Устройство для измерения параметров динамических звеньев систем управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
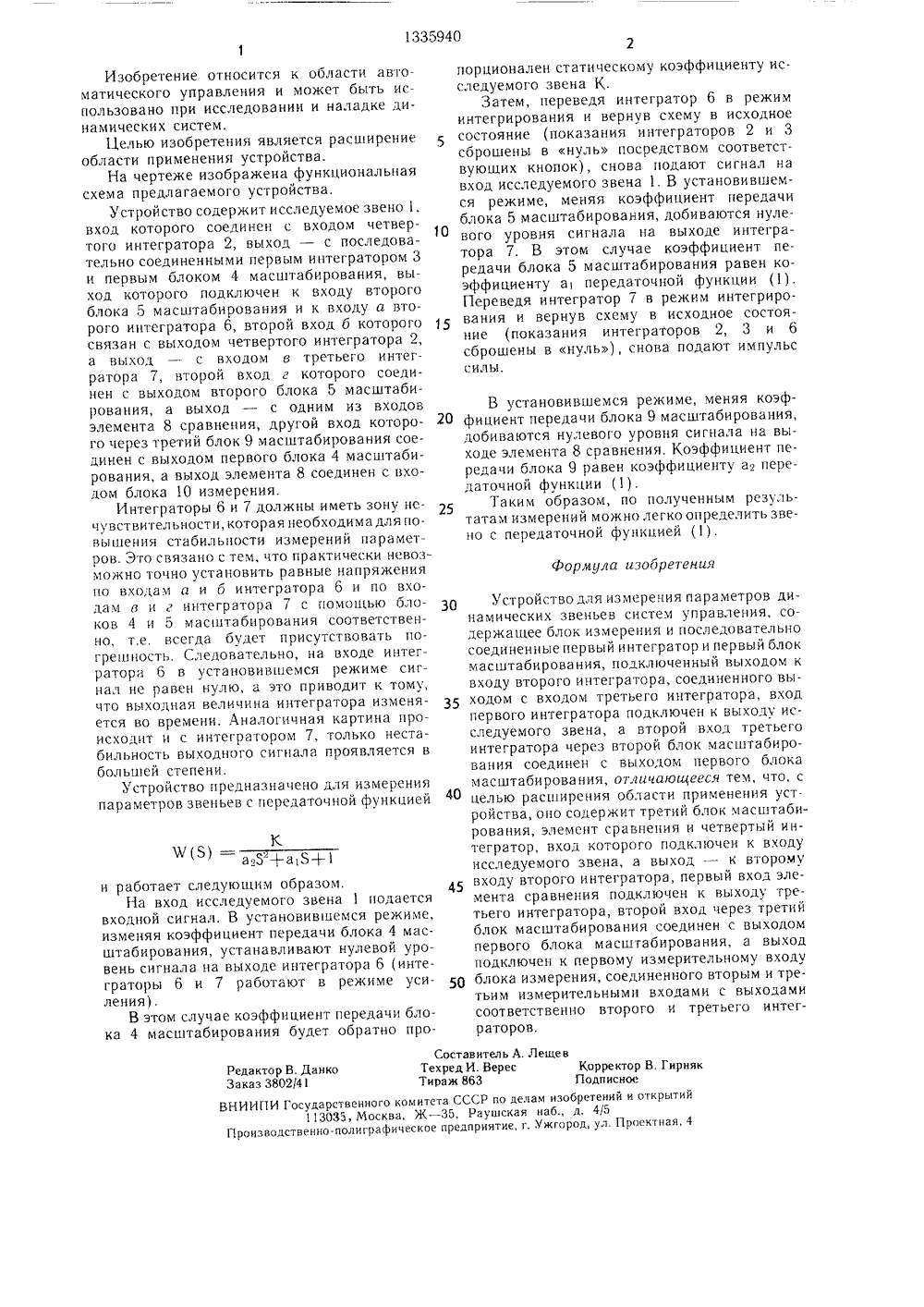
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 19) (11 335 и 4 б 05 В 23 0 ЕТЕНИ ческий ст ар СССР1978.ССР1980.ЕРЕНИХ ЗВ его п 1 ил. ПА- ЬЕВ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИЗОБР Н А ВТОРСКОМ,Ф СВИДЕТЕЛЬСТВ(54) УСТРОЙСТВО ДЛЯ ИЗМРАМЕТРОВ ДИНАМИЧЕСКСИСТЕМ УПРАВЛЕНИЯ(57) Изобретение относится к области автоматического управления и может быть использовано при исследовании и наладке динамических систем. Цель изобретения - расширение области применения. Введение четвертого интегратора 2, элемента сравнения 3 и третьего блока 9 масщтабирования позволяет измерять параметры инерционных звеньев первого и второго порядка в процессе работы, когда на вход подается сигнал в виде ненормированного импульса, имеющ роизвольную форму и длительность,1335940 формула изобретения 45 50 Составитель А. Лешев Реда кто р В. Данко Техред И. Верес Корректор В. Гирняк Заказ 3802/41 Тираж 863 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4Изобретение относится к области автоматического управления и может быть использовано при исследовании и наладке динамических систем.Целью изобретения является расширениеобласти применения устройства.На чертеже изображена функциональнаясхема предлагаемого устройства,Устройство содержит исследуемое звено 1,вход которого соединен с входом четвертого интегратора 2, выход - с последовательно соединенными первым интегратором 3и первым блоком 4 масштабирования, выход которого подключен к входу второгоблока 5 масштабирования и к входу а второго интегратора 6, второй вход б которогосвязан с выходом цетвертого интегратора 2,а выход - с входом в третьего интегратора 7, второй вход г которого соединен с выходом второго блока 5 масштабирования, а выход - с одним из входовэлемента 8 сравнения, другой вход которого через третий блок 9 масштабирования соединен с выходом первого блока 4 масштабирования, а выход элемента 8 соединен с входом блока 10 измерения.Интеграторы 6 и 7 должны иметь зону нечувствительности, которая необходима для повышения стабильности измерений параметров. Это связано с тем, цто практически невозможно тоцно установить равные напряженияпо входам а и б интегратора 6 и по входам в и г интегратора 7 с помощью бло- З 0ков 4 и 5 масштабирования соответственно, т.е. всегда будет присутствовать погрешность. Следовательно, на входе интегратора 6 в установившемся режиме сигнал не равен нулю, а это приводит к тому,что выходная величина интегратора изменяется во времени. Аналогичная картина происходит и с интегратором 7, только нестабильность выходного сигнала проявляется вбольшей степени,Устройство предназначено для измеренияпараметров звеньев с передаточной функцией 40 и работает следующим образом.На вход исследуемого звена 1 подается входной сигнал. В установившемся режиме, изменяя коэффициент передачи блока 4 масштабирования, устанавливают нулевой уровень сигнала на выходе интегратора 6 (интеграторы 6 и 7 работают в режиме усиления).В этом случае коэффициент передачи блока 4 масштабирования будет обратно пропорционален статическому коэффициенту исследуемого звена К.Затем, переведя интегратор 6 в режим интегрирования и вернув схему в исходное состояние (показания интеграторов 2 и 3 сброшены в нуль посредством соответствующих кнопок), снова подают сигнал на вход исследуемого звена 1. В установившемся режиме, меняя коэффициент передачи блока 5 масштабирования, добиваются нулевого уровня сигнала на выходе интегратора 7. В этом случае коэффициент передачи блока 5 масштабирования равен коэффициенту а передаточной функции (1). Переведя интегратор 7 в режим интегрирования и вернув схему в исходное состояние (показания интеграторов 2, 3 и 6 сброшены в нуль), снова подают импульс силы. В установившемся режиме, меняя коэффициент передачи блока 9 масштабирования, добиваются нулевого уровня сигнала на выходе элемента 8 сравнения. Коэффициент передачи блока 9 равен коэффициенту аз передаточной функции (1).Таким образом, по полученным результатам измерений можно легко определить звено с передаточной функцией (1). Устройство для измерения параметров динамических звеньев систем управления, содержащее блок измерения и последовательно соединенные первый интегратор и первый блок масштабирования, подключенный выходом к входу второго интегратора, соединенного выходом с входом третьего интегратора, вход первого интегратора подключен к выходу исследуемого звена, а второй вход третьего интегратора через второй блок масштабирования соединен с выходом первого блока масштабирования, отличающееся тем, что, с целью расширения области применения устройства, оно содержит третий блок масштабирования, элемент сравнения и четвертый интегратор, вход которого подклюцен к входу исследуемого звена, а выход - к второму входу второго интегратора, первый вход элемента сравнения подключен к выходу тре. тьего интегратора, второй вход через третий блок масштабирования соединен с выходом первого блока масштабирования, а выход подключен к первому измерительному входу блока измерения, соединенного вторым и третьим измерительными входами с выходами соответственно второго и третьего интеграторов.
СмотретьЗаявка
4073496, 25.04.1986
ТОЛЬЯТТИНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ИОНОВ АНАТОЛИЙ НИКОЛАЕВИЧ, БАХАРЕВ НИКОЛАЙ ПЕТРОВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: динамических, звеньев, параметров, систем
Опубликовано: 07.09.1987
Код ссылки
<a href="https://patents.su/2-1335940-ustrojjstvo-dlya-izmereniya-parametrov-dinamicheskikh-zvenev-sistem-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для измерения параметров динамических звеньев систем управления</a>
Устройство для определения коэффициентов передачи блоков аналоговой вычислительной машины

Номер патента: 1032462
Опубликовано: 30.07.1983
Авторы: Каджардузов, Мырсин, Соколов
МПК: G06J 3/00
Метки: аналоговой, блоков, вычислительной, коэффициентов, передачи
...обнуления каждого из кодоуправляемых резисторов 1соединен с выходом соответствующегоэлемента И 9 третьей группы, подкпюченного первым входом к соответствующемувыходу регистра 5 адреса, а вторым входом - к шине 10 установки нуля устройства. Выходы кодоуправпяемых резисторов 1 соединены с информационнымивходами коммутатора 11, подкпюченного,управпяющими входами к выходам регистра 5 адреса, а выходом к входу ананого-цифрового преобразоватепя 12. Выходы разрядов преобразователя 12 соединены с входами регистра 1 Э памяти,подключенного выходами к первой группевходов блока 14 сравнения. Блок 14сравнения соединен второй группой входов с выходами регистра 3 чиспа, а выходом - с входом бпока 1 Б индикации.Каждый иэ кодоуправпяемых резисторов1...
Прибор для определения моментов входа и выхода челнока из зева на ткацком станке

Номер патента: 105039
Опубликовано: 01.01.1957
Автор: Мамедова
МПК: D03J 1/24
Метки: входа, выхода, зева, моментов, прибор, станке, ткацком, челнока
...выполнен в виде укрепленного на груднице ткацкого станка корпуса, на внешней стороне которого монтирована электронная газоразрядая лампа и кала, крытая люминофором, а внутри корпуса на общем валу укреплена световая трубка, снабженная зеркальной системой, и шестерня, сцепленная с зубчатым сектором, сидящим на рычаге, связанном через тягу с лопастью батана.Для обеспсчения вспышки электронной газоразрядной лампы на брусе батана монтированы контакты, замыкаемые челноком.На чертеже изображена схема прибора. Внутри корпуса д уствал, па котором укрепленавая трубка 8, имеющая зерксистему, и шестерня 9, Посцеплена с зубчатым сектосоединенным рычагом 11нирной тягой 12, связанныпастью 18 батана.ротные двикения па /. окрухкност)...
Измеритель времени выхода коэффициента передачи за заданные пределы

Номер патента: 1809396
Опубликовано: 15.04.1993
Авторы: Белоусов, Мырова, Савицкий, Соловьев
МПК: G01R 29/02
Метки: времени, выхода, заданные, измеритель, коэффициента, передачи, пределы
...импульсов 16 на счетчик 14 не проходят. Индикатор 15 показывает нулевое состояние счетчика 14,При воздействии на исследуемое линейное радиоэлектронное устройство импульсного дестабилизирующего фактора его коэффициент передачи изменяется, а непосредственно после воздействия начинает восстанавливаться, что ведет к изменению его выходного напряжения (фиг. 2 а). Это влечет разбалансирование схемы и появление на выходе дифференциального усилителя 4 переменного напряжения с частотой генератора 2 (фиг. 2 б), При выходе напряжения за пороговые значения, определяемые блоками 1 и 12, на выходе двух- порогового компаратора 5 появляется стробирующий импульс (фиг. 2 в), Через линию задержки 6, которая предотвращает многократные срабатывания...
Устройство для определения коэффициентов передачи блоков аналоговой вычислительной машины

Номер патента: 731445
Опубликовано: 30.04.1980
Авторы: Баду, Марков, Низяев, Смирнов
МПК: G06J 3/00
Метки: аналоговой, блоков, вычислительной, коэффициентов, передачи
...Идущие с,его выхода импульсы проходят счетчик 9 и преобразуются на выходе дешифратора 4 в напряжение, поступающее на соответствующие элементы И 3. На другие, входы элементов И 3 подается папряжение,из регистра б адреса цифровой вычислительной машины.Количество разрядов этого регистра равно количеству кадоуправляемых резисторов 1. После необходимых расчетов, которые производит ЦВМ, подается информация на соответствующие разряды регистра 6 адреса, Поскольку каждый разряд этого регистра связан с элементами И 3, то на входы их поступает сигнал с разрядов регистра б адреса, осуществляя тем самым выборку того кодоуправляемого сопротивления, на котором должно быть изменено значение коэффициента, передачи.При совпадении сигналов с выхода...
Устройство для регулирования натяжения полосы на выходе непрерывного прокатного стана

Номер патента: 882674
Опубликовано: 23.11.1981
Авторы: Дралюк, Козлов, Корытин, Критский, Куликов, Синайский, Хазанов
МПК: B21B 37/52
Метки: выходе, натяжения, непрерывного, полосы, прокатного, стана
...элемента сравнения соединенсо входом системы управления приводами валков предпоследней клети.На чертеже изображено предлагаемое устройство,Выход датчика 1 натяжения полосычерез элемент 2 сравнения, в которыйна второй вход вводится уставка натяженияТ 2, соединен с первым входом блока 3умножения, выход которого соединен совходом регулятора 4 натяжения,Выход регулятора 4 натяжения соединен соответственно со входом блока 5 регулируемого запаздывания, выход котсрого соединен с первым входом второгоэлемента 6 сравнения, выход регулятора4 натяжения соединен со вторым входомвторого элемента 6 сравнения, выходкоторого соединен со входом системы7 управления приводами валков последней клети, выход измерителей 8 толщины полосы за...
Предыдущий патент: Устройство для контроля обрыва сварных соединений
Следующий патент: Регулятор расхода
Случайный патент: Автоматизированная оросительная система