Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно-импульсным регулированием (шир) выходного напряжения и непосредственный преобразователь частоты для регулир
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
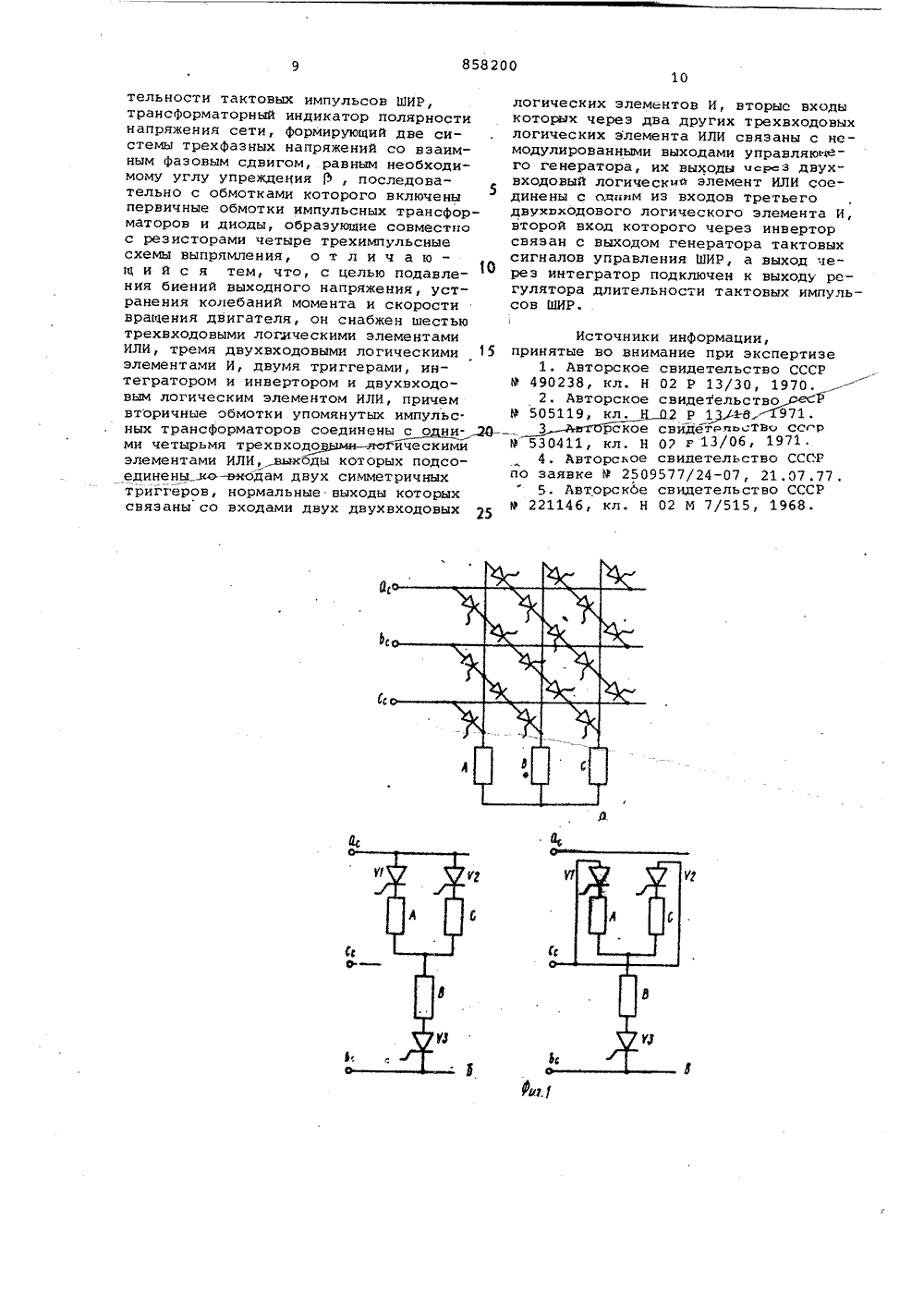
Союз Советския Социалистических РеспубликОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИ ВТИЛЬСТВУ пп 858200(22) Заявлено 131178 (2) 2685398/24-07 с присоединением заявки Йо(23) Приоритет -Государственный комитет СССР по делам изобретений и открытий(71) Заявител ктротехническийН.Д. Турцева язи осибирски нститут им(54) СПОСОБ УПРАВЛЕНИЯ НЕПОСРЕДСТВЕННЫМ ПРЕОБРАЗОВАТЕЛЕЧАСТОТЫ ДЛЯ РЕГУЛИРУЕМОГО ЗЛЕКТРОПРИВОДА С ШИРОТНО-ИМПУЛЬСНЫРЕГУЛИРОВАНИЕМ ВЫХОДНОГО НАПРЯЖЕНИЯ И НЕПОСРЕДСТВЕННЫИПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ РЕГУЛИРУЕМОГО ЗЛЕКТРОПРИВОДА я 0 Изобретение относится к пре овательной технике и может быть пользовано, например, для уира непосредственными преобразоват частоты с широтно-импульсным р ированием (ШИР) выходного напря для частотного регулирования э роприводов переменного тока.Известны способы управления преобразователями с ШИР выходного напряжения с несимметричной формой сигналов управляющих генераторов )1) и 23.Однако при таких способах управления,цля ограничения пусковых и динамических токов двигателя при его пуске 15 увеличивают частоту импульсов управляющего генератора, что усложняет схему управления и производит к росту потерь в элементах силовой цепи преобразователя. 2Известны также способы управления непосредственным преобразователем часстоты (НПЧ), которые позволяют ограничить напряжение преобразователя при пуске двигателя на сколь угодно 25 низких частотах 31 и (4),Наиболее близким к предлагаемому является способ управления непосредст. венным преобразователем частоты, который заключается в том, что сигналы 30 управления (Г -Г ) в выпрямительном и .инверторном режимах суммарной длительностью, равной углу управления, подают на управление тиристорными группами в последовательности: инверторный, выпрямительный, инверторный (фиг. 2),причем длительность первого инверторного импульса берут равной, а длительность следующего выпрямительного импульса - не более одной шестой части периода выходного напряжения )4.При таком способе управления преобразователем волна выходного напряжения состоит иэ двух последовательностей импульсов: стационарной и нестационарной; Стационарная последовательность импульсов задается тактовыми сигналами управляющего генератора и состоит иэ отрезков синусоидального напряжения питающей сети, ши рина которых определяется тактовыми сигналами ШИР. Формирование стационарной последовательности импульсов выходного. напряжения на интервале времени 0-1 (фиг. 2) поясняется при помощи схемы замещения тиристорно 1 о коммутатора (фиг. 1 б) .В соответствии с наличием сигналов управления(ГаГу и Го) в си 85820040 следовательности импульсов зависят отфазовых соотношений сети и сигналов ловой цепи тиристорного коммутаторавключены три тиристора: два в катодных группах выходных фаз Л и С иодин в анодной группе выходной фазыЕ. При таком включении тиристоров фазы нагрузки оказываются подключенными к двум линиям сети переменного то 5ка. При этом входное линейное напряжение может быть представлено какмгновенное значение выпрямленного напряжения О в трехфаэной схеме Ларионова (фиг. 2), Выходное напряжениена рассматриваемом интервале образуется как доля напряжения О . Аналогично описанному формируются импульсы стационарной последовательностина других интервалах времени, 1Нестационарная последовательностьимпульсов выходного напряжения обусловлена орядком чередования режимовработы преобразователя (выпрямительного или инверторного) и наличиемугла упреждения подачи управляющихсигналов в инверторном режиме,В момент времени 1 (фиг. 2) тиристоры катодных групп переводятся в такназываемый режим инвертирования тока,причем характер протекания процессовв этом режиме зависит от фазовых соотношений между сигналами управления инапряжением питающей сети. В связи стем, что в режиме инвертирования сигналы управления подаются на тиристорыс некоторым углом упрежденияпо отношению к моменту равенства фазныхЭДС сети, в паузах между регулируемыми по длительности тактовыми сигналами управления ШИР возможны два режимаработы силовой цепи; режим закорачивания нагрузки, при котором вне зоныуглов на нагрузке формируется нулевойуровень напрякения (фиг. 16) и режимработы, при котором на нагрузке формируются импульсное напрякение поддействием разности потенциалов линийсети в зоне действия угла ( (фиг, 1 в)Этот режим также поясняется припомощи схемы замещения коммутатора,.приведенной на фиг. 16, В момент времени 1 в анодной группе коммутаторавключен тиристор, связывающий нагрузку с фазой сети наинизшего потенциала (ЬС), а коммутируемые тиристоры катодных групп О 1 и Ч 2 переключаются на линию низкого потЕнциала,но так как этот момент приходитсяна интервал действия угла, то режим закорачивания нагрузки не образуется и в фазах нагрузки формируются 55импульсы напряжения под действием разности потенциалов фаз сети Сс и Ьс(на фиг. 2 зта разность отмечена 1 триховкой) . В момент времени 2 разностьпотенциалов обращается в нуль и схема Опереходит в режим закорачивания нагрузки (фиг, 1 в) .Величина и фаза нестационарной поуправления, а также от их частотныхсоотношений.Наличие нестационарной последовательности импульсов выходного напряжения, которое может регулироватьсяпри изменении угла, позволяет осуществлять плавный пуск асинхронногодвигателя беэ дополнительного усложнения схемы.Недостаток известного способа заключается в том, что наличие двухпоследовательностей импульсов, однаиз которых зависит от частотных соотношений входного и выходного напряжений, может быть причиной низкочастотных биений выходного напряжения и,как следствие, колебаний момента искорости двигателя. Даже при скачкообразном уменьшении угла упрежденияпри введении ШИР до минимальной величины, допустимой по условиям коммутации тока в преобразователях частотыс токоограничивающими реакторами навходе или при питании от источниковс соизмеримой с нагрузкой мощностью,величина угла упреждения оказываетсядостаточно большой (13 -20 ), чтопривоцит к биениям напряжения и момента, На частотах, кратных значениюГ = 1 и, где Г - частота, и - число фаэсети, амплитуды биений напряжения достигают 20 от номинальногозначения напрякения.Цель изобретения - подавление биений выходного напряжения, устранениеколебаний момента и скорости вращениядвигателя,Поставленная цель достигается тем,что при использовании известного способа длительность тактовых сигналовуправления ШИР изменяют по сигналукоррекции, величина которого определяется величиной напряжения нестационарной последовательности импульсовв паузах между тактовыми сигналамиуправления ШИР.Сигнал коррекции получают путемвыделения интервалов времени, соответствующих углам упре;кдения подачиуправляющих сигналов инверторного режима, и преобразования их в две сериипрямоугольных сигналов с последующиминтегрированием тех импульсов серии,которые прихЬдят в паузы между тактовыми сигналами ШИР.На фиг. 1 а представлена принципиальная схема вентильного коммутатора НПЧ; на фиг. 1 в и 16 - схемы замещения НПЧ для двух моментов времениего работы; на фиг. 2 и 3 - временныедиаграммы, поясняющие известный ипредлагаемый способы управления НПЧсоответственно; на фиг. 4 и 5 - принципиальная схема, реализующая предлагаемый способ управления НПЧ.Предлагаемый способ управления НПЧ,как и известный, обеспечивает формирование выходного, напряжения О, равного сумме напряжения стационарной по858200, следовательности Ош, и напряжениянестационарной последовательности23Величина напряжения О 2, в каждыйотдельный момент времени работы преобразователя определяется величинойугла упреждения и количеством импуль 5сов несгационарной последовательности,приходящихся на моменты пауз междутактовыми сигналами управления ШИР,которые, в свою очередь, определяют"ся фазовыми и частотными соотношениями мехду входным и выходным напряжениями,Для поддержания постоянства величины выходного напряжения О 7 при любых изменениях напряжения О измеряют величину этого напряжения, преобразуют его в сигнал коррекции и в зависимости от величины этого сигналаизменяют ширину тактовых сигналов управления ШИР, что приводит к соответствующему изменению составляющей напряжения О 2 Р, а следовательно, и кстабилизаций напряжения О 2 .Способ Формирования сигнала коррек"ции, поясняющийся временными диаграм- дмами на Фиг. 3, состоит в том, что изтрехфазного входного напряжения Овыделяют интервалы времени, соответствующие углу упреждения 5, и преобразуют их в две серии прямоугольныхимпульсов: для положительных Сс иотрицательных с 7 полуволн входйогонапряжения. С помощьюлогических преобразований сигналов Сс, С 7 исигналов управляющего генератора ГрГ выделяют те сигналы 0, и 0 соот 7 4 7ветственно для положительной и отрицательной полуволн напряжения О, ко"торые участвуют в формировании нестационарной последовательности импульсов выходного напряжения. После суммирования сигналов серийи Я 7 илогического преобразования с тактовымсигналом управления ШИР М выделяют се.рию сигналов 0, которые попадают в паузы между сигналами М, Иэ полученной 45серии сигналов ч выделяют постояннуюсоставляющую сигнала коррекции, которым воздействуют на ширину тактовогосигнала управления М,Наиболее близким по техническойсущности является преобразователь сблоком управления )5Однако такой преобразователь не может подавлять биения выходного напряжения.Непосредственный преобразовательчастоты для осуществления предлагаемого способа, содержащий группы уп"равляемых вентилей и блок управления,включающий управляющий генератор с мо.дулированной и немодулированной последдовательностью импульсов, который со"держит регулятор длительности тактовых импульсов ШИР, трансформаторныйиндикатор полярности напряжения сети,формирующий две системы трехфазных д напряжений сс взаимным Фазовым сдвигом, равным необходимому углу упреждения Р, последовательно с обмоткамикоторого включены первичные обмоткиимпульсных трансформаторов и диоды,образующие совместно с резисторамитрехимпульсные схемы выпрямления,снабжен шестью трехвходовыми логическими элементами ИЛИ, тремя двухвходовыми логическими элементами И, двумятриггерами,интегратором, инвертороми двухвходовым логическим элементомИЛИ, причем вторичные обмотки упомя"нутых импульсных трансформаторов сое"цинены с одними четырьмя трехвходовыми логическими элементами ИЛИ, выходыкоторых подсоединены ко входам двухсимметричных триггеров, нормальныевыходы которых связаны со входами двухдвухвходовых логических элементов И,вторые входы которых через два другихтрехвходовых логических элемента ИЛИсвязаны с немодулированными выходамиуправляющего генератора, их выходычерез двухвходовый логический элементИЛИ соединены с одним из входов третьего двухвходового логического эле"мента И, второй вход которого черезинвертор связан с выходом генераторатактовых сигналов управления ШИР, авыход через интегратор подключен квыходу регулятора длительности тактовых импульсов ШИР. Узел управления (фиг. 4) содержит трансформаторный индикатор 1 полярнос ти напряжения сети (ИПН) с двумя груп пами вторичных обмоток 2 и 3, образу-. ющих шестилучевую звезду, причем группа обмоток 3 соединена по схеме зигзаг. Последовательно с обмотками ИПН включены первичные обмотки маломощных импульсных трансформаторов 4" 15, вторые концы которых соединены с диодами 1 б, образующих с резисторами 28-31 четыре трехфазных выпрямителя с нулевыми выводами,Дополнительный узел состоит из четырех логических трехвходовых элементов ИЛИ 32-35, входы которых соединены с соответствующими выходами вторич ных маломощных импульсных трансформаторов 4-15 (фиг. 4 и 5), а выходы - с соответствующими входами двух симметричных триггеров Зб и 37. Нормальные выходы этих триггеров соединены с одним из входов двух двухвходовых логических элементов И 38 и 39, вторые входы которых соединены с выходами логических трехвходовых элементов ИЛИ 40 и 41, на входы котррых подают сигналыФ 1Гр, Г, Гс и. Г Г, с выхода управляющего гене ратора. Выходы ,логических элементов 38 и 39 через логический элемент ИЛИ 42 связаны с логическим элементом И 43, второй вход которого связан через инвертор 44 с задатчиком 45 тактовых модулирующих сигналов, а выход - со входоминтегратора 46, выход которого подсоединен к регулятору ШИР.При подключении ИПН к трехфазовой сети фиг, 3) с выходов вторичных обмоток импульсных трансформаторон 4- 15, соединенных в звезду, в моменты равенства фазных напряжений при переключении тока через диоды 16-27 снимаются узкие импульсы напряжения.Импульсы О , Ь , с (фиг. 4) соответствуют равенству положительных фазных напряжений сети, а импульсы Х, у, Л,отрицательных фазных напряжений, Аналогично импульсы 0 , Ъ сС и Х ус Хс соответствуют равенству положительных и отрицательных фазных напряжений, но а углом упреждения Д по отношению к 15 соответствующим сигналам а- е,С выходов трансформаторов сигналы поступают на входы логических элементов ИЛИ 32-35, которые выполняют роль сумматоров сигналов по сериям 20 О с Ь;с сО,Ьси Х,у, ; Х сус с 1 Х. С выхода логического элемента 32 серия сигналов О, Ь с С поступает на записывающий вход триггера 36, а серия сигналов Х с у,- на считыва ющий вход того же триггера, выполняющего роль формирователя серии прямоугольных сигналов отображения выделенных интервалон времени, соответствующих углам упреждения , Ана- ЗО логичную роль выполняет триггер 37, формирующий серию сигналов отображения СХ,у,Логические блоки И 38 и 39 перемножают серии сигналов С и Суу с со- З 5 ответствующими немодулипованными блоками сигналов управляющего генераторас с с с сГд с ГО с Гс с Гх с Гу с Гс с КотОРЫЕ На временной диаграмме фиг. 3 отмечены штриховкой, и формируют две серии сиг; налов 0 и 2, соответствующих стаци О онарной последовательности импульсон .положительной и отрицательной волны выходного напряжения. После сложения этих двух серий сигналов с помощью логического элемента ИЛИ 42 и перем ножением этой суммы с тактовым сигналом модулятора М 45, поступающим через инвертор 44 на вход элемента И 43, с выхода последнего снимается серия сигналон О.с соответствУющаЯ тем сиг О калам нестационарной последовательнос. ти, которые попадают в паузы между тактовыми сигналами управления ШИР.Интегратор 46, на вход которого поступает серия сигналов Ос выделяет среднее значение сигнала коррекции, поступающего на управляющие входы регуляторон ШИР.Испытания для сравнения известного и предлагаемых способа и устройства управления проводились на.маке О те непосредственного преобразователя частоты при частотном управлении асин. хронным и синхронным электропринодами мощностью до 75 кВА при питании как от гсромюаленной сети с токоограничи вающими Реакторами на нходе, так иот дизель-электрической станции мощностью 100 кВА, т. е, в условиях,при которых угол упреждения ) не может быть ниже 15-20 эл.град,При управлении преобразователем поизнестному способу на частотах, кратных 150 Гц, в выходном напряжении наблюдались биения напряжения с амплитудой до 30 от минимальной величины.Это вызвало насыщение машин, резкоевозрастание тока статора, колебаниямомента машин вплоть до их опрокидывания.Предлагаемым способом при соответ,ствующем подборе постоянной времениинтегрирующего устройства биения напряжения частотой выше 8 Гц подавляются полностью, а биения частотой8 Гц снижаются до 1-2. При этом достигается снижение тока статора, повышение устойчивости и равномерностиМода машин.Формула изобретения1. Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно- импульсным регулированием сШИР) выходного напряжения, формируемым н виде суммы стационарной последовательности импульсов, задаваемой тактовыми сигналами управления ШИР, и не- стационарной последовательности импульсон, обусловленной чередованием выпрямительного и инверторного режимов работы преобразователя с углами упреждения подачи управляющих сигналов в инверторном режиме, о т л и ч а ю щ и й с я тем, что, с целью подавления биений выходного напряжения, устранения колебаний момента и скорости вращения двигателя, длительность тактовых сигналов управления ШИР изменяют по сигналу коррекции, величина которого определяется значением напряжения нестационарной последовательности импульсов в паузах между тактовыми сигналами управления ШИР.2. Способ по и. 1, о т л и ч а ю щ и й с я бемс что сигнал коррекции получают путем ныделения интерва- . лов времени, соответствующих углам упреждения подачи управляющих сигналов инверторного режима преобразования их в две серии прямоугольных сигналон с последующим интегрированием тех импульсон серии, которые приходят н паузы между тактовыми сигналами ШИР.3. Непосредственный преобразователь частоты для регулируемого электрспринода, содержащий группы управляемых вентилей и блок упранления, который включает в себя управляющий генератор с модулированной и немодулированнои последовательностью импульсовс включающий в себя регулятор длительности тактовых импульсов ШИР, трансформаторный индикатор полярности напряжения сети, Формирующий две системы трехфазных напряжений со взаимным Фазовым сдвигом, равным необходимому углу упреждения Р , последовательно с обмотками которого включены первичные обмотки импульсных трансформаторов и диоды, образующие совместно с резисторами четыре трехимпульсные схемы выпрямления, о т л и ч а ю щ и й с я тем, что, с целью подавления биений выходного напряжения, устранения колебаний момента и скорости вращения двигателя, он снабжен шестью трехвходовыми логическими элементами ИЛИ, тремя двухвходовыми логическими 15 элементами И, двумя триггерами, интегратором и инвертором и двухвходовым логическим элементом ИЛИ, причем вторичные обмотки упомянутых импульсных трансформаторов соединены с о ни 20 ми четырьмя трехвходо ическими элементами ИЛИ, вьвсоды которых подсоединены ко в вход двух симметричных триггеров, нормальные выходы которых связаны со входами двух двухвходовых 75 логических элементов И, вторые входыкоторых через два других трехвходовыхлогических элемента ИЛИ связаны с немодулированными выходами управляюгФго генератора, их выходы в:з двухвходовый логические элемент ИЛИ Соединены с одиим из входов третьегодвухвходового логического элемента И,второй вход которого через инверторсвязан с выходом генератора тактовыхсигналов управления ШИР, а выход через интегратор подключен к выходу регулятора длительности тактовых импульсов ШИР.Источники информации, принятые во внимание при экспертизе1. Авторское свидетельство СССР 9 490238, кл. Н 02 Р 13/30,2. Авторское свидетельст Р 505119, кл. Р 13.МВ 971,3 рское свидетеляство ссгр 9 530411, кл. Н 02 г 13/06, 1971.4, Авторское свидетельство СССР по заявке Р 2509577/24-07, 21.07.775. АвторскЬе свидетельство СССР9 221146, кл. Н 02 М 7/515, 1968.Тираж 730 ВНИИПИ Государственно по делам изобретени113035, Москва, Ж, Р иал ППП "Патент, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
2685398, 13.11.1978
НОВОСИБИРСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ СВЯЗИ ИМ. Н. Д. ТУРЦЕВА
КОЗЛЯЕВ ЮРИЙ ДМИТРИЕВИЧ, ЗАГОРСКИЙ ВИКТОР ТЕОДОРОВИЧ, АГАФОНОВ МИХАИЛ ПАВЛОВИЧ
МПК / Метки
МПК: H02P 13/16
Метки: выходного, непосредственный, непосредственным, преобразователем, регулир, регулированием, регулируемого, частоты, шир, широтно-импульсным, электропривода
Опубликовано: 23.08.1981
Код ссылки
<a href="https://patents.su/9-858200-sposob-upravleniya-neposredstvennym-preobrazovatelem-chastoty-dlya-reguliruemogo-ehlektroprivoda-s-shirotno-impulsnym-regulirovaniem-shir-vykhodnogo-napryazheniya-i-neposredstvenny.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно-импульсным регулированием (шир) выходного напряжения и непосредственный преобразователь частоты для регулир</a>
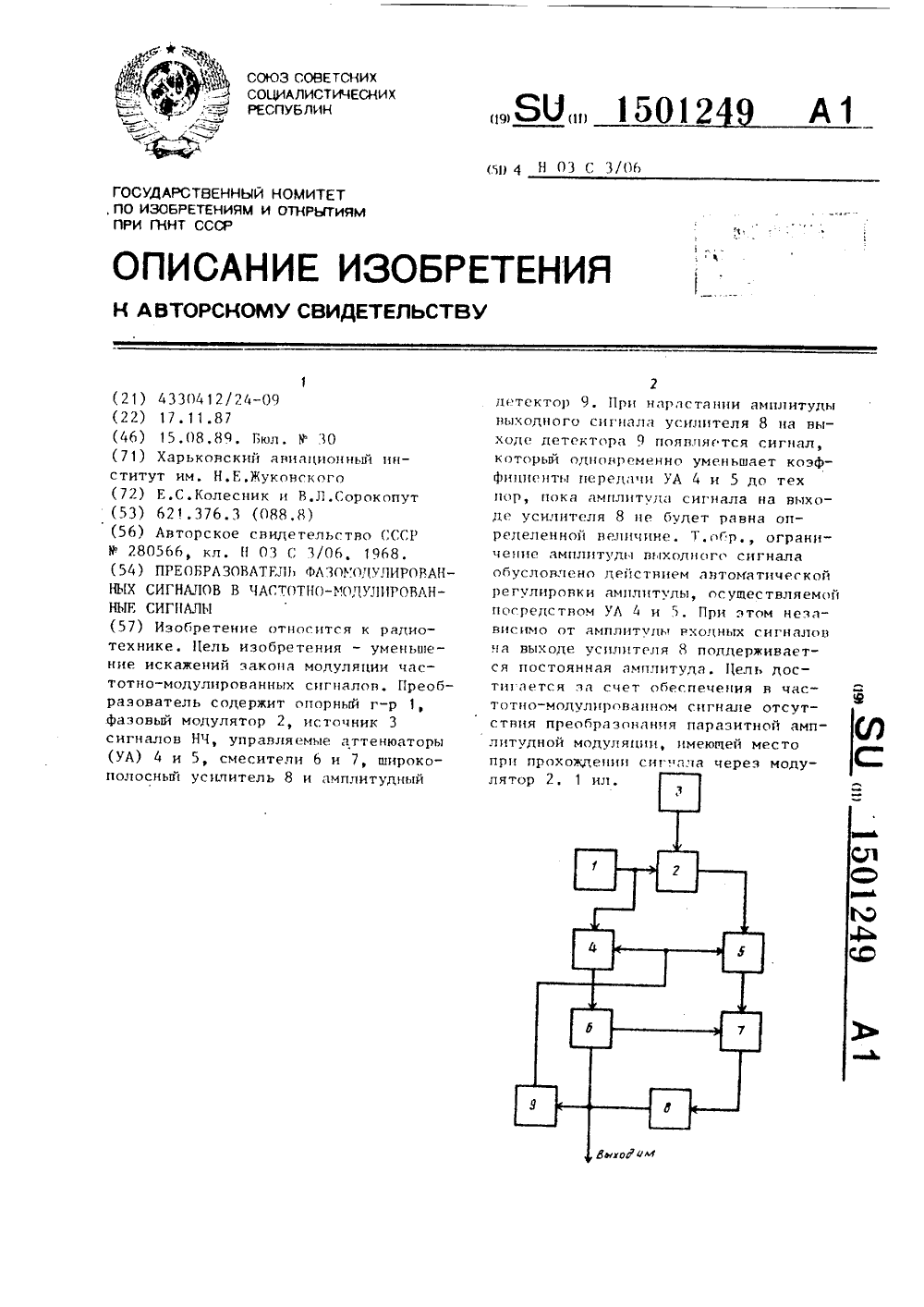
Преобразователь фазомодулированных сигналов в частотно модулированные сигналы
Номер патента: 1501249
Опубликовано: 15.08.1989
МПК: H03C 3/06
Метки: модулированные, сигналов, сигналы, фазомодулированных, частотно
...сигнала, поступающие на второй вход смесителя 6. После пребразвация в смесителях 6 и 7 эти флуктуации поступают на вход широкополосного усилителя Й.Таким образом, широкополосный усилитель 8 оказьнается охваченным це пью обратной связи, входом которой является вторй вход смесителя 6, а выходом - выход смесителя 7, Эта цепь обратной связи является четырехт- люсником братнси гнязи (ЧОС), 11 р 55 выполнении ус пццй ба 1 анса фаз ц амплитуд ц авго батеп цой сигтсме, образоваци и епццеццыми в кол ц,ипрон цпи ьм у цпцттп и 8 и 1 РС, цэцкают .иебацця с чагттой Г аавци й т раапсти фаз колебаний, п.тупанщих ца входы смесителей Ь и 7, Иа выходе смегитсля 6 вьде.нетс я ги цап с частотойгде Г- чагтота сигнала ца выходеаттецюаторов 4 и 5,Г -...
Устройство формирования временной последовательности импульсов

Номер патента: 430372
Опубликовано: 30.05.1974
Авторы: Мельников, Павлов, Трифонов
МПК: G06F 1/04
Метки: временной, импульсов, последовательности, формирования
...И 8 периписи, дополнительный триггер 4, дополнительные.схемы И 5, 6, 7, На вход 8 поступают входные сигналы, а с выхода 9 снимается импульсная последовательность,Устройство работает следующим образом.Предварительно первый счетчик 1 устанавливается в нулевое состояние, а все разряды взорого счетчика 2 - в единичное, при этом сигналом с выхода первой дополнительной схемы И 6 дополнительный триггер 4 устапавлцьается в О, а в счетчик 1 заносится единица. Триггер 4 закрывает третью дополнительную схему И 6 и открывает вторую схему И 7. На вход 8 подаются импульсы с1частотой 1 о =lоИмпульс с входа 8 через схему И 7 проходит на выход 9 и одновременно устанавливает триггер 4 в 1 и переписывает обратньш код единицы из счетчика 1 в счетчик 2, прц...
Устройство для формирования псевдослучайной временной последовательности импульсов

Номер патента: 917316
Опубликовано: 30.03.1982
МПК: H03K 3/84
Метки: временной, импульсов, последовательности, псевдослучайной, формирования
...и 1 З ключ, выход которого подключен к второму входу регистра сдвига с сумматором в цепи обратной связи, разрядные выходы которого подключенц к первь 1 м входам блока элементов И, вто;рые входы которого объединены и подключены к первому выходу элемента задержки,вход которого соединен с выходом второго дешифратора и первым входом триггера, второй вход триггера соединен с вторым выходом элемента за" держки, а первый и второй вцходы триггера подключены соответственно к первым входам первого и второго элементов И, вторь 1 е входы которых зо объединены и соединены с выходом генератора импульсов, выходы первого и второго элементов И подключены соответственно к управляющим входам ключа и счетчика импульсов.На чертеже представлена...
Устройство для формирования псевдослучайной временной последовательности импульсов

Номер патента: 991586
Опубликовано: 23.01.1983
МПК: H03K 3/84
Метки: временной, импульсов, последовательности, псевдослучайной, формирования
...последовательно соединенные задатчик последовательности ие пульсов и блок ключей, который,включен между разрядными выходами регистра сдвига и первыми входами блока 1 о элементов И.На чергеже представлена функциональная схема устройства для формирования псевдослучайной временной последовательности импульсов, 15Устройство содержит генератор 1, дешифраторы 2 и 3, регистр 4 сдвига с сумматором 5 в цепи обратной связи, блок 6 элементов И,.элементы И 7, 8, триггер 9, счетчик 10 импульсов, эле мент 11 задержки, ключ 12, блок 13 ,установки режимов, задатчик 14 последовательности импульсов, блок 15 клю. чей 16, формирователь 17 импульсов. Устройство работает следующим образом.В исходном состоянии триггер 9находится в состоянии, когда...
Аппаратура акустического каротажа

Номер патента: 364913
Опубликовано: 01.01.1973
МПК: G01V 1/52
Метки: акустического, аппаратура, каротажа
...работы преобразователя сигналов.Предлагаемая аппаратура включает в себя скважинный прибор 1, содержащий акустические излучатели И и приемник П, кабель 2, соединяющий скважинный прибор с наземной аппаратурой, содержащей разделительный фильтр 3, блок синхронизации 4, блок развертки 5, электроннолучевую трубку б, блок марок времени 7, преобразователь сигналов, состоящий из входного усилителя 8, двухполупериодного выпрямителя 9, детектора 10, дифференцирующего усилителя П и усилителя- формирователя 12, а также оконечный формирователь 13, фоторегистратор с проекционным устройством 14 и блок-баланс 15.Аппаратура работает следующим образом.Сигналы от скважинного прибора 1 поступают по кабелю 2 на фильтр 3, с выхода фильтра сигналы проходят на...
Предыдущий патент: Нагрузочное устройство для испытания генераторов электростанций
Следующий патент: Адаптивное устройство для управления вентильным преобразователем
Случайный патент: Тиски