Интерполирующее устройство для систем программного управления фрезерным станком
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 119054
Авторы: Васильев, Дубковская

Текст
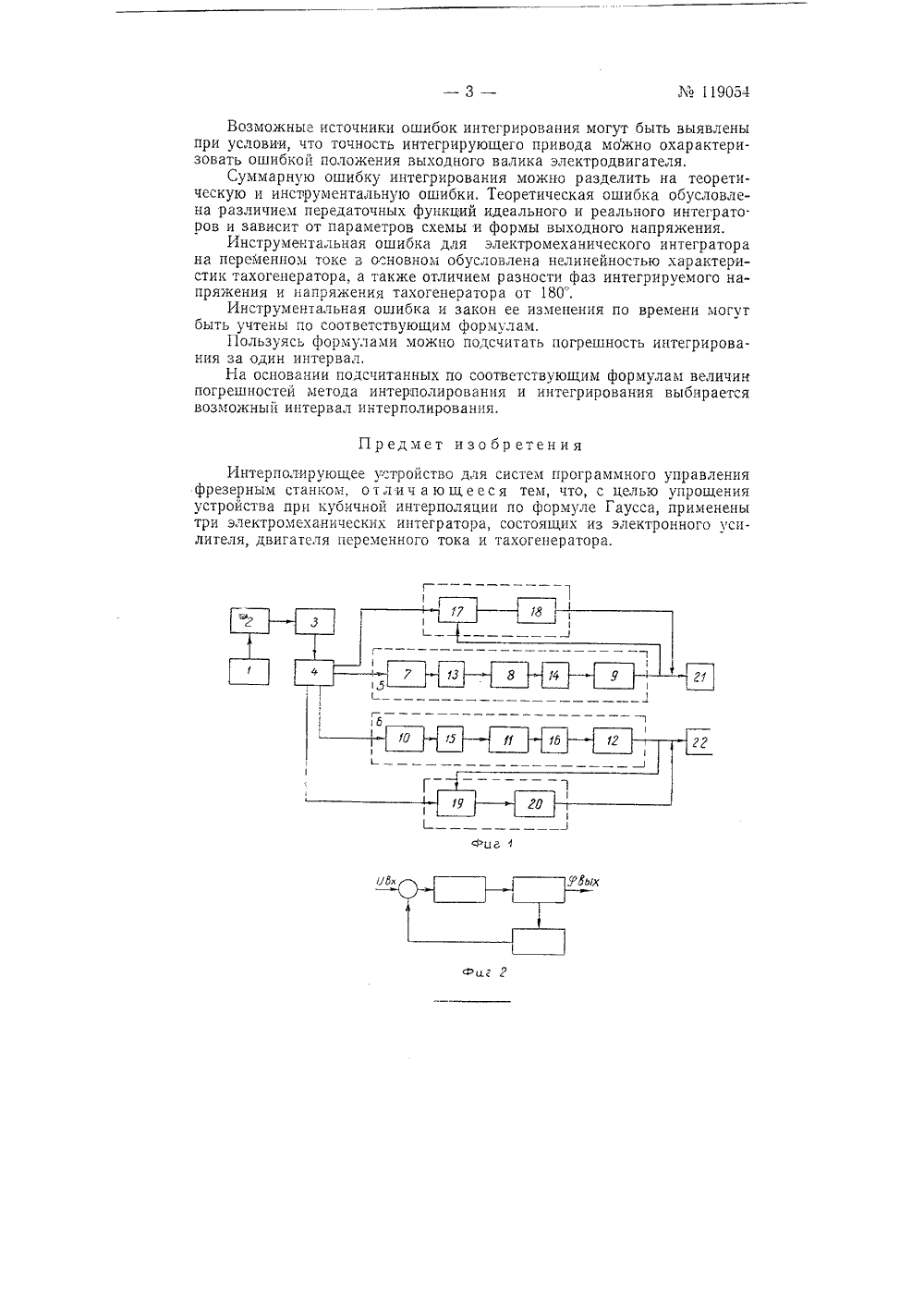
. в;. НИЕ ИЗОБР СКОМУ СВИДЕО ТЕ ТВУ В убковская Д. В. Васильев и И НТЕР ПОЛ И РУОЩЕЕ УС ОГРАММНОГО УПРАВЛЕ ИСТВО ДЛЯ ФРЕЗЕРНЫ ИСТЕМ СТАНКО и изобретений/25 в Комитет по д е Министров СССР Заявлено 19 июля 1958 г, за6043 и открытий при Совубликовано в Бюллетене изобретений1959 г. Отличительная особенность описываемого ниже интерполирующего устройства, предназначенного для систем программного управления фрезерным станком, заключается в применении трех электромеханических интеграторов, состоящих каждый из электронного усилителя, двигателя переменного тока и тахогенератора.Предлагаемое интерполирующее устройство предназначено для производства интерполяции согласно формуле Гаусса,По сравнению с другими формулами формула Гаусса после некоторых преобразований приобретает вид, более удобный для построения на ее основании интерполирующего устройства. Формула Гаусса для интерполирования по четырем точкам может быть реализована с помощью трех интеграторов, причем при переходе от одного интерполяционного интервала к другому на вход первого интегратора нужно подавать новую величину подинтегральной функции, тогда как на двух других интеграторах они устанавливаются автоматически, Тем самым значительно упрощает я устройство и сокращается количество необходимой информации.При использовании других формул этого преимущества не имеется, так как после каждого интервала нужно вводить подинтегральптяе значения функций на все три интегратора сразу.На фиг. 1 изображена скелетная схема интерполирующего устройства; на фиг, 2 - структурная схема электромеханического интегратора.Изображенная на фиг, 1 скелетная схема интерполирующего устройства разработана для управления по заданной программе двумя подачами фрезерного станка. На схеме приняты следующие обозначения: 1 - устройство для ввода независимой переменной; 2,3,4 - программирующее, читающее и запоминающее устройства; 5, б - интерполяторы;7, 8, 9, 10, 11, 12 - интеграторы; 13, 14, 15, 1 б - вращающиеся трансформаторы; 7, 19., - схемы сравнения; 18, 20 - следящие системы;21, 22 - сельсины.Програмчщрующее устройство пред"тавляет,собой перфорированную ленту с нанесенными на ней в двоичном коде значениями разностейтретьего порядка и координат опорных точек. За независимую переменную принимается текущее время, Вводится оно в программирующееустройство при помощи электродвигателя со стабилизированной скоростью,Читающее устройство содержит фотоэлементы, которые считываютсигналы, зарегистрированные на перфорированной ленте.Код числа, полученный в читающем устройстве, преобразуется вэлектрическое напряжение и запоминается в соответствующем устройстве, Преобразование кода числа в напряжение производится с помощьюсчетчика и электромагнитных реле.Собственно интерполятор состоит из трех электромеханических интеграторов. С выходными валиками интерполяторов связаны ссльсинь;.Сигналы с однофазных обмоток сельсинов записываются на магнитную ленту, которая затем является программирующим элементом дляуправления станком.В тех случаях, когда интерполирующее устройство находится устанка, результаты интерполирования поступают непосредственно в следящие "истемы, управляющие подачами. Задачей корректирующей системы является устранение погрешностей из подинтегральной функциитретьего интегратора и выхода в конце каждого интервала интерполирования.Корректирующее устройство содержит электронную схему сравнения и следящую систему, Так как известны значения координат опорныхточек обрабатываемой поверхности, то можно произвести сравнение желаемой величины и полученной на выходе.В конце каждого интервала интерполирования из запоминающегоустройства на схему сравнения корректирующего устройства подаетсявеличина напряжения, пропорциональная координате опорной точки.Туда же поступает напряжение от линейного потенциометра, связанногос выходным валиком интерполятора, пропорциональное углу поворотавыходного валика интерполятора.Корректирующее устройство с помощью следящей системы полученную поправку вводит в подинтегральную функцию третьего интегратораи на выход.Погрешность в подинтегральной функции второго интегратора отсутствует, так как третья разность, вводимая на вход первого интегратора, берется с учетом возможной погрешности, Для этой цели строитсярасчетным путем или снимает я экспериментально семейство кривых,выражающих зависимость утла поворота в функции времени о- дляразличных входных напряжений. Пользуясь этими кривыми, можно выбрать необходимое С,пропорциональное третьей разности, так, чтооыв конце интервала интерполирования получить на выходе треоуемыйугол поворота,В случае, если обрабатываемое изделие ограничено прямыми линиями, то программирование нужно производить с помощью только одного интегратора, вводя на его вход первые разности,Точность работы интерполируюшего устройства в основном определяется точностью работы интеграторов.Структурная схема электромеханического интегратора представлена на фиг, 2,М 119054Возможные источники ошибок интегрирования могут быть выявлены при условии, что точность интегрирующего привода можно охарактеризовать ошибкой положения выходного валика электродвигателя,Суммарную ошибку интегрирования можно разделить на теоретическую и инструментальную ошибки. Теоретическая ошибка обусловлена различием передаточных функций идеального и реального интеграторов и зависит от параметров схемы и формы выходного напряжения.Инструментальная ошибка для электромеханического интегратора на переменном токе в основном обусловлена нелинейностью характеристик тахогенератора, а также отличием разности фаз интегрируемого напряжения и напряжения тахогенератора от 180.Инструментальная ошибка и закон ее изменения по времени могут быть учтены по соответствующим формулам.Пользуясь формулами можно подсчитать погрешность интегрирования за один интервал,На основании подсчитанных по соответствующим формулам величин погрешностей метода интерполирования и интегрирования выбирается возможный интервал интерполирования.Предмет изобретенияИнтерполирующее устройство для систем программного управления фрезерным станком, о т л и ч а ю щ е е с я тем, что, с целью упрощения устройства при кубичной интерполяции по формуле Гаусса, применены три электромсханических интегратора, состоящих из электронного усилителя, двигателя переменного тока и тахогенератора.Фиг 1Фиг Р
СмотретьЗаявка
604396, 19.07.1958
Васильев Д. В, Дубковская А. Г
МПК / Метки
МПК: G06G 7/30
Метки: интерполирующее, программного, систем, станком, фрезерным
Опубликовано: 01.01.1959
Код ссылки
<a href="https://patents.su/3-119054-interpoliruyushhee-ustrojjstvo-dlya-sistem-programmnogo-upravleniya-frezernym-stankom.html" target="_blank" rel="follow" title="База патентов СССР">Интерполирующее устройство для систем программного управления фрезерным станком</a>
Устройство соединения интеграторов

Номер патента: 146097
Опубликовано: 01.01.1962
Автор: Неслуховский
Метки: интеграторов, соединения
...схему Вб, Перед вводом каждого переполнения код в данном разряде регистра гасится. Гашение выполняется вентильной схемой Вб через запрещающий вход, Выбор переполнений ЛХ и ЛУ при такой системе построения программного управления производится так же, как и в большинстве ЦДА по адресам АЛХ и АЛУ. Выборка из регистра РЛ 5 приращений ЛХ и ЛУ осуществляется с помощью вентильных схем В 2, ВЗ и В 4.В схемах на фиг. 2, 3, 4 и 5 набор кодов каждого адреса производится коммутацией временных импульсов ВИ (1, 2, 3 и - 2, и - 1, п). Временные импульсы выбираются по номерам разрядов, имеющих коды 1 Выбор кодов для каждого интегратора во времени производится вентильными схемами В 1, В 2 ВУ - 1, ВЛ, управляемых от выходных шин коммутатора,...
Устройство для оценки интервала корреляции нецентрированного случайного процесса

Номер патента: 641463
Опубликовано: 05.01.1979
Авторы: Волков, Мотов, Семенычев, Токарев
МПК: G06G 7/19
Метки: интервала, корреляции, нецентрированного, оценки, процесса, случайного
...4, второй сумматор 5,ключ 6, первый блок вычитания 7, второй блок вычитания 8, блок умножения 9, блок усреднения 10, широтно-импульсный модулятор 11, регистрирующийблок 12.Ко входу устройства подключен входфильтра 1, неинвертируюший вход блокавычитания 7, второй вход сумматора 5.Выходы фильтров нижних частот подключены через блок задания масштабных коэффициентов 3 к й входам суммато 55 ра 4, выход первого фильтра нижнихчастот подхлючен также к инвертируюшему входу блока вычитания 7, выход последнего фильтоа нижних частот подключен также через инвертор 2 и блокзадания масштабных коэффициентов 3 к( п +1) входам сумматора 4, К выходуинвертора 2 подключен первый вход сумматора 5, выход которого через ключ6 подключен к инвертирующему...
Устройство преобразования временного интервала в код

Номер патента: 1785072
Опубликовано: 30.12.1992
Автор: Ермаков
МПК: H03M 1/50
Метки: временного, интервала, код, преобразования
...третьего регистра 19, вход установки в ноль которого соединен с выходом третьего регистра 19, вход установки в ноль которого соединен с входом занесения третьего регистра 19, вход установки в ноль которого соединен с выходом третьего элемента 20 2 ИЛИ, второй вход которого через первый элемент 16 НЕ соединен с выходом первого элемента 2 2 И,выход которого через второй элемент 21 НЕ соединен с входом установки в единицу второго ВЯ-триггера 14, вход установки в ноль которого объединен с первым входом третьего элемента 20 2 ИЛИ, входом установки в ноль и первым управляющим входом сдвигового регистра 18 и является шиной 8 СБРОС, второй вход первого элемента 6 2 ИЛИ, через третий элемент 22 НЕ соединен с выходом старшего разряда...
Устройство фазирования временного интервала с тактовыми импульсами

Номер патента: 1328931
Опубликовано: 07.08.1987
МПК: H03K 5/153, H03K 5/156
Метки: временного, импульсами, интервала, тактовыми, фазирования
...на,цвоичном счетчике и дешифраторе.Формирователь 1 вырабатывает по заднему фронту тактовых импульсов, поступающих на вход 8, на своих Я. выходах сдвинутые одна относительно другой на период Т импульсные последовательности, длительность импульсов в которых также равна Т,До тех пор, пока на шине 7 источника импульсов временного интервала отсутствует сигнал, П-триггеры 2 находятся в состоянии "О", запрещающем прохождение импульсных последовательностей через элементы И 3.При возникновении временного интервала на информационных входах П- триггеров 2, они последовательно, по мере поступления на их синхровходыимпульсов с выходов формирователя 1,устанавливаются в состояние "1"(фиг,2, диаграммы 2-12-4), темсамым разрешая прохождение через...
Устройство для определения интервала времени

Номер патента: 1661716
Опубликовано: 07.07.1991
Авторы: Бантюков, Бантюкова, Голуб, Ковалев, Осокин, Соляник
МПК: G04F 10/04
...45 50 55 мании, например к устройству индикации. В этом случае при наличии сигнала на шине 26 разрешается индикация кода периода (частоты) импульсовисследуемой последовательности с шин25 или сигнала с шины 27,Устройство для определения интервала времени работает следующим образом.В исходном состоянии на второмвыходе блока 10 управления имеетсяединичный сигнал, удерживающий внулевом положении счетчики 2 и 7 импульсов и триггеры 5 и 9, импульсыэталонной частоты с первого выходаблока 10 управления поступают натактовый вход триггера 5 и черезэлемент И 1 - на тактовый вход счетчика 2 импульсов (однако триггер 5и счетчик 2 импульсов остаются внулевом положении), на инФормационную шину 11 поступают импульсы исследуемой...
Предыдущий патент: Патрон для двухступенчатого сверла
Следующий патент: Способ обработки глобоидных поверхностей тел вращения
Случайный патент: Теплоизоляционный материал