Способ стабилизации толщины изоляции кабеля и устройство для его реализации
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
СОЮЗ СОВЕТСНИХСОЦИАЛ ИСТИЧЕСНИХРЕСПУБЛИН 9) 111),2ома- може ци ОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ ОРСКОМУ СВИДЕТЕЛЬСТВУ(71) Всесоюзный научно-исследовакий и проектно-конструкторский итут по автоматизированному электводу,в промьппленности, сельскомстве и на транспорте(54) СПОСОБ СТАБИЛИЗАЦИИ ТОЛЩИНЛЯЦИИ КАБЕЛЯ И УСТРОЙСТВО ДЛЯ ЕАЛИЗАЦИИ(57) Изобретение относится к автике и вычислительной технике ибыть использовано при автоматиз производства кабелей в виде проводовс изолирующим покрытием. Цель изобретения - повьппение точности стабилизации. Устройство содержит отдающий барабан 1, толкающий механизм 2, экструдер 3, первый измеритель 4 диаметракабеля, охлаждающую ванну 5, второйизмеритель 6 диаметра кабеля, тянущиймеханизм 7, приемный барабан 8, электропривод 9 толкающего механизма,электропривод 10 экструдера, электропривод 11 тянущего механизма, вход 12задания частоты электропривода толкателя механизма, вход 13 задания частоты электропривода экструдера, вход14 задания частоты электропривода тянущего механизма, вход 15 коррекциитока электропривода тянущего механиз48 18тического значения наружного диаметра изолированного кабеля после зоны охлаждения от эталонного, пропорционально изменяя давление в экструдере и скорость подачи изолируемого кабеля, о т л и ч а ю щ и й с я тем, что, с целью повьппения точности стабилизации, разбивают во времени весь процесс стабилизации на последовательные -е такты, каждые Б из которых составляют 3-й цикл стабилизации, группируют каждые Е 3-х циклов в соответствующий ш-й цикл стабилизации, формируют управляющее воздействие по отклонению диаметра изолированного кабеля после экструдера видаУ., =СХ, +РУ14+111 1 э 1-1,На(,.с . ) ь Тгде С. ----------ЭФа, С(о; Тз, ) Тг. По окончании импульса "Ввод" в момент времени . элементы таймера 40 45 вновь устанавливаются в исходное состояние. Р =1 о л д Ф афС(д. 7 ,) 17 13022 читаться единицы, После прохождения числа импульсов, равного первоначально записанному числу, счетчик 91 устанавливается в состояние нулевого кода (момент времени 4 ). В этот момент на выходе сигнала заема ( 6 0) счетчика 91 появляется отрицательный перепад напряжения, вызывающий положительный перепад на выходе инвертора 97, который устанавливает в "0" 10 триггер 95. На инверсном выходе триггера появляется сигнал логической "1", .который поступает на входначальной установки счетчика 91, чем запрецает дальнейший счет импульсов, Одно временно сигнал логического "0" с прямого выхода триггера 95 поступаетна выход таймера 40, т.е. на вход 19 прерывания.Микропроцессор, получив .сигнал ,20 прерывайия и обработав его, выдает в моментна выход 36 ответный сигнал "Ввод", который, пройдя через инвертор 100, низким уровнем напряжения устанавливает триггеры 95 и 96. При 25 этом сигнал логической "1" поступающий с прямого выхода триггера 96 на вход 90 делителя 89 частоты, устанавливает триггеры последнего в "0", запрещая таким образом работу делите ля 89.После установки триггера 95 передним фронтом сигнала "Ввод" в моментсигнал логической "1", появившийся . на его прямом выходе, устанавливает 35 сигнал логической " 1" на входе 19.Сигнал логического "0", поступающий с инверсного выхода триггера 95 на вход начальной установки счетчика 91, подготавливает последний к следующему 40 циклу:приема кода и отсчета временного интервала. Формула изобретения 501. Способ стабилизации толщиныизоляции кабеля, заключающийся в том, что задают эталонные значения скорости подачи изолируемого кабеля и наружного диаметра изолированного кабеля, измеряют Фактические значения последнего при выходе изолированного кабеля из экструдера и из зоны охлаж-. дения для компенсации отклонения Фак" Р. 14зап 1 С(д 1 с)Х=Р а,+ -П 1,сР 1 ьав 1 ф--т - промежуток времени междуизмерениями диаметра кабеляпри выходе его из экструдера;- время транспортного запазЗаа1дывания при движении кабеляот экструдера до расположенного эа ним измерителя диаметра изолирующего покрытия;- дисперсия;- параметр корреляционнойфункции 1 значений, измеренных после экструдера;П - заданноеминимальное значение диаметра кабеля;- коэффициент усадки;Н - коэффициент вероятности события;О, - среднее значение диаметрана 3-м цикле;ас 1 - параметры процесса изоляциикабеля,а управляющее воздействие по отклонению диаметра изолированного кабеля после зоны охлаждения задают в видеУ =С Х +Р У.3, т 1 т 4,тгФ 1 п 4-1 рт+1а( т.;) Тпгде С- -----1 Ъ и. 1 Ф19 1302248 Х = 0 адр+ 1,п+1Б, - Рср, д- дисперсия; 5д. - параметр корреляционной функции значений величины диаметра кабеля, измеренногопри выходе из эоны охлаждения; 0Э - среднее значение диаметраср,мкабеля, измеренного при выходе из зоны охлаждения.Управляющие воздействия У.+, подают на каждом 1-м такте управления, 5 причем параметры С; и Р изменяют и воздействие 1 подают на первом1,Вт1-м такте каждого -го цикла а параметры С и Г изменяют на очередном 1-м такте, после того такта, в кото ром закончилось их вычисление.2, Устройство для стабилизации толщины изоляции кабеля, содержащее толкающий экструзионный и тянущий механизмы с соответствующими электро приводами, первый и второй измерители диаметра кабеля, установленные соответственно за экструдером и за зоной охлаждения, и измеритель скорости вращения электродвигателя толкающего ме ханизма, входом подсоединенный к информационному выходу электропривода толкающего механизма, о т л и ч а ю - щ е е с я тем, что, с целью повьппения точности стабилизации, оно содер- З 5 жит управляющую микроЭВМ, узел задания минимального значения диаметра кабеля, узел задания режима и параметров механизмов и узел сопряжения с объектом управления, соединенный ин формационными входами с первого по пятый соответственно с информационным выходом первого и с информационным выходом второго измерителей диаметра кабеля, с задающим выходом узла задания минимального значения диаметра кабеля, с задающим выходом узла задания режима и параметров механизмов и с информационным выходом измерителя скорости толкающего механизма, а аналоговыми управляющими выходами с первого по четвертый - соответственно с входом коррекции частоты вращения электропривода экструдера, и входом коррекции частоты вращения электропри 55 вода толкающего механизма, с входом коррекции скорости электропривода тянущего механизма и с входом прерыва 20ния управляющей ЭВМ, связанной первым и вторым информационными, первым и вторым управляющими выходами и информационным входом соответственно с шестым и с седьмым информационными входами, с первым и с .вторым управляющими входами и с кодовым выходом узла сопряжения с объектом управления, задающий аналоговый выход узла задания минимального диаметра кабеля подключен к входу задания частоты вращения электропривода экструдера, к входу задания частоты вращения электропривода толкающего механизма и к входу задания тока электропривода тянущего механизма.3. Устройство по п.1, о т л и ч а - ю щ е е с я тем, что узел сопряжения с объектом управления содержит блок контроля информационных и управляющих сигналов, блок ввода дискретных пассивных сигналов, блок вывода аналоговой информации, программируемый тай-. мер и пять регистров передачи данных, шестой и седьмой информационные, первый и второй управляющие входы узла соединены соответственно с входами младших и с входами старших разрядов, с первым и с вторым управляющими входами блока контроля информационных и управляющих сигналов, информационный выход которого подключен к информационному входу программируемого таймера, к шестому информационному входу блока ввода дискретных пассивных сигналов и к информационному входу блока вывода аналоговой информации, первый управляющий выход блока контроля йнформационных и управляющих сигналов подсоединен к первому управляющему входу программируемого таймера и к первому управляющему входу блока ввода дискретных пассивных сигналов, второй управляющий выход блока контроля информационных и управляющих сигналов соединен с вторым управляющим входом программируемого таймера, с вторым управляющим входом блока ввода дискретных пассивных сигналов и с управляющим входом блока вывода аналоговой информации, информационный выход блока ввода дискретных пассивных сигналов подключен к кодовому выходу узла, информационные входы которого с первого по пятый связаны через соответствующие регистры передачи данных с соответствующими информационными входами блока ввода дискретных21 13022 пассивных сигналов, управляющие выходы которого соединены с управляющими входами соответствующих регистров передачи данных, первый и второй выходы блока вывода аналоговой информации соединены соответственно с первым и с вторым аналоговыми управляющими выходами узла, третий аналоговый управляющий выход которого подключен к выходу программируемого таймера. 10.4. Устройство по п.З, о т л и ч а - ю щ е е с я тем, что блок ввода дискретных пассивных сигналов содержит дешифратор адреса, триггер, формирующий регистр, первый и второй инверто ры, вход и выход первого инвертора соединены соответственно с вторым управляющим входом блока и с Б-входом триггера, Р-вход которого является входом логического "О" блока, а С вход соединен с выходом второго инвертора, вход которого связан с первым управляющим входом блока и с управляющим вхбдом Формирующего регистра, входы .разрядов и выходы которого связаны соответственно с соответствующийи информационными входами блока и с48 22. информационным выходом блока, информационный, управляющий входы и каждый адресный выход дешифратора адреса подсоединены соответственно к шестому информационному входу блока, к инверсному выходу триггера ик соответствующему управляющему выходу блока.5. Устройство по п.2, о т л ич а ю щ е е с я тем, что блок вывода аналоговой информации содержит два регистра, два цифроаналоговых преобразователя, дешифратор адреса и два операционных усилителя, информационные входы регистров и дешифратора адреса соединены с информационным входом блока, управляющий вход, первый и второй адресные, выходы дешифратора адреса связаны соответственно с упра" вляющим входом блока, с входами синхронизации первого и второго регистров, выходы первого и второго регистров подключены к входам соответственно первого и второго цифроаналоговых преобразователей, связанных. выходами через первый и второй операционные усилители соответственно с первым и вторым выходами блока,27 Ед.Чер ПодписиСССР аказ д. 4/ изводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,вМ ид Ьу 15/46 ВНИИПИ Государств по делам изобре 113035, Москва, Ж1302248 35 ма, управляющую микроЭВМ 16, узел 17сопряжения с объектом управления, параллельный интерфейс 18, вход 19 прерывания управляющей микроЭВМ, узел 20задания минимального значения диаметра кабеля, узел 21 задания режима параметров механизмов, измеритель 22Скорости толкающего механизма, информационные входы 23-28 узла 17, аналоговые выходы 29 и 30 узла 17, входы31 и 32 коррекции частоты электроприИзобретение относится к автоматикеи вычислительной технике и может быть использовано при автоматизации производства кабелей в виде проводов с изолирующим покрытием.Цель изобретения - повьппение точности стабилизации.Сущность изобретения состоит в создании дополнительного контура регулирования по отклонению диаметра изоляции кабеля, статистической обработке результатов измерений, величин отклонений диаметров пластичной и отвердевшей изоляции и использовании статистических данных при регулировании параметров процесса нанесения изоляции.На фиг. 1 представлена функциональная схема кабельного агрегата с системой автоматического управления электроприводами механизмов на основе управляющей микроЭВМ; на фиг,2 структурная схема узла сопряжения управляющей микроЭВМ с кабельным агрегатом; на фиг.3 - структурная схема блока вывода аналоговой информации; на фиг,4 - схема программируемого таймера;, на фиг.5 - диаграмма циклов работы устройства; на фиг,6 временные диаграммы, поясняющие работу программируемого таймера.На фиг. 1-4 обозначейы: отдающий барабан 1, толкающий механизм 2, экструдер 3, первый измеритель 4 диаметра кабеля, охлаждающая ванна 5, второй измеритель 6 диаметра кабеля, тянущий механизм 7, приемный барабан 8, электропривод 9 толкающего механизма, электропривод 10 экструдера,водов толкающего и экструэионного механизмов. Сущность изобретения состоит в создании дополнительного контурарегулирования по отклонению диаметракабеля, статистической обработке результатов измерений величин отклонений диаметров после экструдера и после зоны охлаждения и использованиистатистических данных прирегулировании параметров процесса нанесенияизоляции, 2 с. и 3 з.п. ф-лы, 6 ил. 2электропривод 11 тянущего механизма,вход 12 задания частоты вращенияэлектропривода толкающего механизма,вход 13 задания частоты вращения 5 электропривода экструдера, вход 14задания частоты вращения электропривода тянущего механизма, вход 15 коррекции тока электропривода тянущегомеханизма, управляющая микроЭВМ 16, 10узел 17 сопряжения с объектом управления, интерфейс 18, вход 19 прерывания управляющей микроЭВМ, узел 20задания минимального значения диаметра кабеля, узел 21 задания режима и,параметров механизмов, измеритель 22скорости вращения электродвигателятолкающего механизма, аналоговый выход 23 узла задания минимального диаметра кабеля, выход 24 первого измерителя диаметра кабеля, выход 25 второго измерителя диаметра кабеля,задающий выход 26 узла задания минимального диаметра кабеля, задающийвыход 27 узла задания режима и пара,метров механизмов, информационный вы-.выход 28 измерителя скорости вращения электродвигателя толкающего механизма, первый 29 и второй 30 аналоговые управляющие выходы узла сопряжения, входы 3 1 и 32 коррекции частотывращения электроприводов толкающегои экструзионного механизмов, блок 33контроля информационных и управляющихсигналов, информационный выход 34 узла сопряжения, информационный выход 35 блока контроля, первый 36 и второй 37 управляющие выходы блока контроля. Узел 17 сопряжения с объектом управления содержит блок 38 ввода дискрет3 13022 ных пассивных сигналов, блок 39 вывода аналоговой информации, программи-руемый таймер 40, регистры 41 - 45 передачи данных узла 17, кодовый выход 46, шестой 47 и седьмой 48 инфор мационные входы узла 17, первый 49 и второй 50 управляющие входы узла 17. Блок 33 контроля информационных и управляющих сигналов содержит триггерный регистр 5 1, вход 52 синхрони зации регистра 5 1, инверторно-усилительный регистр 53 усилителей-формирователей 54 и 55. Блок 38 ввода дискретных пассивных сигналов содержит дешифратор 56 адреса, вход 57 5 управления дешифратора адреса, входы 58 разрядов формирующего регистра, триггер 59, инверторы 60 и,61, формирующий регистр 62, вход 63 управления формирующего регистра, выходы 64-68 20 дешифратора адреса, входы 69-73 управления регистрами передачи данных.Блок 39 вывода аналоговой информации содержит триггерные регистры 74 и 75, входы 76 и 77 синхронизации 25 триггерных регистров, цифроаналоговые преобразователи 78 и 79, дешифратор 80 адреса, операционные усилители 81 - 83, резисторы 84-87.Программируемый таймер 40 содержитЗО задающий генератор 88 прямоугольных импульсов, управляемый делитель 89 частоты импульсов, вход 90 начальной установки делителя 89, счетчик 91, канал 92 вывода кода временного интервала, дешифратор 93 адреса, канал 94 вывода адреса программируемого таймера, триггер 95 прерывания, триггер 96 запуска счета, инвертор 97, элемент 98 задержки, элемент И-НЕ 99 40 и инвертор 100.На фиг. 1 также обозначены: двигатели 101, тахогенераторы 102, элементы 103 нагрузки, датчики 104 тока, тиристорные преобразователи 105, им пульсные формирователи 106, регуляторы 107 тока, регуляторы 108 скорости, сумматоры 109 и 110, задатчик 111 тока, источник 112 и приемник 113 света.Сигналы напряжения на выходах ло гических элементов ячейки программируемого таймера (фиг.б):.0 - сигнал "Вывод" - сигнал синхЬбронизации вывода кода из ЭВМ;0 - сигнал "Ввод" - сигнал сикх38рониэации ввода данных;П - напряжение на инверсном выхо 95де триггера 95; 48 40 - напряжениена инверсном выхо 96де триггера 96;П 9, - выходной сигнал инвертора 97;П - выходной сигнал элемента 99;П, - выходной сигнал инвертора 100;Ц, - сигнал прерывания на выходеячейки таймера 40;- момент прихода сигнала Вывод7 - момент записи кода временногоинтервала Тв счетчик;- момент запуска счета;Т - момент окончания отсчета вре 4менного интервала Т;Т - момент принятия таймером 40исходного состояния.Система автоматического управления и регулирования каждого электропривода содержит аналоговую и цифровую части,Аналоговая часть имеет в своем составе регулятор частоты вращения, регулятор тока и узел импульсно-фазового управления тиристорами, Установка заданного режима работы электроприводов толкающего 2, экструзионного 3 и тянущего 7 механизмов осуществляется путем подачи определенных значений аналоговых сигналов напряжения на входы 12 - 14 соответственно. Тянущий механизм 7 работает в режиме постоянного натяжения кабеля, что достигается работой его электропривода 1 1 в режиме поддержания неизменного тока якоря двигателя, устанавливаемого сигналом напряжения по входу 15.Цифровая часть устройства управления электроприводами кабельного агрегата содержит оптический 4 и микро- метрический б цифровые измерители диаметра, управляющую микроЭВМ 16, узел 17 сопряжения микроЗВМ с объектом управления, интерфейс 18 (канал связи) между управляющей ЭВМ и узлом сопряжения, вход 19 прерывания, узла задания режима 21 и минимального значения диаметра кабеля 20 и цифровой измеритель 22 скорости толкающего механизма.Для повьппения надежности функционирования экструзионного кабельного агрегата регулирование производится в отклонениях от среднего значения диаметра. Зто означает, что при отключениях системы регулирования кабельный агрегат продолжает работать нормально, но без цифровой коррекции, так как частоты вращения элект(1) 10 где 1 - расстояние от дорна экструдера до оптического датчика;11 - скорость движения кабеля,определяемая по скорости15электропривода толкающего механизма.После набора массива измеренных значений диаметра П,; из И значений вычисляют первую дисперсию диаметракак разность между средним квадра 20 том П ; результатов измерения диаметра П; и квадратом среднего арифметического (П) этих же измерений25(3) (4) гдеП - 1-е текущее значение изме 13ряемой величины диаметра, соответствующее 3-й выборке, 3.=1,2,3 И. 1=0,1,2,3.,1Подсчитывают статическую ошибку Я.; как разность между фактическим средним значением диаметра П и эа 40 данием предыдущего шага П8=П; -П . (5)На начальном шаге самонастройки для 1=0"Б; принимается равной нулю.Полученное значение дисперсии В.45 используется для вычисления слагаемого уставки дП среднего диаметра изоляции по заданной вероятности Г не -выхода за пределы меньше минимального значения диаметра П . Эта вероят 50 ность равна функции Лапласа Е(П ьП (ПСП +дП )=Ф( - -) (6)дПср 1 ер 5 130224 роприводов толкающего и экструзионного механизмов по входам 12 и 13 остаются установленными в соответствии с технологической картой на данный типоразмер кабеля. Однако Флуктуации толщины изоляции при этом возрастут.Время транспортного запаздывания,/Р 2откудадП= 2 Х Й =Н Й =2,588 Ы .(7)Так как Н и Г связаны между собой однозначно, вместо 1 задается Н в виде константы.Затем вычисляется параметр Ы первой корреляционной функции значений диаметров К .(с)=д. 1Расчет величины д производится следующим образом: рассчитываются три значения корреляционной функции (О), Р (10), Р (20); осуществляется центрирование этих значений; выполняется аппроксимация корреляционной функции экспонентной и вычисляются три значе-, ния коэффициента у показателя степени этой экспоненты производится усреднение вычислительных значений сс;Вычисление ординат корреляционной ункции осуществляется по формулеМ-МК, (М)=-(8)Затем путем вычитания из полученных значенийквадрата среднего значения диаметра (П,р ) находятся центрированные значения корреляционной функ ции Ко, К , КГ(О) - (П, )К;д =К (20) - (П, )(9) Далее производится аппроксимация центрированной корреляционной функции экспонентойк,(м т,)=к, 1 (10)Для вычисления коэффициента используются следующие соотношения:(13) 55 По заданной величине 2=0,99 с помощью обратной интерполяции по формуле Лагранжа вычисляется аргумент функции (6) сЮ = в (Еп К. -Рп К )17 1302248Суммируя и усредняя, получаем искомое значение параматра о =-(сС +сА +с/-, ) . 1 3 Й 1 з(18) По найденным величинам 7, , и сС, определяют параметры первого регулятора диаметра кабеля С,. и, Р,.10С ( с.у 3 ат) Т 15Р. =1 1 о(16)анС (с" и)где а ,Ь,с,д - величины, зависящие от параметров электроприводов экструзионного и толкающего механизмов.20 1Далее по заданному с помощью программных переключателей минимально , допустимому значению диаметра кабеля Р коэффициенту усадки О статической ошибке Я, выходному сигналу второго регулятора диаметра кабеля У . , дисперсии б. и заданному коэфФициенту Н вероятности попадания диаметра Р за пределы меньше Р вы рабатывают задание первому регулятору диаметра кабеля по соотношениюРзаал+ Рмнн 0 81нф(17) Коэффициент усадки изоляции кабеля равен отношению среднего значения ди аметра кабеля, измеренного оптическим измерителем Рк среднему значению диаметра, измеренному микрометрическим измерителем Р,РсРй.Р,Процедура определения выходного 1сигнала второго регулятора диаметракабеля У, описана ниже.Вычисленное в (17) значение задания первому регулятору диаметра кабеля Р ;+, сравнивают с текущим значением диаметра Р;, получая входной сигнал первого регулятора, , -Р,-Р (19)по которому формируют управляющее воздействие по отклонению для электроприводов .экструэионного и толкающегоехазмов в сооеи с соотноше ниемЭто управляющее воздействие преобразует в аналоговый сигнал напряжения, который затем подают на входы31 и 32 коррекции частоты вращениясоответственно электроприводов 9 и 10толкающего 2 и экструзионного 3 механизмов на каждом д-м такте управления. Параметры С и Р вычисляют один3,раз в течение цикла 1 самонастройкипервого контура регулирования и изменяют после очередного х-го такта, вкотором закончилось их вычисление.Каждый -й такт управления содержит три интервала (Фиг.5):интервал Т, -С в котором выполняется прием прерывания, переход на подпрограмму обслуживания прерывания,считывание и анализ системной информации, прием технологической информации;интервал Т,- , в котором выполняются реализация функций первого и второго регуляторов диаметра кабеля иосуществляется выход из прерывания;интервал-С , используемый подпрограммами самонастройки.Прерывания по таймеру и реализацияфункций регуляторов диаметра выполняются в каждом -м такте управления,а самонастройка, т.е, расчет коэффициентов регулятора Си Р, выполняется после набора массива из Б значений диаметра Р;, Она осуществляетсяв течение нескольких тактов управления (фиг,5) и занимает в каждом д-мтакте интервал времени от момента2до момента С следующего ( +1)-готакта, После окончания вычисления значений С и Р, в момент времени(5-й такт, Фиг,5) осуществляется смена старых значений С и Р. на4-1 4-1.новые вновь рассчитанные.Последние не изменяются на протяжении последующих И 1.-х тактов управления,Одновременно через вторичные промежутки времени Т , больше в И раз2первичных Т измеряют вторым измерителем значения диаметра кабеля Р;после прохождения из зоны охлаждения.и время транспортного запаздыванияот экструдера до второго микрометрического измерителя.Время транспортного запаздывания7 . вычисляется по формуле 1С ананд О(21) где 1 - расстояние от дорна экструдера до микрометрического датчика;(29) 9Б,. - скорость движения кабеля,определяемая по скоростиэлектропривода толкающегомеханизма.По предварительно выполненной дискретной выборке значений диаметра Р.от второго измерителя вычисляют вторую дисперсию диаметра 6как разность,где Р - средний квадрат результатов измерений диаметра:(Р ). - квадрат среднего арифметического этих же измерений:(24)20По этой же выборке вычисляют параметр ы второй корреляционной функциипдиаметра К (М) и вторую дисперсию ЕОрдинаты второй корреляционнойфункции равны 25 ь - мК (М)= - - Р, Р, (25)Путем вычитания из полученных значений квадрата среднего значения диаметра (Р, ) находят центрированные значения корреляционной функцииК ,=К (О) - (Р. )К ,=К ( 10) - (Р ) (26)к =к (2 о) - (Р, )Затем осуществляют "выпрямление" и последующую аппроксимацию корреляционной функции К . экспонентой. Вычисляются три значения величиныЫ Ю - в в -(тп К -тп К );1ф" М Тэ 1 ф1 ю = --- (Хп К -1 п К ); (27) 1 фМ Т я й(М-М ) ТтЯ После суммирования и усредненияполучают искомое значение параметра 1 Сф =-3(.,+д д+ .4. (28)ПО найденным величинам с., иааф, определяют параметр второго регулятооа диаметра С и Р 55 Затем вычисляют статическую ошибку Я, как разность между фактическимсредним значением диаметра Р. и за"данием предыдущего шага Р а.,Рср етз Р асэ г( 3 1 )Далее по заданному с помощью программных переключателей минимальнодопустимому значению диаметра кабеляР, статической ошибке Я , дисперсии (и заданному коэффициенту Н вероятности попадания диаметра Р запределы меньше Р определяют задание второму регулятору диаметра посоотношениюРад ъ+Рмин 8,+Н Й(32)Это задание сравнивают с текущимзначением диаметра Р , получаявходной сигнал второго регулятора:по которому формируют выходной сигналвторого регулятора диаметра кабеля всоответствии с соотношениемЦифровое зйачение сигнала У; ис 1пользуют при вычислении задания первому регулятору диаметра кабеля посоотношению 17, где оно является одним из слагаемых,Параметры С и Г вычисляют посленабора массива из значений диаметраР, только один раз за ш цикл, т.ецикл самонастройки второго контурарегулирования и изменяют их после очередного -го такта, в котором окончилось их вычисление. После этого параметры С и Р не изменяются на протяжении последующих Ь, 3-х циклов.Устройство работает следующим образом.Через заданные промежутки времениТ таймер 40 на входе 19 вырабатываетперепад напряжения с высокого на низкий уровень, который вызывает прерывание работы процессора. После приемапрерывания в момент 1 (фиг.5) процессор в соответствии с программойработы переходит на подпрограмму обслуживания прерывания, в начале которой выполняет сброс таймера. В результате сброса таймера на входе 9 вновьпоявляется высокий уровень напряжения, т.е. таймер подготавливается кновому циклу работы.Затем процессор с выхода узла 21код режима работы кабельного агрегатаи анализирует его. Если оператором8 12.2 - с реализацией второго регулятора диаметра кабеля и без самонастройки;3 - с реализацией первого регулятора диаметра кабеля и самонастройкой первого контура регулирования; 4 - с реализацией второго регулятора диаметра кабеля и самонастройкой второго контура регулирования.В каждом -м такте после считывания и анализа системной и технологической информации процессор анализирует логическую информацию о номерах , т.е. сравнивает текущее значение номеров ,3 с заданными фиксированными значениями Б,Ь. Счетчик номеров -х тактов управления наращивается на единицу и производится проверка: равно ли д максимальному значению М, Если хИ то, осуществляется переход программы на программный блок реализации первого регулятора, если =И, то счетчик номера тактасбрасывается на нуль и осуществляется прием значения диаметра кабеля Р от измерителя 6 с его выхода 25 в узел 17, а также частоты вращения д толкающе,го механизма 2 с выхода 28 измерителя 22, При =И в массиве значений диаметра кабеля Р; содержится й значений, что позволяет осуществить самонастройку первого контура регулирования, поэтому в слове состояния программы устанавливается бит признака 11 130224установлен автоматический режим работы с выдачей управляющих воздействий,то процессор вновь запускает программируемый таймер 40 с интервалом Т,и считывает остальные параметры системной информации,В начале каждого -го такта управления после прерывания работы процессора таймером, процессор в соответствии с заложенной в постоянном запоминающем устройстве микроЭВМ программой осуществляет считывание системнойи технологической информации.Системной информацией являетсяследующая информация, задаваемая оператором кабельного агрегата с помощьюпрограммных переключателей: код режима работы кабельного агрегата; уставказаданного значения минимального диаметра кабеля; значения коэффициентов 20и параметров,Технологической информацией является следующая информация, отражающая протекание технологического процесса изолирования кабеля: показания оптического измерителя диаметра кабеля; показания микрометрического измерителя диаметра кабеля; показания измерителя скорости электропривода кабельной линии,Заданная операФором в узле 20 (Фиг,1) уставка минимального значения диаметра кабеля Рин преобразуется в этом же узле в аналоговый сигнал на 35 пряжения и по выходу 23 передается на входы 12 и 13 электроприводов 9 и 10 толкающего 2 и экструзионного 3 механизмов соответственно, обусловливая определенные значения их устано вившейся частоты вращения, Эта же уставка 0 с выхода 26 считывается через узел 17 в микроЭВМ 16, где заносится в память и используется в дальнейших вычислениях для осуществ5 ления цифровой коррекции частоты вращения электроприводов 9 и 10 в соответствии с предлагаемым способом.Далее считываются и заносятся в память цифровые значения коэффициентов и технологической информации с выходов 24, 25 и 28.В зависимости от интервала времени и состояния устройства для управления электроприводами кабельного агрегата в процессе изолирования наблюдаются -е такты управления следущих типов: 1 - с реализацией первого регулятора диаметра кабеля и без самонастройки; готовности первого массива к статистической обработке.Далее наращивается на единицу номер цикла 3 и производится проверка, равно ли 3 максимальному значению Ь, Если 3 ФЬ, то осуществляется переход программы на программный. блок реализации регуляторовЕсли 3=Ь, то счетчик номера цикла сбрасывается на нуль, после чего устанавливается бит признака готовности второго массива к статистической обработке, т,е, готовности к осуществлению самонастройки второго контура регулирования. В результате анализа информации о номерах" определяется, какому типу относится данный такт управления, после чего с момента времени г. (Фиг.5)реализуется либо первый регулятор диаметра кабеля формулы (17) - (20), либо второй - формулы (31) - (34), который реализуется только на первом 1-м такте управления, следующем после очередного момента измерения диаметра кабеля вторым измерителем в каждом1302248 14 Номербита 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00 Содер- Код адресажимое канала вводимыхданных Производный код текущем 1-м цикле. После этого в момент времени с (фиг,5) подпрограмма обслуживания прерывания заканчивается и процессор выходит из прерывания в программу самонастройки, В завнсимос ти от сочетания текущих значений номеров Х,1 и параметров И, осуществляется самонастройка либо первого контура регулирования в соответствии с формулами (8) - (16), либо второго - 10 в соответствии с формулами (25) - (30).Цифровое значение управляющего воздействия, полученное в устройстве согласно предлагаемому способу преобразуется далее в блоке 39 в аналоговые 15 сигналы напряжения, которые с выходом Так как в предлагаемом устройстве 25 имеется пять каналов ввода дискретной информации с 24 по 28, то каждому из этих каналов соответствует свой системный адрес в шести старших битах (с 10 по 15) выводимого из микроЭВМ 30 слова. Путем перестановки проводников-перемычек в узле задания адреса дешифратора 56 адреса каналов ввода можно изменять. Пусть для определенности процессор микроЭВМ выдал адрес канала для ввода от узла 21 кода ре . жима работы устройства. При этом код старшей части выводимого через информационный выход параллельного интерфейса слова по входу 48 попадает на щ вход регистра 51 (фиг.2), а код младшей части - на соответствующие выходы регистра 53, Одновременно с выдачей адреса процессор вырабатывает сигнал Вывод , который с управляющего выхода параллельного интерфейса микроЭВМ по входу 50 узла 17 поступает на вход 52 синхронизации регистра 51, стробирует его, в результате чего на выходах регистра 51 устанавливается адрес 50 выбранной ячейки, в данном случае адрес канала для ввода от. узла 21 кода режима работы устройства. Кроме того, сигнал "Вывод поступает через усилитель-формирователь 55 на выход блока у 33 узла 17. Выведенное из микроЭВМ информационное слово через регистр 53 усилителей-формирователей блока 33 поступает на шину(выход) 35, по кото 29 и 30 узла 17 (фиг.1) подаются соответственно на входы 31 и 32 коррекции частоты вращения электроприводов 9 и 10 толкающего и экструзионного механизмов, в результате чего осуществляется стабилизация диаметра изоляции кабеля.Для осуществления ввода системной и технологической информации процессор управляющий микроЭВМ 16 выдает через информационные кодовые выходы 47 и 48 код, включающий адрес канала, с которого вводится данные. Формат выводимого процессорам слова данных при этом следующий: рой оно .проходит на информационныйвход блока 38. Если выданный процессором адрес соответствует адресу блока 38, то срабатывает узел заданияадреса, входящий в состав дешифратора 56, и разрешает работу последнего.По сигналу "Вывод", поступающему свыхода 37 через инвертор 60 на входустановки триггера 59, на его инверсном выходе появляется низкий уровеньнапряжения, который поступает.на вход57 дешифратора 56. При этом дешифратор включается и если адрес на еговходе соответствует адресу информации, вводимой от узла 21, то на выходе 67 дешифратора 56 устанавливаетсясигнал напряжения высокого уровня,который поступает на вход 72 управления регистра 44 передачи данных. Споявлением этого сигнала разрешаетсяпрохождение параллельного двоичногокода информации о режиме работы устройства с выхода 27 через регистр 44на шину 58. Затем процессор вырабатывает сигнал управления "Ввод", который с управляющего выхода параллельного интерфейса микроЭВМ по входу 49через усилитель-формирователь 54 поступает на выход 36 узла 17. При появлении импульсного сигнала "Ввод" навходе 63 появляется высокий уровеньнапряжения, который разрешает прохождение информации о коде режима с приемных шин 58 через регистр усилителей-формирователей 62 на выход 34.248 16Полученные в результате вычислений с помощью микроЭВМ согласно предлагаемому способу цифровые значения управляющего воздействия преобразуются на каждом такте управления в аналоговые сигналы напряжения. Для осуществления этого преобразования процессор микроЭВМ 16 выдает адрес блока 39, включающий в себя адрес канала вывода аналоговой информации и приформированный к нему двоичный код расчетного управляющего воздействия. Формат выводимого процессором слова данных при этом следующий: Номербита 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00 Номер кана- Двоичный код управляющего воздейла ствия со знаком Адресячейки Содержимое При этом код старшей части выводимого через информационный выход параллельного интерфейса и контролерслова (ВД 10 ВД 15) по шине 35 попадает на вход дешифратора 80 (фиг, 3),а код младшей части (ВДОО-ВДО 9) - насоответствующие входы 74 и 75 узлов.Одновременно с выдачей адреса процес-З 0сор вырабатывает сигнал "Вывод", который поступает на выход 37, а с неюна вход синхронизации регистра 80 истробирует его.Аналогично вышеописанному только35с другими адресом работает и второйканал блока 39.4В процессе работы устройства длястабилизации диаметра кабеля программа работает циклически с периодом 40дискретности Т, зависящим от настройки таймера 40, Величина периодадискретности определяется заранее,вводится в программу, и может корректироваться в зависимости от хода нроцесса изолирования кабеля,Алгоритм функционирования таймера40 поясняется временными диаграммами,.приведенными на фиг.6. Для формирования некоторого временного интервала,соответствующего периоду Т, следования -х тактов управления, необходимо, чтобы микропроцессор выдал адрестаймера 40 по каналу 94 код формируемого временного интервала по каналу92 и импульсный сигнал "Вывод" навыход 37.При поступлении в момент времениприсвоенного программируемому тай 15 1302 По этому же сигналуВвод процессор управляющей микроЭВМ 16 принимает через блок 33 и выход 46 код информации о заданном режиме работы устрой 11стваОдновременно сигнал Ввод поступающий с магистральной шины 36 управления "Ввод" через инвертор 61 на синхронизирующий вход триггера 59, сбрасывает этот триггер, запрещая тем самым работу дешифратора 56 и выдачу 10 сигналов на выходы 64 - 68, разрешающих по входам 69 - 73 прохождение дискретной информации через регистры 41 - 45, поступающей на выходы 24 - 28. меру адреса на выходе дешифратора 93появляется сигнал логической 1 , который разрешает прохождение импульсного сигнала "Вывод" через элемент 99,Запись кода заданного интервала времени, выставленного на линиях канала92 в счетчик 91, осуществляется передним отрицательным фронтом сигнала,вырабатываемым на выходе элемента 99в момент Т . При этом на выходе заемаЫО) счетчика 91 появляется сигналлогической "1", показывающий, что всчетчик записан ненулевой код. На выходе инвертора 97 соответственно появится сигнал логического 0".Элемент 98 задержки необходим для того, чтобы задержать до момента времени Т запись кода в счетчик 91 от 2носительно переднего фронта сигнала Вывод , появляющегося в момент, и дать таким образом закончиться переходным процессам в интерфейсе 18. Задним положительным фронтом импульса, вырабатываемого в момент 7 на выходез элемента 99, осуществляется установка в "0" триггера 96. Сигнал логического 11 10 с прямого выхода последнего поступает н а вход начальной установки 90 делителя 8 9 частоты , разрешая работу последнего .Начиная с момен та . 1 ремени сн а вход обратного счета счетчика 9 8 н ачин ают поступать та к то вые импульсы с делителя 8 9 , вследствие че г о и 3 п ервон ачальн о установленного содержимого счетчика начинают по следо в ат ел ьн о вы
СмотретьЗаявка
3495589, 30.09.1982
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ ИНСТИТУТ ПО АВТОМАТИЗИРОВАННОМУ ЭЛЕКТРОПРИВОДУ В ПРОМЫШЛЕННОСТИ, СЕЛЬСКОМ ХОЗЯЙСТВЕ И НА ТРАНСПОРТЕ
ИВАНОВ ГЕЛИЙ МИХАЙЛОВИЧ, НИКИТИН БОРИС КУЗЬМИЧ, ИЛЬИН АЛЕКСЕЙ ИГОРЕВИЧ, ПОГОРЕЛОВ ВЛАДИМИР ПАВЛОВИЧ, НИМВИЦКИЙ БОРИС ВАДИМОВИЧ, СЕЛИВАНОВ ЭДУАРД ПЕТРОВИЧ
МПК / Метки
МПК: G05D 5/02
Метки: изоляции, кабеля, реализации, стабилизации, толщины
Опубликовано: 07.04.1987
Код ссылки
<a href="https://patents.su/14-1302248-sposob-stabilizacii-tolshhiny-izolyacii-kabelya-i-ustrojjstvo-dlya-ego-realizacii.html" target="_blank" rel="follow" title="База патентов СССР">Способ стабилизации толщины изоляции кабеля и устройство для его реализации</a>
Способ формирования периодического сигнала с заданным значением коэффициента гармоник

Номер патента: 1241145
Опубликовано: 30.06.1986
Авторы: Бухалов, Голубенко, Ковальчук, Костюк
МПК: G01R 23/20
Метки: гармоник, заданным, значением, коэффициента, периодического, сигнала, формирования
...а вторымвходом соединенный с выходом источника 1 синусоидального сигнала и пер 1вым входом блока 7 сравнения по среднеквадратическому значению, второйвход которого соединен с выходоммасштабного преобразователя 4, причемуправляющий вход масштабного преобра- зователя 4 через блок 8 управлениясоединен с выходом блока 7 сравненияпо среднеквадратическому значению.Выход сумматора 6 является выходомустройства,Устройство, реализующее предлагаемый способ, работает следующим образом.Источник 1 синусоидального сигналаформирует синусоидальный сигнал пер-вой гармоники с малым значением коэффициента гармоник (менее 0,001 ).Умножитель 2 частоты формирует синусоидальный сигнал второй гармоники,а затем блок 3 .произвольного искажения (например,...
Сигнализатор заданного значения частоты
Номер патента: 1057939
Опубликовано: 30.11.1983
Автор: Заморин
МПК: G06F 7/04
Метки: заданного, значения, сигнализатор, частоты
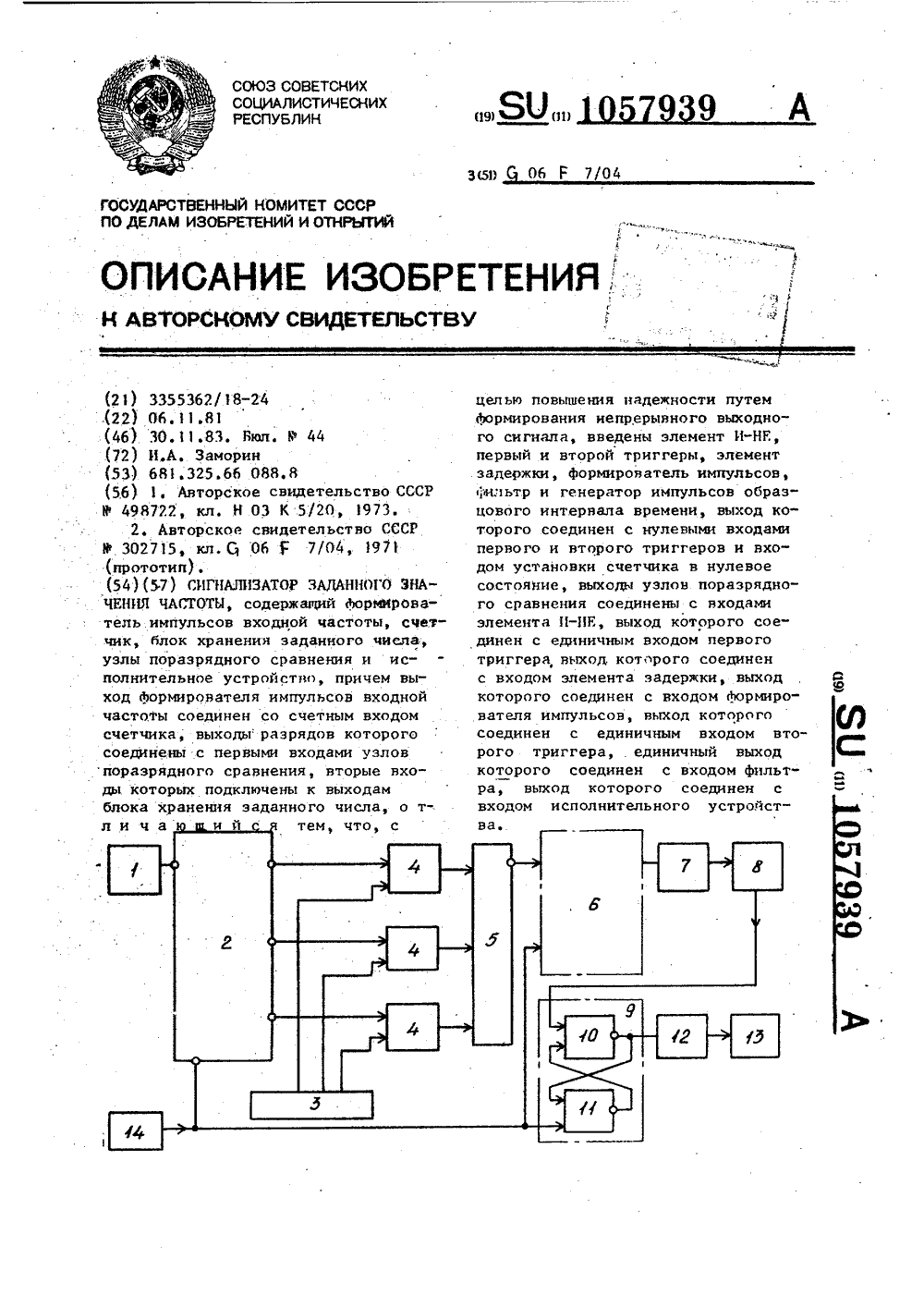
...выходного сигнала, если частота входного сигнала достигла заданного значения,Поставленная цель достигается тем, что в сигнализатор заданного значения частоты, содержащий Аормирователь импульсов входной частоты, счетчик, блок хранения заданного числа, узлы поразрядного сравнения и исполнительное устройство, причем выход Аормирователя импульсов входной частоты соединен со счетным входом счетчика выходы разрядов которого соединены с первыми входами узлов поразрядного сравнения, вторые вхо" ды которых подключены к выходам блока хранения заданного числа, введены элемент И-НЕ, первый и второй триггеры элемент задержки, формирователь импульсов, Фильтр и генератор импульсов образцового интервала времени, выход которого соединен с нулевыми...
Устройство для измерения отклонения частоты от заданного значения

Номер патента: 1083123
Опубликовано: 30.03.1984
МПК: G01R 23/02
Метки: заданного, значения, отклонения, частоты
...ждущего генератора 2 и с входом формирователя 3 управляющих импульсов. Выход ждущего генератора 2 соединен с первым входом интегратора 4. Выход интегратора 4 соединен с первым входом блока 5 запоминания, второй вход которого соединен с выходом формирователя 3 управляющих импульсов. Выход блока 5 запоминания соединен с входом блока б нелинейности. Выход блока б нелинейности соединен с вторым входогл интегратора 4.На временной диаграмме (Фиг. 2) обозначены: сигнал на входе Формирователя импульсов Ов, сигнал на выходе Формирователя импульсов 0. сигнал на выходе генератора имйульсов эталонной длительности и амплитуды 02, сигнал на выходе Формирователя управляющих иглпульсов 03, сигнал на выходе интегратора 0 л, сигнал на выходе блока...
Устройство для получения заданных значений постоянного тока

Номер патента: 1328801
Опубликовано: 07.08.1987
Авторы: Блинов, Кулешов, Шилов, Шифрин
МПК: G05F 1/46
Метки: заданных, значений, постоянного
...Реально на выходе усилителя 11 имеется остаточное напряжение, обусловленное статической ошибкой системы 50 автоподстройки. Для исключения влияния статической ошибки следящей системы на точность воспроизведения и стабилизации тока это напряжение необходимо учитывать. Причем, если остаточное напряжение на выходе узкополосного усилителя 11, обусловленное изменением тока в катушках 2 и 3 и, следовательно, изменением В, имеет ту же фазу, что И напряжение на выходе узкополосного усилителя 12, то при изменении значения В фазы этих напряжений сдвинуты на 180 о. Поэтому в суммирующем усилителе 16 сигналы, обусловленные изменением В, складываются, а сигналы, связанные с изменением В , вычитаются.иВ синхронном детекторе 14 из суммарного...
Измеритель отклонений частоты от заданного значения

Номер патента: 1679404
Опубликовано: 23.09.1991
Авторы: Демьянчук, Лексин, Сугаков, Чистяков
МПК: G01R 23/00
Метки: заданного, значения, измеритель, отклонений, частоты
...импульсе с выхода генератора 3 сигнал на третьем выходе распределителя 17 исчезает, а на четвертом появляется. Триггер 6 переходит в состояние, когда на его прямом выходе появляется высокий уровень. Элемент И 4 подготавливается по второму входу и счетчик 7 переводится в режим, вычитания, С приходом переднего фронта следующего импульса с выхода генератора 3 сигнал на четвертом выходе распределителя 17 исчезает. Вместе с этим исчезает сигнал на выходе элемента ИЛИ 15, а на выходе элемента НЕ 11 появляется, разрешая счет счетчику 7. Одновременно через элемент И 4 приходит импульс на вычитающий вход счетчика 7. Код на выходе счетчика 7 уменьшается на единицу. При последующих импульсах с выхода генератора 3 процесс уменьшения исходного вида...
Предыдущий патент: Устройство для сбора и обработки информации
Следующий патент: Регулятор уровня жидкости
Случайный патент: Способ получения водной суспензии оксида магния