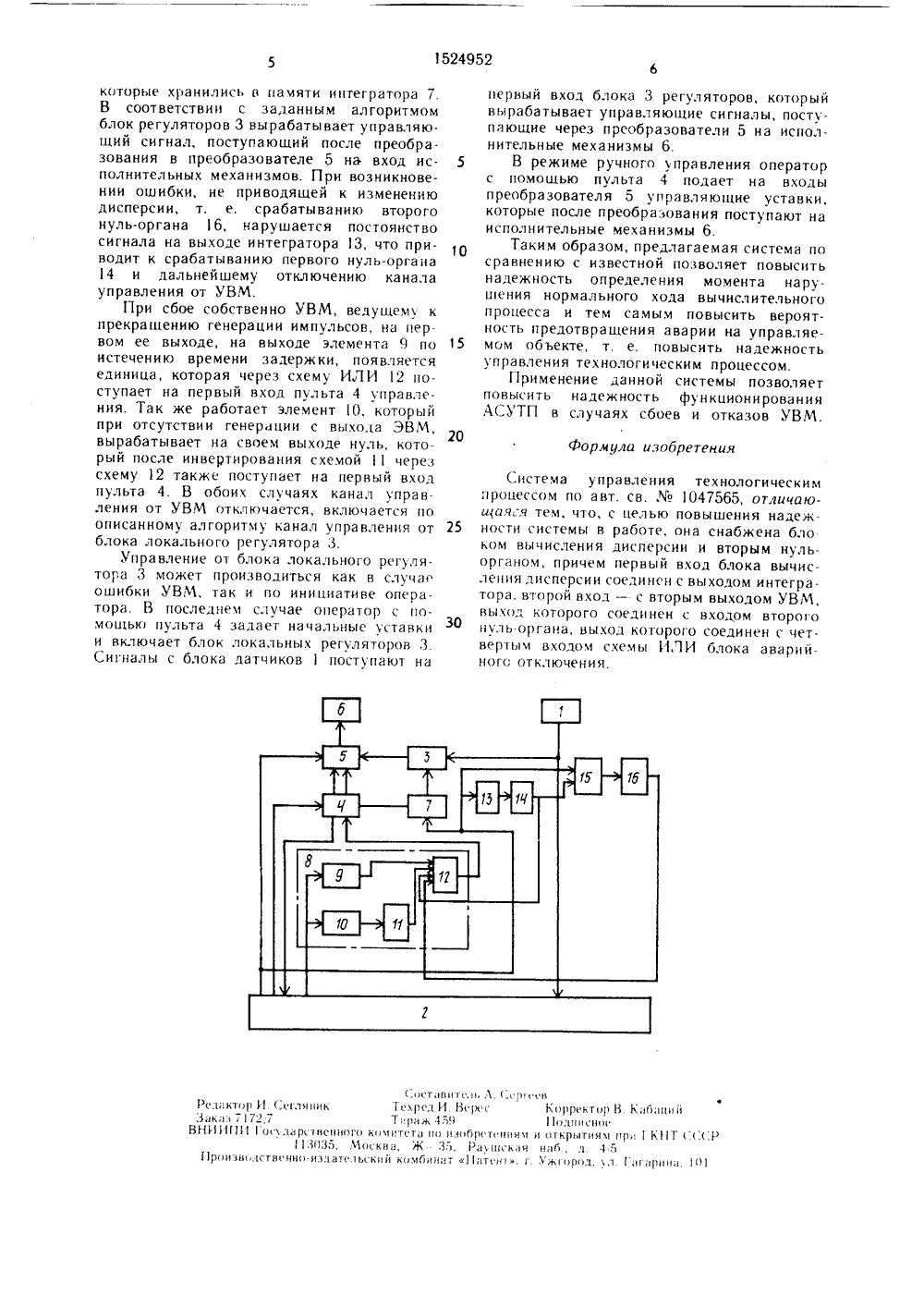
(71) Киевский институт автоматики им.Х ХЪ съезда К П С С(56) Авторское свидетельство СССР(ШСГП ретецис относится к автомдтизиросистелдм управления технологичесроцессами (ЛСУПТ) с помощью ющих вычислительных машин и может найти применение в ЛСУТП олосных станов горяцей прокатки Цель изобретения - повышение надежности рдботы системы.На чертсже представлена предлагаемаясистема управ.ения технологическим процессом.Система содержит блок 1 датчиковУВМ 2, блок 3 локальных регуляторов, пульт 4 управления, выходной преобразователь 5, блок 6 исполнительных механизмов, дискретный интегратор 7 с памятью, блок 8 аварийного отключения, содержа щий элемент 9 задержки на включение, элемент О задержки на отклюцение, схему НЕ 11 и схему ИЛИ 12, интегратор 13, первый нуль-орган 14, блок 5 вычисления;1 исперсии и второй нуль- орган 16, причем выход блока 1 датчиков ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР ОПИСАНИ К АВТОРСКОМУ ЯО 1524952(5 ) Изооретение относится к двтоматизированцым системдл упрдвлс ния технологическими процессами (АСУТП ) с помоцьк управляющих вычислительных мацин и может найти применсние в ЛСУТП широкополостных станов горячей прокатки. Цель изобретенияповышение нддежности рабгы системы. (.истема дополнительно сндб жена блоком вычисления дисперсии и цл,1 ьор 1;цом. Укд 1 н 1 е бки пгилякт конт роликвать измененс дисперсиуправляк ШсГ 0 СИГцдЛ; И ПО СС ОтЛИЧИК От Здддццой с рх допустимого предела в 1 рдбдтывдть сигнд, 0 наличии 01 иоки в системс. 1 ил. сО.,1 ицн с первыми вхо,сдл 1,Л В.Ч 2 и б,10 к 1 3 лскдльных ргллятср 011, второй вход УВЧ 2 соедис н с первым выходом пхльта 4 хпрдвлеция, второй и третий Выходь которсго соответственно соединены с первым и вторым входами выходного преобразователя 5, четвертый выход с первым входом дискретного интегратора 7, а первый ход с выходом блока 8 аварийного отключения, который является Выходом схемы И,1 И 12, первый вход которой соединен с выходом элемента 9 задержки на Вклкзцение, а второй - с выходом схемы НЕ 11, в;од которой соедицси с выходом элемента 10 задержки нд отклк- чсние, д входы элементов 9 и 10 задержки соединены с первым дылддом УВ,Ч 2, торсй ВХО ч которой сселисн с 1 р.тьи м Входом выходного преобразователя 5. четвертый вход которого соединен с выходом блскд 3 ,10 ка,1 ьцых регллят 01 ОВ, ВтогОЙ Выход УВ л 1 сое.инеи с в,одом интегратора 3, вход которого соединен со Входом первого нуль- органа4, Выход ксторго соединен сретьи м Входол хелы 11,111 2, пер 11 Й Вхсд с,ока 1, 1524952выцислеция дисперсии соединен с выходом интегратора 13, второй вход - со вторым выходом УВМ 2, а вьход - со входом второго нуль-органа 16, выход которого соединн с цтвертым входом схемы ИЛИ 12.Блок 15 вычисления дисперсии служит лля выцис,Иия дисперсии управляющего сигнала УВМ 2. Блок может быть реализован нз основе программируемого микропроцессора СМ 180 и содержит платы, с помощью которых можно реализовать арифметицскиопера(ии, содержащиеся в зависи. чости, цсприлр, на языке ФОРТРАН слелук) цш м нора зо м:Г)1 МЕХ 1 ОХ О, Х 1, ХМ, Х )=АКТ( (1) (.х) )м(Х 1- ХМ) )15 Ф 2),г,1 Х 1=Х текусце значение управляющего сигнала;М= Х срлнее значение управляюсцего сигнала.Второй нуль-орган 16 служит для фик. сирс)нсци 51 чочецтз появления на выходе блокз 5 выцисления лисперсии величины, превышаюцй .11 данную. Величина опорного нзцряжция выбирается из условия данного техцологицского процесса, т. е. связана с исхс)днс)11 дисперсией, например, подката цис 1 с)вой грушы клетей ШСГП, выбранных ,1,1 го р и ч о в у ц р з в.н и я и т. и.Ввод в систему блока вычисления дисперсии и н)с)рсгс) нуль-органа позволяет повысить н 11 лжцс)сть работы сист 11 зз счс.т новыииия налжност и исднтификзции неси)цсрх жцнй ошибки н 110 или сбоя УВМ ПЧТ 1 С)ПРЛ,11 НИЯ МС)ЧСЦТЗ ОТК.01 НИЯ ЛИСЦРСИИ Х ПРСВ,15 К)ГЦГс) СИГНаЛа ЦЗ НЛОПУС- тихун) н,цццц).Систчз рз ботает с.дующих образо ч.В УВМ зсрхжается прогрзмчцое обс сценисистчи.Гжич работы задается оператором с псчошьк) цу,ьтз 4 у правления. Оператором жввс),сятся цсхс)лцые лзнные прокатки: толцгинс и пирицз полосы, допуски, скорссть ирс)катки и т. и. Выбираются также постоянная интгрировзния интегратора 13, 111)рос и срзсз тывзция первого и второго цу,ь-оргзн)в4, 6.1 с)схстарт системы, УВМ 2 рассцит ь 1 и 3 с. т Лл 51 в ы б р 3 ц и ы х исхОдных д 3 и н ы х оптичз.ьцыусловия начальной настройки блока 3 лок;1,1 ьцых регуляторов, которые вылзк)тся цз пульт 4 по третьему выходу УВМ 2.В ис хсдсн) остоянии на выходзх интерзторз 13, блок 5 вычисления дисперсии, сирвогс и ворсго нх,ь-органов 14 и 6 нули. Втс)рой выход УВМ 2 полклюцец через выхс,тнс 1 цробрззовзтель 5 ко вхолу блс)кс 6 исполни.иых механизмов. Г 1 ри входпо- ,11 сы н .нш) лйствия блока лзтциков 1, нзцримр, в прокзтнук) клеть цистоной группы5 (О 5 20 2530 35 40 45 50 55 ШГСП, сигналы от датчиков поступают в УВМ 2 для обработки по заданным алгорит. мам, в результате чего УВМ выдает управ. лякиций сигнал, поступающий на третий вход преобразователя 5, откуда после преобразования, сигнал поступает на блок исполнительных механизмов 6, например, нажимные винты клети, направляющие линейки или другие механизмы. Одновременно управляющий сигнал поступает на вход интегратора 13 и первый вход блока 15 выцисления дисперсии. При нормальной работе на первом выходе УВМ появляется генерация последовательности импульсов, которые поступают на входы элементов 9 и 10 задержки. На выходе последних соответственно будут присутствовать логицеские нуль и единица, цто обусловлено наличием на входах элемнтов 9 и 10 сигнала с первого выхода УВМ 2. На выходе схемы 12 ИЛИ также - нуль, тзк как на всех ее цетырх входах нули, 1 ри нормальной (безошибоццой) работе УВК ца вход интегратора 13 и блока 15 поступают случайный сигнал с нормальным распределителем, в результате чего на выходе интегратора 13 устанавливается величина близкая к нулю или другая постоянная величина (цто опрлеляется конструкцией интеграторов), ца выходе блока 15 вычисления дисперсии также устанавливается некоторая постоянная величина, определяемая парачетрами процсса, конструкцией блока, реализхк)сцей про рзммы вычисления дисперсии. Опорные напряжения обоих нуль-органов 4 и 6 выбраны в соответствии с напряжениями нз выходах интгрзтора 13 и блока 15 при нормальной работе УВК.1 ри каких-либо ошибках в системе, в 1 зстнс)сти, цс)бцзруж нных ошибках СГ 10, норчзльцый закон распределения управляющих сигналов на выхол УВМ, может нарупитья, цто ведет к ) велицению дисперсии сигнала, т. . Напряжния на выходе блока 5. (При этом среднее значение кс)нтролирс)огс) сигнала может остаться не;1 зчеццым, т. е. сигнал на выходе интегратора 13 может оста ваться неизменным ), Кзк только величина сигнала на выхоле блока 15 нрс н,1 ит порог срабатывания второго цу,ь-орзцз 16, на выходе послдгн го возцикзт единица, которая поступат на цттнртый вхс)л схемы ИЛИ 12, единица с выхода котороо поступает далее в пульт 4 управления, котсрый отклюцзет канал управления сл УВМ и подключает канал управления от локальной системы. Единица с выхода схсл 1 И,111 12 попадает нз первый вход пульта 4, полклк)цат на второй вход вы холцого цробразовзтеля 5 выход локального ргул 1 торс 3. Управляющее воздействие в рсулятор 3 рассчитывается ца основании и:формации с блока датчиков 1, устзвок пультз 4, рзссцитаццых пуске системы, а тзкжуцрзвляюцтих сигналов УВМ, вылзвзчых в мсмент, пр лИествук)ший сбою и(:стсвите.ис с: пс свРеасктср И с;сгпннск 1 ссрел И Вс ее 1,сррслтср В. Каб;оси 1Закан 717,7 ;пак 45) 11 оаписноеВНИ 11111 Гос 1,аарственссого кчтета ио сасбрс тс ниич игкрытинч пр, К 1 Г с.(:с:Р11,Ю 35, Москва, Ж - З 5. Рас шсксн наб, и. 4 511 рсизво.сственнс.иа.са 1 епьский комбинат 11 тсн, г, окроа, сп Гаг;рин;с. 1 П которые хранились в памяти интегратора 7. В соответствии с заданным алгоритмом блок регуляторов 3 вырабатывает управляю. щий сигнал, поступающий после преобразования в преобразователе 5 на вход ис полнительных механизмов. При возникновении ошибки, не приводящей к изменению дисперсии, т. е. срабатыванию второго нуль-органа 16, нарушается постоянство сигнала на выходе интегратора 13, что приводит к срабатыванию первого нуль-органа4 и дальнейшему отключению канала управления от УВМ.При сбое собственно УВМ, ведущему к прекращению генерации импульсов, на первом ее выходе, на выходе элемента 9 по 5 истечению времени задержки, появляется единица, которая через схему ИЛИ 12 поступает на первый вход пульта 4 управления. Так же работает элемент О, который при отсутствии генерации с выхода ЭВМ, вырабатывает на своем выходе нуль, который после инвертирования схемой 11 через схему 12 также поступает на первый вход пульта 4. В обоих случаях канал управления от УВМ отключается, включается по описанному алгоритму канал управления от 25 блока локального регулятора 3.Управление от блока локального регулятора 3 может производиться как в случае ошибки УВМ, так и по инициативе оператора. В последнем случае оператор с помощьк пульта 4 залает начальные уставки и включает блок локальных регуляторов 3. Сигналы с блока датчиков 1 поступают на первый вход блока 3 регуляторов, который вырабатывает управляющие сигналы, поступающие через преобразователи 5 на исполнительные механизмы 6.В режиме ручного управления оператор с помощью пульта 4 подает на входы преобразователя 5 управляющие уставки, которые после преобразования поступают на исполнительные механизмы 6.Таким образом, предлагаемая система по сравнению с известной позволяет повысить надежность определения момента нарушения нормального хода вычислительного процесса и тем самым повысить вероятность предотвращения аварии на управляемом объекте, т. е. повысить надежность управления технологическим процессом.Применение данной системы позволяет повысить надежность функционирования ЛСУТП в случаях сбоев и отказов УВМ. Система управления технологическим процессом по авт. св, Мо 1047565, отличаюиая:я тем, что, с целью повышения надежности системы в работе, она снабжена бло ком вычисления дисперсии и вторым нуль органом, причем первый вход блока вычис. пения дисперсии соединен с выходом интегратора. второй вход - с вторым выходом УВМ, выход которого соединен с входом второго пуль-органа, выход которого соединен с четвертым входом схемы И,г 1 И блока аварийного отключения.
СмотретьЗаявка
4431586, 30.05.1988
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
КУЗИН ВАСИЛИЙ АЛЕКСАНДРОВИЧ, СБИТНЕВ АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: B21B 37/00
Метки: процессом, технологическим
Опубликовано: 30.11.1989
Код ссылки
<a href="https://patents.su/3-1524952-sistema-upravleniya-tekhnologicheskim-processom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления технологическим процессом</a>
Защитно-герметический блок входа

Номер патента: 367227
Опубликовано: 01.01.1973
Авторы: Ануфриев, Илюкнн, Кашкинов, Кудр, Лугачев, Маштаков
МПК: E06B 5/10
Метки: блок, входа, защитно-герметический
...естен за нитпо-Гсрд я, В е.1 к) ч 13 н) и)и Й и 0 г 0 т н 0НСРСГОРОДЕ(, ОПОРНО РДР с 1 И Ванн 51.Ц(.Л Ь И 300 Р С ТЕ 1 1 51 еР)л:ы 1 , В еОГОРьс 13.(од 51 Г елиноь(. 31- ПОРЫ с).1 протиоположной от петель стороне01 ОР)51 )Л:(Л .Т СЕОС О ГГМОС(.;15 и С 15 -5 00,БОГО 130.3 ГермстичноЙ нсрсГороде Брн0 Г 1)Л 1 с 111;1;3;11, ) 13 Л 1;11О 1,; Л1 ОС 11 и я 5),1(:с(е Го м В 0 лоее 5113 г не Гся н 0 г От н О:1 В(. р н, н л и Я п р Я ВГ 1 500 и и ( и л г ь 1 0 е 0- ТОРОВ, Бзс 1 ИМОДСИСТ 310011 с С БПНТ 013 Ы.131 10 с пораи а, нй;1 сижно нс 130 н 311 ется Г(рмсти 111;51С Р (0 Р 0 Д Е (111,10 ГВО д 1 ер; посре:1 ст 30 пете;1 ь 7 н;113(НП 11)с 1 ЮТ И 1 ОПОРН) 10 РЛ 1 У с), Г 111 ГОДЛР 5 Е) 11)0 С.ОДТ 0 1 Е)ьс 31(.Зс 1 ЕРЬ 31(. РО(М(1.15 3 с 1 Д р...
Способ компенсации дрейфа нуля интегратора при интегрировании периодического сигнала без постоянной составляющей

Номер патента: 873249
Опубликовано: 15.10.1981
Авторы: Россо, Рудаков, Столяров
МПК: G06G 7/186
Метки: дрейфа, интегратора, интегрировании, компенсации, нуля, периодического, постоянной, сигнала, составляющей
...подаются на.инвертирующий вход интегратора 1. Выход интегратора873249 Формула изобретения Заказ 9049/75 Подписное соединен с коммутирующим ключом 2, который через диоды 8 и 9 соединен с инвертирующими входами интеграторов б и 7 дрейфа нуля. Параллельно интеграторам б и 7 дрейфа нуля включены коммутирующие ключи 3 и 4. Выходы интеграторов б и 7 дрейфа нуля подключены на инвертирующий вход операционного усилителя 10.Способ осуществляется следующим образом. ОНа инвертирующий вход интегратора 1 подается сигнал. На выходе, после выполнения операции интегрирования к полезному сигналу добавляется сигнал, пропорциональный интегралу от дрейфа нуля. для выявления составляю з щей, обусловленной дрейфом, выходной сигнал через коммутирукарсй...
Электропривод переменного тока

Номер патента: 1628125
Опубликовано: 15.02.1991
МПК: H02H 7/085
Метки: переменного, электропривод
...25 порога срабатывания компаратора 27, последней, и выпает сигнал через логический элемент 11 ЛИ на управляющий вход размыкател 1 (фиг,2, эпюра К)который отю ючает выпрямитель 3 от трехфазного генератора переменного напряженияТаким образом, повышение надежности электропривода переменного тока при срабатывании устройства токоограничеиия и температуре силовых транзисторных ключей в момент срабатывания устройства токоограничения 05-09 от максимально допустимой для силового транзисторного ключа осуществляется за счет уменьшения времени срабатывания ус-.ройства ограничения времени работы устрсйст:,з токо- ограничения пропорционально увеличению температуры силовых транзисторных ключей. 1 О чальной уставки, определяющей макси мальное время...
Модель адаптивного нейрона

Номер патента: 765823
Опубликовано: 23.09.1980
Автор: Редин
МПК: G06G 7/60
Метки: адаптивного, модель, нейрона
...к величине порога управляющего воздействияотрабатываемого блоком адаптации со,скоростью, определяемой постояннойвремени блока адаптации,Выходной сигнал блока адаптациипреобразуется вторым блоком управления пластичностью в величину ему обратную, которая и изменяет вес синапсов.На чертеже дана схема моделирова-.ния адаптивного нейрона,Он а содержит входы у строй ст в а 1,1 вход 2 управляющий изменением длительности периода возбуждения, блок адаптации 3, первый блок 4пространственного суммирования первый блок 5 нременного суммирования,блок 6 сравнения, выходной интегратор 7, выход устройства 8, блоки 9,91 9 моделирования синапсавторой блок 10 пространственного суммирования, второй блок 11 временногосуммирования, первый блок 12...
Устройство для контроля автоматической телефонной станции

Номер патента: 1584118
Опубликовано: 07.08.1990
Авторы: Гольденштейн, Жарков, Старжинский, Фукс
МПК: H04M 3/22
Метки: автоматической, станции, телефонной
...под действием тактовых импульсов ТИ 2 вырабатывает последовательность команд, необходимых для установления соединения между абонентами и поэтапного контроля проверяемой станции.В анализатор 24 линейных сигналовПоступают следующие команды, Формируемые блоком 11 управления: "Отбой"11И Занятие - на шестые входы команФ5ды набора номера в виде инФормации оцроключении соответствующих групповыхКнопок тастатуры имитатора 12 ("ГрА"или "ГрБ") - на седьмые вхоцы, команда включения датчика неисправностиВкл.ДН - на пятый вход.По команде Занятие", действующейна все время установления соединения,включая проверку разговорного тракта,обеспечивается замыкание шлейфа линии 151Имитатором 12 вызывающего абонентаИ разрешается выдача иэ анализатора23...
Предыдущий патент: Устройство уравновешивания шпинделей привода клети прокатного стана
Следующий патент: Устройство для регулирования раствора валков прокатного стана
Случайный патент: Скользящая опалубка