Вакуумный захват
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1070112
Авторы: Артоболевский, Мишнин, Толстов



Текст
(19) 01) 011 д 1) В 66 С 1/О РЕТЕНИЯ олст льство С /02, 1974 протоЗАХВАТ й, вакуумоодер- азуюГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ИСАНИЕ ИЗ К АВТОРСКОМУ СВИДЕТЕЛЬСТ(54) (57) ВАКУУМНЫЙжащий корпус с рукоятк камеру с упругой диафрагмой, закрепй на подпружиненном штоке, который овлен подвижно относительно корпуса, ксатор вертикального положения штотличающийся тем, что, с целью повыя удобства в эксплуатации, он снабзакрепленными радиально на корпусе и своими концами изогнутыми упру- стержнями, вторые концы которых разны над диафрагмой по ее наружному ру со стороны корпуса. щуюленноустани фика, ошениженоднимгимимешеконту1Изобретение относится к подъемнотранспортному оборудованию, а именно к вакуумным грузозахватным устройствам, и можетбыть использовано во всех отраслях народного хозяйства для удержания при пере. мещении вручную горизонтально, наклонно или вертикально расположенных изде лий с плоской или криволинейной поверхностью из воздухонепроницаемого материала.Известен вакуумный захват, содержащий 10 корпус с рукояткой, вакуумобразующую камеру с упругой диафрагмой, закрепленной на подпружиненном штоке, который установлен подвижно относительно корпуса, и фиксатор вертикального положения штока 1.Однако в известном захвате все вспомогательные приемы, выполняемые в процессе транспортирования груза, весьма утомительны для рабочего, так как для создания разрежения в вакуумобразующей камере требуется одновременное приложение усилий, затрачиваемых на герметизацию стыка и перемещение штока с диафрагмой относительно корпуса (последнее усилие создается кистью руки рабочего, что затруднительно), а в процессе разгрузки захвата постоянно заняты две руки рабочего. Все указанное затрудняет процесс обслуживания, вызывает быстрое утомление рабочего и, в конечном счете, ведет к снижению производительности труда. 15 20 25 30Цель изобретения - повышение удобства в эксплуатации.Поставленная цель достигается тем, чтовакуумный захват, содержащий корпус срукояткой, вакуум образующую камеру супругой диафрагмой, закрепленной на подпружиненном штоке, который установленподвижно относительно корпуса, и фиксаторвертикального положения штока, снабжензакрепленными радиально на корпусе одними своими концами изогнутыми упругими 40стержнями, вторые концы которых размещены над диафрагмой по ее наружному контуру со стороны корпуса.На фиг. 1 изображен вакуумный захват,общий вид; на фиг. 2 - шток, сечениеА - А на фиг. 1. 45Вакуумный захват имееет корпус 1, соединенный с рукояткой 2, шток 3, соединенный с упругой диафрагмой 4 вакуумобразующей камеры, фиксатор 5 рабочего положения штока, входящий в зацепление в гнездо 6 штока 3, фиксатор 7 поворота корпуса относительно штока 3, входящий в зацепление с продольным пазом 8 на штокеупругие элементы (радиальные изогнутыестержни )9, подпружиненные двуплечие рычаги 10 и 11 для приводов фиксаторов 5 и7, пружину 12 сжатия,Вакуумный захват работает следующимобразом. На поверхность транспортируемого груза устанавливают вакуумный захват и производят нажим на рукоятку 2 до ввода фиксатора 5 рабочего положения штока в гнездо 6 штока и производят транспортирова ние груза. Подпружиненный фиксатор 5 входит в зацепление со штоком автоматически,При нажатии на рукоятку 2 корпус 1 захвата перемещается вдоль оси штока 3, сжимая упругие элементы 9 и пружину 12. При этом упругие элементы 9, опираясь на внешнюю поверхность Б диафрагмы вакуумобразующей камеры, герметизируют стык между внутренней поверхностью В диафрагмы и поверхностью транспортируемого груза и накапливают энергию сжатия. Пружина 12 перемещает среднюю часть диафраг мы 4 в крайнее нижнее положение, вытесняя атмосферный воздух из вакуумобразующей камеры, ограниченной диафрагмой и поверхностью транспортируемого груза.При снятии нагрузки на рукоятку 2 (переходный момент, предшествующий подъему захвата с закрепленным грузом) упругие элементы 9 под действием наклонной энергии перемешают корпус 1 и соединенный с ним через фиксатор 5 шток 3 и среднюю часть диафрагмы 4 вверх от поверхности груза. При этом в вакуумобразующей камере создается разрежение воздуха, необходимое для удержания груза при транспортировании.В зависимости от характера выполняемой технологической операции устанавливают заданное значение разрежения воздуха в вакуумобразуюшей камере. Для этого фиксатор 7 поворота корпуса относительно штока устанавливают в один из продольных пазов 8 на штоке 3, которому соответствует гнездо 6 под фиксатор 5, расположенное в определенном сечении по длине штока.Например, если в процессе транспортирования груза не требуется его наклон или перемещение в вертикальную плоскость, то захват настраивают на наиболее легкие условия работы, для чего, нажав на рычаг 11, выводят фиксатор 7 из зацепления с продольным пазом 8 штока, и поворотом рукоятки 2 устанавливают фиксатор 7 в паз 8, которому соответствует гнездо 6, расположенное в верхнеей части штока, т. е. в положение, когда для ввода в рабочее положение штока фиксатором 5 потребуется наименьшее усилие, прикладываемое рабочим к рукоятке, Положение контролируется по указателю, нанесенному на корпусе и торце штока (не показано).При более тяжелых условиях работы фиксатор 7 устанавливается в продольный паз, обеспечивающий зацепление фиксатора 5 в крайнем нижнем положении в гнез. де 6.1070112 А -д Риг. г евский "Корректор О.Подписноемитета СССРоткрытийая наб., д. 4/5ул. Проектная, 4 СостаТехредТиражВНИИПИ ГоеудаРстпо делам изобр113035, Москва, Ж - 3лиал ППП Патент,витель А.И. Верес83 Тигор Редактор И. Ковальчук Заказ 282/24 венного коетений и5, РаушскУжгород,3Для разгрузки захвата нажимают на рычаг 10. При этом фиксатор 5 штока в рабочем положении выходит из гнезда 6 и корпус под действием упругих элементов 9 перемешается вверх до полной их разгрузки. Одновременно с этим пружина 12, разжимаясь, приподнимает корпус и зацепленные на нем упругие элементы в крайнее верхнее положение, образуя между упругими элементами и внешним контуром диафрагмы со стороны корпуса зазор Н, необходимый для рагрузки диафрагмы от действия упругих элементов в нерабочем положении. После разгрузки упругих элементов действие нагрузок на диафагму прекращается и она занимает свободное положение, в результате чего герметичность камеры под действием внутренних напряжений диафрагмы и из-за наличия выступающей части штока со стороны вакуумобразующей камеры нарушается и давление в камере выравнивается с атмосферным. Захват отводится от транспортируемого груза.Таким образом, обслуживание предложенного вакуумного захвата сводится к элементарным вспомогательным приемам - нажатию на рукоятку для удержания груза и на рычаг фиксатора для разгрузки, при этом усилие нажатия на рукоятку составляет минимальное значение, устанавлива- О емое в зависимости от выполняемого технологического процесса, а наличие в захвате упругих радиальных стержней обеспечивает устойчивое фиксированное положение груза относительно рукоятки захвата, что позволяет рабочему точно ориентировать груз в пространстве и, кроме того, обеспечивает удержание грузов с криволинейной поверхностью за счет полного обжатия уплотнительного пояса по всему контуру.
СмотретьЗаявка
3504830, 28.10.1982
ПРЕДПРИЯТИЕ ПЯ В-2120
МИШНИН БОРИС ВАСИЛЬЕВИЧ, ТОЛСТОВ БОРИС МИХАЙЛОВИЧ, АРТОБОЛЕВСКИЙ АЛЕКСАНДР НИКОЛАЕВИЧ
МПК / Метки
МПК: B66C 1/02
Опубликовано: 30.01.1984
Код ссылки
<a href="https://patents.su/3-1070112-vakuumnyjj-zakhvat.html" target="_blank" rel="follow" title="База патентов СССР">Вакуумный захват</a>
Устройство для измерения относительных положений конвейерных частей

Номер патента: 935394
Опубликовано: 15.06.1982
МПК: B65G 17/48
Метки: конвейерных, относительных, положений, частей
...связаны с соответствующими штырями 2, Индикаторы 7 - 9 выведены в легко обозримую зону станка. К частям 1 и 3 корпуса прикреплены упругие элементы 11, например, резиновые, кроме того, частии 3 корпуса стянуты винтами 12 с гайками через слабые пружины 13 и4 по две с каждой стороны. Третья часть 15 корпуса имеет вырез, глубина которого соответствует высотам первых двух частей 1 и 3 корпуса с прикрепленными к ним упругими элементами 11, которые установлены с возможностью взаимодействия с третьей частью 15. На верхней плоскости третьей части 15 корпуса установленышканты 16, а также выполнены отверстия для винтов 17 крепления обрабатываемой на станке доски 18, перемещаемые конвейерами 19 и 20 к станку.Устройство для измерения...
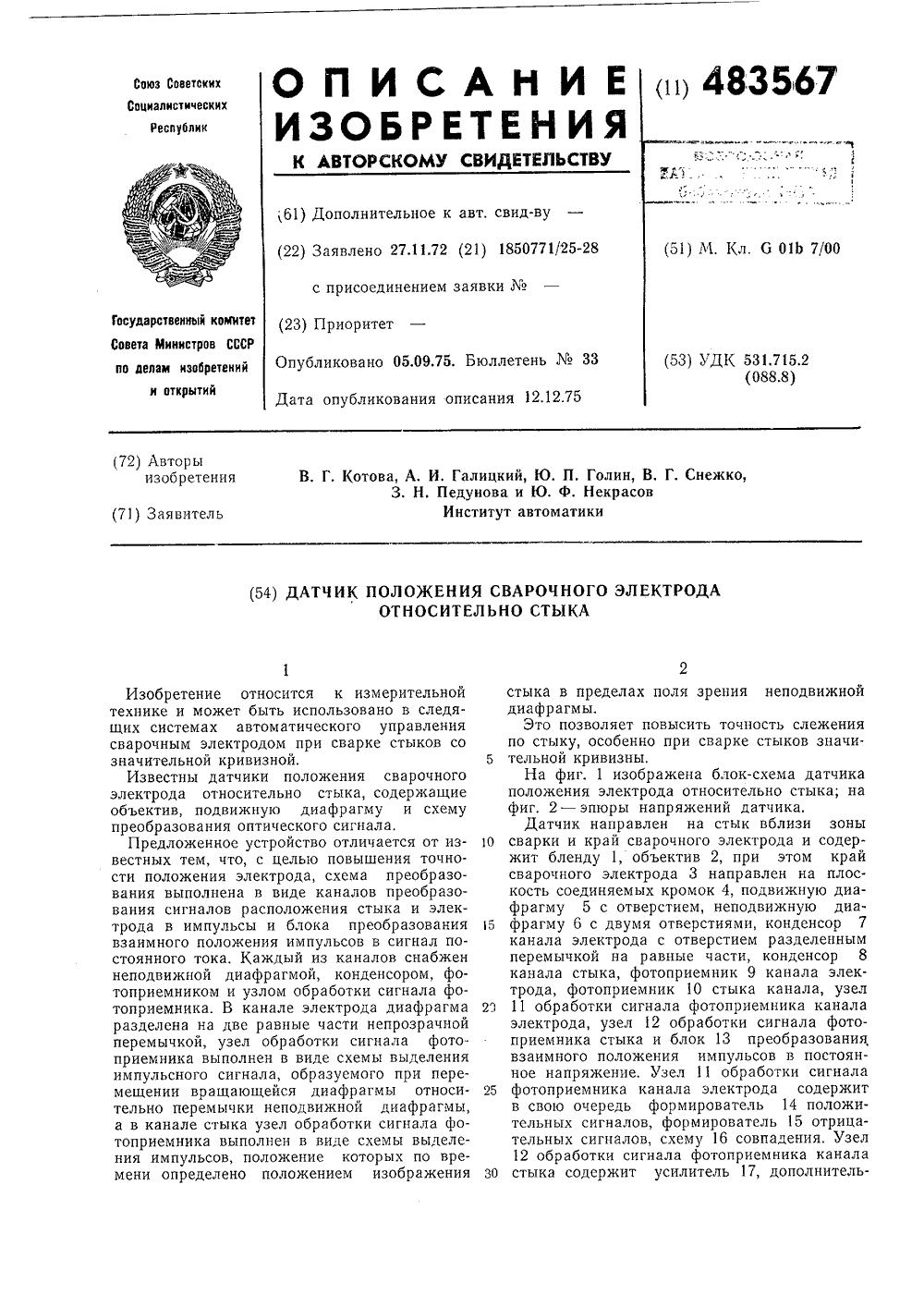
Датчик положения сварочного электрода относительно стыка
Номер патента: 483567
Опубликовано: 05.09.1975
Авторы: Галицкий, Голин, Котова, Некрасов, Педунова, Снежко
МПК: G01B 7/00
Метки: датчик, относительно, положения, сварочного, стыка, электрода
...9 канала электрода. Отраженный от кромок соединяемых деталей световой поток электрода, прошедший через отверстия подвижной диафрагмы 5 и неподвижной диафрагмы б канала стыка, собирается конденсором 8 на фотоприемник 10 канала стыка, Наличие перемычки в центре неподвижной диафрагмы в поле зрения фотоприемника канала электрода и наличие стыка в центре поля зрения фотоприемника канала стыка позволяет на выходе каждого из них получать сигналы с паузами т; т (фиг. 2 а, д). Взаимное положение этих пауз определяет положение стыка относительно электрода.Для упрощения использования этой информации из сигналов пауз формируются импульсы стыка и электрода. Для этого сигналы с фотоприемников каналов стыка и электрода подаются соответственно на...
Устройство для определения линейного положения штока гидроцилиндра относительно его корпуса

Номер патента: 1796871
Опубликовано: 23.02.1993
МПК: G01B 5/14
Метки: гидроцилиндра, корпуса, линейного, относительно, положения, штока
...путем и составило выражение 1:2:4. Именно такое соотношенйе позволило определить 50 положение штока гидроцилиндра относительно его корпуса в максимально возможном диапазоне перемещений при минимальных габаритах самого устройства,На фиг. 2 показана расчетная схема оп ределения положения штока гидроцилиндра относительно его корпуса, где приняты следующие обознацения;АВО -положение первого плеча 3 первого двуплечего рычага в начальном положении,1796871 3 О=АКо=при использовавинного угла. 1.0 = 2 Г 2 фАВо Рассмотревреугольник АВ 1 С 5 6АВ 1 - положение первого плеча 3 пер- Искомая величина Ьбудет выражена вого двуплечего рычага в смещенном поло- как разность: жении, Л.Е = Ь 1 - 1 о 2 Г 2АВо.зп- - 2/2ВОСО - положение первого плеча 4...
Захват с фиксатором положения

Номер патента: 1454688
Опубликовано: 30.01.1989
МПК: B25J 15/00
Метки: захват, положения, фиксатором
...клапан 26 по трубопроводу18, золотники 21 и 22 управления потрубопроводу 19 масло поступает вправую штоковую полость гидроцилиндра 11, последний через шток 10 и тяги 14 поворачивает губки 15 с упругоэластичными элементами 17 одна к другой вокруг оси 16, тем самым обжимаяколодку с заготовкой обуви. Послесрабатывания электромагнита 24 золотника 22 перекрывается доступ масла в гидроцилиндр 11 и жидкость потрубопроводам 18 и 19 поступает вупругоэластичный элемент 17, он расширяется и прижимает, захватывая,колодку с заготовкой обуви. Но в период автоманипулирования в пространстве в динамическом режиме из-за непредвиденных явлений (под воздействием давления жидкости через упругоэластичный элемент на губки, перепада давлений в...
Поворотное устройство вилочного захвата погрузчика

Номер патента: 1041507
Опубликовано: 15.09.1983
МПК: B66F 9/22
Метки: вилочного, захвата, поворотное, погрузчика
...вобе стороны от нейтрального положения на 90 . Давление на гидроцилиндр 4 подается от насоса 5 припереключении рукоятки б через управляющий гидрораспределитель 7, который имеет подпружиненный золотник 8,рабочие отверстия 9 и 10,. впускноеотверстие 11 и сливное отверстие 12.Впускное отверстие 11 соединенос насосом 5, а сливное 12 - с баком.Рабочие отверстия 9 и 10 трубопроводами 13 и 14 связаны с отверстиями15 и 16 запорного гидрораспределителя 17, снабженного электромагнитом18 управления. Рабочие отверстия 19и 20 гидрораспределителя 17 трубопроводами 21 и 22 связаны черездроссели 23 и 24 обратными клапанами с поршневой 25 и штоковой 26 полостями гидроцилиндра 4.Для фиксации поворотной плиты 2служит поджимаемый пружиной 27 запор 28...
Предыдущий патент: Устройство для распределения сыпучих материалов по емкостям
Следующий патент: Замок для стропов
Случайный патент: Устройство для управления электрическим режимом дуговой электропечи