Устройство для контроля модуля вектора перемещения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1578450
Автор: Худорожков


Текст
(54) УСТРОЙСТВ ДУЛЯ ВЕКТОРА (57) Устройство о мерительной техн зовано для контро72 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТИРЫТИЯМПРИ ГКНТ СССР ПИСАНИЕ ИЗ Н А ВТОРСКОМЪ/ СВИДЕТЕЛЬСТВ.26ожков1.717 (088.8)идетельство СССР03 М 1/48, 1986.нелинейным схемам / ПодМ.: Мир, 1977, с. 27.О ДЛЯ КОНТРОЛЯ МОПЕРЕМЕЩЕНИЯносится к автоматике и изике и может быть испольля модуля вектора в прост 2ранственной системе произвольно задаваемых координат. С целью расширения области применения за счет контроля модуля вектора в произвольно зада ваемой системе координат в устройство введены сумматоры 2, 3, инверторы 4, 5 и шины 12, 13 сигналы которых, задаваемые в масштабе выходных напряжений датчика 1, интерпретируют смещение начала координат относительно начальной нулевой точки. Результат вычисления модуля вектора сравнивается с параметром, задаваемым на шине 11, а на выходе компаратора 9 формируется сигнал сравнения, по которому осуществляют контроль модуля вектора. 1 ил.1578450 Формула изобретения Составитель В. ПодолянРедактор Л. Пчолинская Техред А. Кравчук Корректор Т. МалецЗаказ 1904 Тираж 502 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР13035, Москва, Ж - 35, Раушская наб., д. 4/5Производственно. издательский комбинат Патент, г. Ужгород, ул. Гагарина, 01 Изобретение относится к автоматике и измерительной технике и может быть использовано для контроля модуля вектора в пространственной системе произвольно задаваемых координат.Цель изобретения - расширение области применения за счет контроля модуля вектора в произвольно задаваемой системе координат, начало которой смещено относительно центра круговой зоны.На чертеже представлена блок-схема устройства.Устройство содержит двухкоординатный датчик 1, сумматоры 2 и 3, инверторы 4 и 5, квадраторы 6 и 7, сумматор 8, компаратор 9, квадратор 10, шину 11 параметра, шину 12 первой координаты, шину 13 второй координаты.Двухкоординатный датчик 1 своими выходами Х и У подключен к входам сумматоров 2 и 3, вторые входы которых подключены к инверторам 4 и 5, входы которых подключены к шинам 12 и 13, задающим начало координат. Выходы сумматоров 2 и 3 подсоединены к входам квадраторов 6 и 7, выходы которых подключены к входам сумматора 8, выход которого подключен к одному из входов компаратора 9, второй вход которого подключен к квадратору 10, вход которого подключен к шине 11. Шины 12 и 13 подключены к входам инверторов 4 и 5 соответственно,Устройство работает следующим образом.При перемещении объекта двухкоординатный датчик 1 выдает текущие значения координат Х; и У; в виде напряжений, пропорциональных перемещению объекта в круговой зоне, на входы сумматоров 2, 3, на вторые входы которых подаются напряжения с выходов инверторов 4 и 5. На входы инверторов 4 и 5 с шин 12 и 13 подаются значения смещения начала координат в виде напряжений в масштабе напряжений текущих координат. В сумматорах 2 и 3 текущие координаты суммируются со значениями напряжений смещения начала координат, приходящих в сумматор с обратным знаком, и возводятся в квадрат квадраторами 6 и 7, С выходов квадраторов 6 и 7 сигналы подаются на сумматор 8, с выхода которого сумма координат подается на один из входов компаратора 9. На второй вход компаратора 9 подается значение квадрата координаты с квадратора 10, равной радиусу круговой зоны перемещения объекта в виде напряжения, масштаб которого равен масштабу Х, (У;). При равенстве сигналов на входах компаратора 9 изменяется его выходной уровень. В случае смещения начала коордиант по одной координате шина 13, сумматор 3 и инвертор могут быть исключены. Устройство для контроля модуля вектора перемещения, содержащее двухкоординатный датчик перемещений, первый и второй квадраторы, выходы которых подключены к входам первого сумматора, отличаюи 4 ееся тем, что, с целью расширения области применения за счет контроля в произвольно задаваемой системе координат, в него введены шина первой координаты, шина второй координаты, шина параметра, два инвертора, второй и третий сумматоры, компаратор и третий квадрате 1 в, выход которого подключен к первому входу компараЗо тора, к второму входу которого подключен выход первого сумматора, первый и второй выходы двухкоординатного датчика перемещений подключены к первым входам, соответственно, второго и третьего сумматоров, к вторым входам которых подключены выходы, соответственно первого и второго инверторов, выходы второго и третьего сумматоров подключены к входам, соответственно первого и второго квадраторов, шины первой и второй координаты подключены к входам, соответственно первого и второго инверторов, шина параметра подключена к входу третьго квадратора.
СмотретьЗаявка
4401710, 04.04.1988
ПРЕДПРИЯТИЕ ПЯ В-2704
ХУДОРОЖКОВ ЮРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G01B 7/03
Метки: вектора, модуля, перемещения
Опубликовано: 15.07.1990
Код ссылки
<a href="https://patents.su/2-1578450-ustrojjstvo-dlya-kontrolya-modulya-vektora-peremeshheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для контроля модуля вектора перемещения</a>
Способ измерения первой производной по координате приращения полного вектора магнитного поля земли

Номер патента: 148136
Опубликовано: 01.01.1962
Авторы: Матошин, Сербуленко
МПК: G01V 3/40
Метки: вектора, земли, координате, магнитного, первой, полного, поля, приращения, производной
...ограничителя импульсов 1 магнитометра, работающего на принципе измерения импульсов, сигналы подаются на интегрирующую схему 2 с постоянной времени на два порядка больше периода, питающего датчик генератора. Напряжение с интегрирующей схемы 2 подается на трехкаскадный операционный усилитель 3, Выходное напряжение с усилителя 3 подается на записывающий прибор 4 магнитоэлектрического типа с часовым приводом. При условии компенсации вектора Т магнитного поля земли напряженке на выходе интегратора равно нул 1 о. При изменении поля вектора Т соотношение высот импульсов нззленяется н пя выходе интеГряторя выделяется постоянная сляГяюшяя пропорциональная производной вектора Т по времени и производной ТОГО же вектОря по координате его...
Устройство для считывания графической информации

Номер патента: 1728872
Опубликовано: 23.04.1992
Авторы: Мухарский, Хациревич, Якушев
МПК: G06K 11/06
Метки: графической, информации, считывания
...следовательно, и формирование компенсирующего напряжения ЦАП 21 идет дотех пор, пока на счетчике 10 не зафиксируется число импульсов, равное константе. Это число дешифрируется дешифратором 22. На выходе дешифратора появляется запрещающий потенциал, который поступает на вход одновибратора 52, Перепад напряжения на его выходе с высокого уровня на низкий вызывает кратковременный импульс на его выходе. Этот импульс проходит через элемент И 51 и поступает на счетный вход счетчика 43 операций.Импульс с одновибратора 52, пройдя элемент И 51, увеличивает содержимое счетчика 43 на единицу, поэтому дешифратор 44 своим вторым выходом закрывает элемент И 46 по его первому входу. На первом выходе дешифрэтора 44 возникает раарешающий (высокий)...
Устройство для передачи сигналов с дельта-модуляцией

Номер патента: 566386
Опубликовано: 25.07.1977
МПК: H04L 17/02
Метки: дельта-модуляцией, передачи, сигналов
...1 под ключен к входу делителя частоты 2, блок 9 выделения огибающей, элемент НЕ 10 и сумматор 11 по модулю два, на первый вход которого подан входной сигнал и второй 40 вход которого подключен к выходу делителя частоты 2, а выход подключен к первому входу блока 9 выделения огибающей и . к первому входу первого триггера 3,второй вход которого подключен к выходу 45 блока 9 вьщеления огибающей, а второй вы 1 ход - ко второму входу второго элементаИ 6, причем выход третьего элемента И 7подключен к первому входу второго триггера 4, выход второго элемента И 6 через элемент НЕ 10 подключен ко второмувходу четвертого элемента И 8, а вторыевходы блока 9 выделения огибающей, второго триггера 4 и третьего элемента И 7 подключены к выходу задающего...
Коммутатор
Номер патента: 1248045
Опубликовано: 30.07.1986
Автор: Капник
МПК: H03K 17/00
Метки: коммутатор
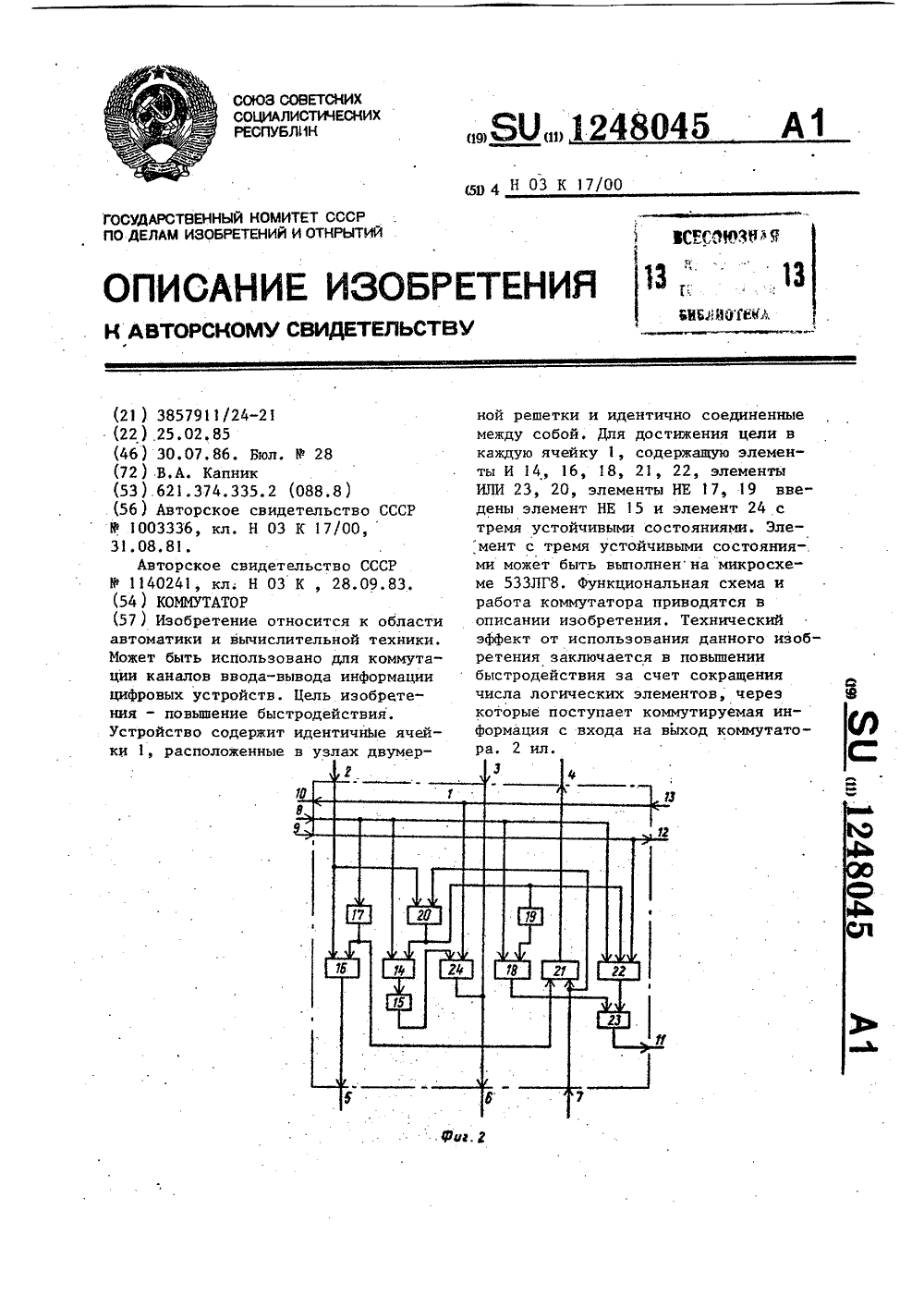
...- с третьими седьмого - с четвертым.Наличие нулевых логических уровней на горизонтальных входах 9 всехячеек 1 коммутатора не нарушает логику работы коммутатора.Если на вертикальные входы 2 ячеек 1 верхней строки коммутатора поданы нулевые логические уровни, ана вертикальные входы 7 нижней строкикоммутатора - единичные логическиеуровни, то при коде 01101010 на горизонтальных входах 8 ячеек 1 и нулевых логических уровнях на горизонтальных входах 9 ячеек 1 этого жестолбца коммутатора осуществляетсясоединение седьмого входного каналас первым выходным, пятого - с вторым, третьего - с третьим и второгос четвертым.Коммутатор в этом случае работаетследующим образом. На горизонтальныйвход 8 ячейки 1, лежащей на пересечении седьмой строки с...
Устройство для определения вектора дисбаланса

Номер патента: 1350513
Опубликовано: 07.11.1987
Авторы: Гордиенко, Квашин, Меньшиков, Цыбулько
МПК: G01M 1/22
Метки: вектора, дисбаланса
...сигнал от дат, 13 чика 6 метки. 1 а вгпходах интеграторов 5 и О формируется соответственно синфазцая и квадратурная компоненты сигнала дисбаланса. Сигнал квадратурной компоненты с выхода интегратора 1 О подается на входы компараторов 11-13 нуля, плюса и минуса, которые выдают единичные сигналы в зависимости от величины и знака квадратурной компоненты. С выходов компараторов 11-13 сигналы подаются на управляющие входы умножителя 8 частоты с переменным коэффициентом умножения. На вход умножителя 8 частоты (фиг,2) с датчика 6 метки поступает импульсный сигнал с частотой Г , который после синхронизации в схеме 25 с частотой Е через схему 26 задержки поступает на вход Сброс" управляемого счетчика 27, на счетный вход которого пос- . тупают...
Предыдущий патент: Устройство контроля перемещений
Следующий патент: Устройство для измерения толщины слоев многослойных изделий
Случайный патент: Радиальный интегриметр