Способ автоматического регулирования объектапо п-параметрам
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 134070
Автор: Горский

Текст
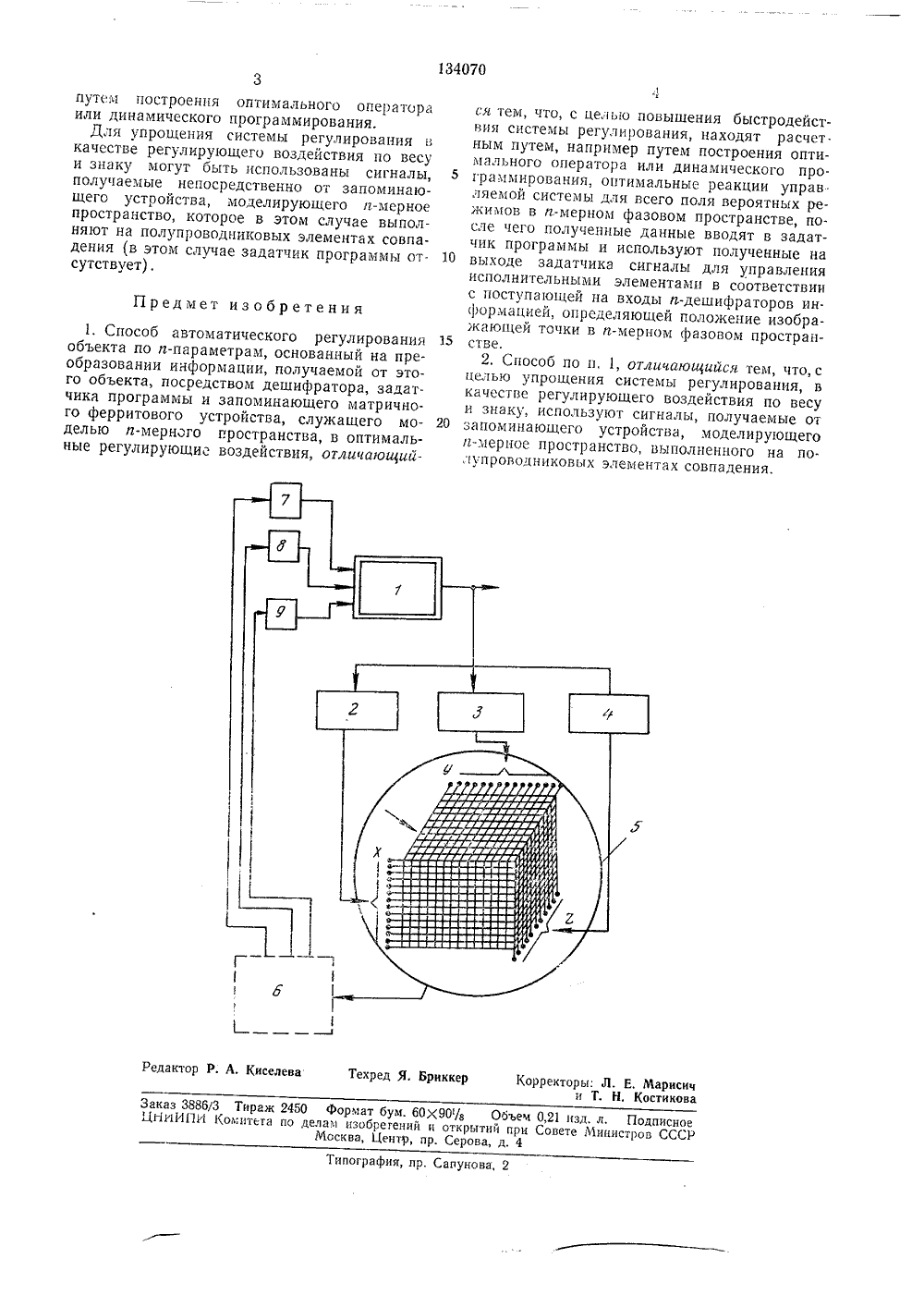
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Селга СоветскикСоциалистических Республик ЬСТ ависимое от авт. сваявлено 1 О.Х,1959 (Ж тв 64 с присоединением за иоритет Комитет па аелам ретеиии и открыти Совете Министров СССР Опубликовано 17,Х 1 Дата опубликования М 23 ллете я 31 Х 11.196( писа Авторизобретения М. Горский Заявитель БЪЕ ЕГУЛ ИРОВАНЕТРАМ величин параметров на соответствующие ющего матричногослужащего моства, чем достигаей изображающейоведение регулиру.пространстве,К АВТОРСКОМУ СВИ ПОСОБ АВТОМАТИЧЕСКО ПО тг-ПИзвестны способы экстремального автоматического регулирования различных объектов по гг-параметрам, основанные на предварительном преобразовании информации, получаемой от регулируемого объекта, посредством дешифратора, задатчика программы и запомина югцего м атр ич ного ферритового устройства, служащего моделью и-мерного пространства, в оптимальные регулирующие сигналы, используемые затем для воздействия на регулируемый объект. Однако эти способы сложны и недостаточно высоко быстродейст,вие системы регулирования, в которых реализованы эти способы.Предлагаемый способ отличается введением в задатчик программы предварительно рассчитанных данных, соответствующих оптимальным реакциям управляемой системы, и использованием полученных на выходе задатчика сигналов для управления исполнитель. ными механизмами, при этом изображающая точка регулируемого обьекта в фазовом пространстве определяется заполняющим устройством, моделирующим гг-мерное пространство.Для пояснения описываемого способа при ведена блок-схема системы оптимального программного регулирования по фазовому пространству х, у, г.Информация ообъекта 1 поступае поведении регулируемогот на дешифраторы 2, 3 и 4 которые в зависимости от х, у, г подают импульсы адресные шины запомина ферритового устройства делью гт-мерного простран ется определение текущ точки, характеризующей п емого объекта в фазовом Число адресных шин по каждой из переменных х, у, г выбирают исходя из рабочего диапазона изменений этих переменных и принятого шага Лх, Ьу, Лг. Выход матричного устройства соединен с задатчиком программы б. Полученные на выходе задатчика сигналы используют для управления псполнител ными элементами 7, 8, 9, число которых также, как и число дешифраторов, в общем случае может быть равно и, Управление исполнительными элементами, воздействующими на регулируемый объект, производят в соответствии с поступающей на входы гг-дешифраторов ин. формации, определяющей положение изображающей точки в гг-сгерном фазовом пространстве.Оптимальные реакции управляемой системы для всего поля ьероятных режимов работы в п-мерном фазовом пространстве, опреде ляющие данные, вводимые в задатчик программы, находят расчетным путем, напримерПредмет изобретения Редактор Р. А. Киселев хред Я. Бриккер Корректоры: Л. Е. Марисич и Т. Н. КостиковаЗаказ 3886/3 Тираж 2450 формат бум. 60 Х 90/а Ооъем 0,21 изд. л, ПодписноеЦг 1 ггИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Центр, пр. Серова, д. 4 пография, пр. Сапунова,построени птималног оператора или динамического программирования.Для упрощения системы регулирования в качестве регулирующего воздействия по весу и знаку могут быть использованы сигналы, 5 получаемые непосредственно от запоминающего устоойства, моделирующего гг-мерное пространство, которое в этом случае выполняют на полупроводниковых элементах совпадения (в этом случае задатчик программы от сутствует). 1. Способ автоматического регулирования 15 объекта по гг-параметрам, основанный на преобразовании информации, получаемой от этого объекта, посредством дешифратора, задатчика программы и запоминающего матричного ферритового устройства, служащего мо делью а-мерного г.ространства, в оптимальные регулирующие воздействия, отличающийся тем, что, с целью повышения быстродейст. вия системы регулирования, находят расчет. ным путем, например путем построения оптимального оператора или динамического программирования, оптимальные реакции управ ляемой системы для всего поля вероятных режимов в гг-мерном фазовом пространстве, после чего полученные данные вводят в задатчик программы и используют полученные на выходе задатчика сигналы для управления исполнительными элементами в соответствии с поступающей на входы а-дешифраторов ин. формацией, определяющей положение изображающей точки в гг-мерном фазовом пространстве.2. Способ по и, 1, отличающийся тем, что, с целью упрощения системы регулирования, в качестве регулирующего воздействия по весу и знаку, используют сигналы, получаемые от запоминающего устройства, моделирующего и-мерное пространство, выполненного на полупроводниковых элементах совпадения.
СмотретьЗаявка
640873
Ю. М. Горский
МПК / Метки
МПК: G05B 13/02, G05B 17/02
Метки: объектапо, п-параметрам
Опубликовано: 01.01.1960
Код ссылки
<a href="https://patents.su/2-134070-sposob-avtomaticheskogo-regulirovaniya-obektapo-p-parametram.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического регулирования объектапо п-параметрам</a>
Устройство для оптимальной амплитудно-фазовой модуляции

Номер патента: 119898
Опубликовано: 01.01.1959
Автор: Чжан
МПК: H03C 5/00
Метки: амплитудно-фазовой, модуляции, оптимальной
...модуляциюдиапазона непрерывно, что увупрощает схему передающегоки фазоэращателем,Описываемое устройство для оптимальнойдуляции содержит логарифмический усилительчивающий постоянный фазовый сдвиг на частотЛогарифмический усилитель и фазовращатляцпонный тракт передатчика. дно-фазовой моду нанни задержки с от ю лишь на ди:скрет позволяет осуществлять оптимальную ам на всех частотах передаваемого звуковогеличивает точность в передаче сообщенияустройства, заменив в нем ливию задерж амплитудно-фазовои мои фазовращатель, обеспе ах звукового диапазона, ель включаются в моду едмет изобрете й модуляции в оби усилитель, отлиальной амплитуднох частот, на выходе ь, создающий по- частот. Устройство для оптимальвой ласти звуковых чаотот,...
Устройство для оптимальной регистрации виброграмм

Номер патента: 1583904
Опубликовано: 07.08.1990
Автор: Уханов
МПК: G01V 1/37
Метки: виброграмм, оптимальной, регистрации
...которого перестраивается синхронно с сигналом, поступающим с выхода формирователя 3 вибрационного сигнала. При этом зависимость частоты И от времениможет меняться по любому закону (в том числе и Ш(С). = сопзС) Сигнал с выхода следящего фильтра 2 поступает на два последовательно включенных цифровых аттенюаторов 9 и 10, цифровые входы каждого из кото рых через ПЗУ 7 и 8 подключены к АЦП 5 и 6, на аналоговые входы которых поступают сигналы: на один с выхода следящего фильтра, а на другой с измерителя энергии. Сигнал, пройдя 25 последовательные цифровые аттенюато,ры 9 и 10, записывается регистратором 11Программируя ПЗУ 8, задают энергетически-амплитудную характеристику, 30 программируя ПЗУ 7, - амплитудно- амплитудную характеристику...
Устройство фазового разделения сигналов

Номер патента: 573866
Опубликовано: 25.09.1977
Авторы: Березин, Дегтярев, Климов, Малюгин, Шиповский
МПК: H03K 5/156
Метки: разделения, сигналов, фазового
...вычитания, вторыевходы которых подключены к выходу формирователя сигналов, введен генератор периодических колебаний, например,релаксационный, выход которого подключен к формирователю сигналов, а линия задержки включена во времязадающую цель генераторапериодических колебаний,На чертеже изображена структурнаяэлектрическая схема предлагаемого устройства фазового разделения сигналов.Устройство содержит формирователь 1сигналов с синхрогенератором 2 (условновыделен отдельным блоком), сумматор 3,устройство 4 вычитания, линию 5 задержки.573866 Составитель М. АудрингРедактор О, Стенина Техред М, Левицкая Корректор А, Гриценко Заказ 3776/41 Тираж 1065 ПодписноеЦНИИПИ Государственного комитета Совета Министров СССРпо делам изобретений и...
Устройство для измерения фазового сдвига сигналов

Номер патента: 866500
Опубликовано: 23.09.1981
Авторы: Алексеева, Гомзин, Драгунов, Елисеев, Катаев, Турнецкий
МПК: G01R 25/00
Метки: сдвига, сигналов, фазового
...величина аЧ меньше 180 илиообольше 180 . Для этого суммарный сигнал О подается на первый вход Фазового детектора 7, на второй вход которого подается разностный сигнал О. Фазовый детектор вырабатывает напряжение положительной полярности, если фазовый сдвигМд между суммарными О и разностными Од напряжениями равен +90 (фиг. 2 а, б, в) и вырабатывает напряжение отрицательной полярности,если Чд -90 (Фиг, 2 д, ж, е) . Теперь рассмотрим амплитудные соотношения между Оа и О (фиг. 2). из построения векторных диаграмм видно (фиг. 2 а, б, в), что с увеличением И от О до 180 происходит монотонное увеличение амплитуды разностного сигнала 104 и монотонное уменьшение амплитуды суммарного сигнала 1 О 211, причем при Ч90 1 Од 1 = 101. Дальнейшее...
Анализатор статистических характеристик фазовых флюктуаций сигналов

Номер патента: 930153
Опубликовано: 23.05.1982
Авторы: Кофанов, Курков, Степаненко
МПК: G01R 25/00
Метки: анализатор, сигналов, статистических, фазовых, флюктуаций, характеристик
...входом электродвигателя 7, вал которого соединен с осью инерционного Фазовращателя 1. Выход фазометра 8 подключен ко входу блока 9 обработки информации.Устройство работает следующим образом.Исследуемый сигнал через инерционный фазовращатель 1 и Фазоврацатель 2 поступает на вход узковолосногоФильтра 3, в котором осуществляетсявременная задержка сигнала (на время, обратно пропорциональное полосепропускания узкополосного фильтра) .Сигнал ошибки, пропорциональный разности Фаз исходного и задержанногосигналов, с выхода фазового детектора 4 через Фильтры 5 и 6 нижних 1 р частот поступает соответственно науправляющие входы фазовращателя 2и электродвигателя 7. Если частотаисследуемого сигнала не равна номинальной частоте, то разность Фаэмежду...
Предыдущий патент: Прибор для определения оптимума вулканизации резиновых смесей
Следующий патент: Устройство для определения старшего разряда разности двух двоичных чисел
Случайный патент: Способ очистки растворов хлоридов щелочных металлов от ионов кальция