Электромагнитный привод ударного действия
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1352607
Авторы: Башкиров, Джансугуров, Жихорь, Калашников, Козлов, Ляшков









Текст
(59 4 Н 02 Р 7/62 ИСАНИЕ ИЗОБРЕТЕНИЯ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(71) Институт горного дела АН КазССР(56) Авторское свидетельство СССРУ 1053256, кл, Н 02 Р 7/62, 1983.Авторское свидетельство СССРУ 1179512, кл. Н 01 Р 7/62, 1985.(54) ЭЛЕКТРОМАГНИТНИЙ ПРИВОД УДАРНОГО ДЕЙСТВИЯ(57) Изобретение относится к электротехнике и может быть использованопри разработке электромагнитныхмашин ударного действия, Цель состоитв расширении диапазона регулирования частоты и энергии ударов и упрощении привода, Регулирование энергии и частоты ударов осуществляется изменением напряжения на шинах управляемого вентиля, что возможно в достаточно широких пределах, и дополнительной схемой, позволяющей отключить часть обмоток. Упрощение достигнуто за счет устранения элементов задержки в каждом канале управления, Изменение числа работающих обмо ток позволяет провести более точные исследования машин со свободным вы бегом бойка, ЭФФективный режим работы автоматически поддерживается и при изменении различных параметров аФ таких как нагрев обмоток и длительность переходного процесса в электромагнитах при коммутации в них токаС:52607 50 55 113Изобретение относится к управлению электрическими машинами и можетбыть использовано при разработкеэлектромагнитных молотов большоймощности.1 ель изобретения - расширение диапазона регулирования частоты и энергии ударов и упрощение привода,На Фиг. 1 схематично показанэлектромагнитный делитель; на фиг.2 то же, продольный разрезна Фиг.Зфункциональная схема электромагнитлного привода ударного действия; нафиг. 4 - разрез А-А на фиг, 1 (продольный разрез датчика контакта бойка с хвостовиком инструмента); нафиг5 - разрез Б-Б на фиг. 1 (поперечный разрез датчика фиксации соприкосновения бойка с хвостовикоминструмента)Электромагнитный привод ударногодействия включает электромагнитныйдвигатель; и устройство управленияэтим двигателем,Электромагнитный двигатель содержит (фиг. 1 и 2) и силовых обмоток 1, каждая из которых имеет одну и ту же длину 3. и заключена в магнитопровод, состоящий иэ цилиндрического ярма 2,закрытого с торцов полюсами, выполненными в форме фланцев 3 толщиной К. Обмотка 1, заключенная в магнитопровод, представляет собой цилиндрический электромагнит длиной 3. =3 +2 К.Обмотки 1 (электромагниты) установлены на вертикальной немагнитной направляющей 4 с постоянным шагом Ь. Внутри направляющей 4 орасположен ферромагнитный боек 5, отношение длины Ь которого к шагу й обмоток 1 больше единицы, но меньше двух,т.е. боек 5 имеет длину, большую шага обмоток 1, но меньшую двух шагов. Боек 5 нижним торцом контактирует с ферромагнитным хвостовиком 6 инструмента 7, при этом верхний торец бойка 5 расположен внутри второй снизу обмотки 1. Между этим торцом бойка 5 и верхним торцом второй снизу обмотки 1, т.е. концом этой обмотки, образован рабочий зазор, величина которого может изменяться в пределах от минимальногодо максимального Узначений, определяемыхмакссоответственно начальным А и конечным Б наинизшим положениями бойка 5, те. определяемых максимальнымизменением хода д бойка 5.Максимальное изменение хода бак,бойка зависит от назначения электромагнитного привода ударного действия и задается при его конструировании. Предлагаемый электромагнитный привод ударного действияпосле установки его на податчике(не показан) можно использовать дляотбойки крепких горных пород (руды),в этом случае Й,к, задается порядка50 мм, а при использовании этого привода в качестве электромагнитногосейсмоисточника с предварительнымподжатием излучающей плиты Й а задается порядка 30 мм.При нахождении бойка 5 в конечном положении Б его верхний торец,расположенный внутри второй снизуобмотки 1, находится от нижнего торца этой обмотки на расстоянии 3.,называемом глубиной предварительного внедрения бойка в обмотку (3.минимальная глубина предварительного внедрения бойка 5 во вторую снизу обмотку 1, при которой боек 5 ещевтягивается в эту обмотку при пропускании по ней тока.При нахождении бойка 5 в начальном положении А глубина его предварительного внедрения в эту же обмотку 1 равна 3. +б а, Для электромагнитных молотов 3 =(0,25-0,4)3, Оптимальным является включение обмотки именно в момент, когда предварительное внедрение бойка в обмоткукак при рабочем, так и при холостомходе равно 0,25 3 Это.условие впредлагаемом приводе не выполняетсятолько при включении второй снизукатушки во время холостого хода, таккак в это время положение бойка задано положением инструмента,10 15 20 25 30 35 40 45 Кроме того, электромагнитный двигатель содержит нижний и (п+1) основных трансформаторных датчиков положения бойка 5, один из которых установлен ниже, а другой - выше всех обмоток 1 и которые являются соответственно нижним 8 и верхним 9 концевыми датчиками. Один датчик установлен выше верхнего концевого датчика 9 и является вспомогательным датчиком 10, остальные (и) датчиков установлены между обмотками 1 и являются промежуточными датчиками 11. Расстояние между соседними дат: 13 чиками 11, а также расстояние между (и)-м (верхним) датчиком 11 и датчиком 9 и расстояние между датчиками 9 и 10 равны шагу Ь обмоток. В электромагнитный двигатель введены также (и+1) .дополнительных трансформаторных датчиков положения бойка 5, из которых два, например датчики 12 и 13, являются дополнительными соответственно верхним концевым и вспомогательным датчиками и установлены на расстоянии 1", вьше соответственно датчиков 9 и 10, остальные (и) датчиков, например дополнительные промежуточные датчики 14, установлены между обмотками 1, т.е. между обмотками 1 двигателя на расстоянии, равном максимальному рабочему зазору 1, от каждого промежуточного датчика 11 установлен дополнительный промежуточный датчик 14, при этом расстояние между соседними датчиками 14 равно шагу Ь обмоток 1, Нижний концевой датчик 8 установлен от нижнего (первого) дополнительно ". - го промежуточного датчика 14 на расстоянии, равно шагу Ь обмоток 1.На направляющей 4 ниже датчика 8 установлен датчик 15 контакта бойка 5 с хвостовиком 6.Датчик 15 содержит (фиг 4 и 5) ферромагнитный полый цилиндр .16 и две идентичные системы съемных полюсов 17, каждая из которых содержит по четыре указанных полюса 17, расположенных в одной плоскости под прямым углом друг к другу, Расстояние между плоскостями, в которых расположены пблюса 17 первой и второй систем, выбрано несколько большим максимального изменения хода й бойка 5 (фиг, 2 и 4). Таким образом, полюса 17 первой системы расположены в зоне движения бойка 5, а полюса 17 второй системы - в зоне хвостовика 6. На фиг. 4 показано промежуточное между А и Б положение бойка 5. На полюсах 17 первой системы установлены обмотки 18 возбуждения, а на полюсах 17 второй системы - выходные обмотки 19. Обмотки 18 возбуждения подключены к источнику переменного напряжения, а выходные обмотки 19 соединены между собой последовательно так, что их сигналы суммируются. С выходных обмоток 19 снимается сигнал только при контакте бойка 5 с хвостовиком 6. Датчики 11 и 14, расположенныемежду одними и теми же обмотками 1,образуют пару датчиков. Первая парадатчиков 1 и 14 расположена междупервой снизу и второй обмотками 1,вторая - между второй и третьей обмотками 1, третья - между третьей ичетвертой обмотками 1 и т.д. (и)-я1 О пара датчиков 11 и 14 расположенамежду (и)-й и и-й обмотками 1.Образовавшиеся пары промежуточных датчиков размещены симметричноотносительно обмоток 1.15 Датчики 9, 12 и 10, 13 образуютсоответственно и-ю и (п+1)-ю парыдатчиков, Датчик 11 (и)-й пары идатчик 12, а также датчик 14 (и)-йпары и датчик 9 расположены симметрично относительной и-й обмотки 1.Датчик 8 и датчик 11 первой парырасположены симметрично относительно первой обмотки 1,Расстояние от нижнего торца бойка25 5 (при нахождении последнего в положении Б) до датчика 8 равно Р ,а до датчика 11 первой пары датчиковравно шагу Ь обмоток 1.Установленные на направляющей 430 датчики 8-14 идентичны и представляют собой датчики трансформаторноготипа с разомкнутым магнитопроводом,которые выдают сигналы при замыканииих магнитопровода Ферромагнитнымбойком 5. Выхсдной сигнал любого изукаэанных датчиков по длительностиравен времени прохождения бойка мимоэтого датчика.К обмоткам 1 подключено устройство управления, содержащее (фиг. 3)40многоканальный состоящий из и каналовкоммутатор, а также (2 п) первых20 и (2 п) вторых 21 двухвходовыхэлементов И, (и+1) элементов НЕ 22,(и+2) дополнительных элементов НЕ 23,45 (и+2) Формирователей 24 коротких им.пульсов и (и+2) дополнительных Формирователей 25 коротких импульсов.Каждый канал коммутатора соединен с шинами управляемого выпрямителя (не показан) и содержит последовательно соединенный с обмоткой 1 силовой ключ 26 с входами отпирания и запирания. Обмотки 1 зашунтированы разрядными цепями 27, необходимыми для гашения энергии магнитного поля после отключения обмоток 1 от управляемого выпрямителя.Датчик 15 контакта через дополнительный формирователь 25 связан свходом отпирания ключа 26 второго канала, первый промежуточный датчик511 через элемент НЕ 22 и формировафтель 24 связан с входом отпиранияключа 26 третьего канала, каждый из2,3,(п),(п) промежуточныхдатчиков 11 через элемент НЕ 22 иформирователь 24 связан с вторымивходами своих элементов И 20 и 21,первые входы которых связаны соответственно с 1 и 3, 2 и 4(п) и(п), (и) и (и) промежуточнымидатчиками 11, а выходы - соответственно с,входами запирания всех ключей 26 и входами отпирания ключей26 соответственно 4,5,(п),пканалов. (п)-й промежуточный канал2011, концевой 9 и вспомогательный 10датчики через свои элементы НЕ 22и формирователи 24 связаны с вторыми входами своих элементов И 20,первые входы которых связаны соответственно с (п)-м, (и)-м промежуточными 1 и концевым 9 датчиками,а выходы - с входами запирания всехключей 26.Концевой датчик 8 через дополнительный элемент НЕ 23 и формирователь 24, а первый дополнительный промежуточный датчик 14 через дополнительные элемент НЕ 23 и формирователь 25 связаны с входами запираниявсех ключей 26, каждый из 2,3, 35(н-З), (и) дополнительных промежуточных датчиков 14 через дополнительные элемент НЕ 23 и формирователь 25связан с вторыми входами своих элементов И 20 и 21, первые входы которых связаны соответственно с 3 и 1,4 и 2(п) и (п), (и) и(и) дополнительными промежуточнымидатчиками 14, а выходы - соответственно с входами запирания всех ключей 4526 и входами отпирания ключей 26 соответственно 1,2(п), (и)каналов. Дополнительные (п)-й промежуточный 14, концевой 12 и вспомогательный 13 датчики через свои дополнительные элементы НЕ 23 и формирователи 25 связаны с вторыми входамисвоих элементов И 21, первые входыкоторых связаны с дополнительнымисоответственно (п)-м, (п)-м промежуточными 14 и концевым 12 датчиками, а выходы - с входами отпиранияключей 26 соответственно (п)-го,(п)-го,п-Ро канало,Все формирователи 24 и 25 идентичны и предназначены для создания импульсов малой длительности по сравнению с длительностью импульсов любогоиз указанных выше датчиков.Для пуска устройства служит выключатель 28, установленный в цепь питания Ц, обмоток 18 возбуждения.Электромагнитный привод ударногодействия работает следующим образом.Пусть, например, в исходном состоянии устройства боек 5 занимаетначальное положение А (фиг, 2), Приэтом он находится под полюсами 17датчика 15,на которых установлены обмотки 18 возбуждения,а контактирующий с нимхвостовик 6 находится под полюсами 17,на которых установлены выходные обмотки 19 (фиг, 4), Находясь в положении А, боек 5 одновременно замыкает магнитопроводы датчика 8 и датчиков 11 и 14 первой пары. После замыкания выключателем 28 цепи питанияобмоток 18 возбуждения с выходных обмоток 19, т,е, с датчика 15,снимается сигнал, который через связанный с ним формирователь 25 поступает на вход отпирания ключа 26 второго канала и отпирает его.,По обмот.ке 1 второго канала начинает протекать ток и боек 5 втягивается этойобмоткой.По мере втягивания боек 5 проходит расстояние Гмин (фиг. 2), равноев данном случае длине рабочего зазора:второй снизу обмотки 1, и достигает конца этой обмотки. В этот момент происходит размыкание магнитопровода датчика 8.В момент размыкания магнитопровода датчика 8 через связанные с нимэлемент НЕ 23 и формирователь 24 навход запирания всех ключей 26 поступает сигнал, Ключ 26 второго канала запирается и обмотка 1 отключа-.ется. При этом энергия магнитногополя, созданного током обмотки 1,рассеивается в разрядной цепи 27 своего канала, а боек 5 продолжает дви-гаться по инерции. Расстояние энергии магнитного поля в других обмотках 1 производится аналогично,Двигаясь по инерции, боек 5 своей передней частью последовательно замыкает магнитопроводы датчиков 11 и 14 второй пары датчиков, а затем своей задней частью размыкает магнитопровод датчика 11 первой пары дат1352607 чиков. В это время боек 5 внедрился в обмотку 1 третьего канала на глубину 1 и расстояние между передним торцом бойка 5 и концом этой обмотки стало равным Р (положение бойка 5максотносительно обмотки 1 третьего канала в момент размыкания магнитопровода датчика 11 первой пары датчиков (на фиг. 2 показано пунктиром).В момент размыкания магнитопровода датчика 11 первой пары датчиков через связанные с ним элемент НЕ 23 и формирователь 24 на вход отпирания ключа 26 третьего канала поступает сигнал. Ключ 26 отпирается, по обмотке 1 третьего канала начинает протекать ток и боек 5 втягивается этой обмоткой.По мере втягивания боек 5 проходит расстояние Ра и достигает конца этой обмотки. В этот момент происходит размыкание магнитопровода датчика 14 этой же пары датчиков.В момент размыкания магнитопровода указанного датчика 14 через связанные с ним элемент НЕ 23 и формирователь 25 на вход запирания всех ключей 26- поступает сигнал. Ключ 26 третьего канала запирается, обмотки 1 отключаются, а боек 5 продолжает двигаться по инерции,Затем боек 5 передней частью последовательно замыкает магнитопроводы датчиков 11 и 14 третьей пары датчиков, а затем задней частью размыкает магнитопровод датчика 11 второй пары датчиков, В это время боек 5 внедрился в обмотку 1 четвертого канала на глубину Х, и расстояние между передним торцом бойка 5 и концом этой обмотки стало равным Укс. В момент размыкания магнитопровода датчика 11 второй пары датчиковчерез связанные с ним элемент НЕ 22,формирователь 24 и открытый элементИ 21 на вход отпирания ключа 26четвертого канала поступает сигнал.Ключ 26 отпирается, по обмотке 1четвертого канала начинает протекатьток. При протекании тока по обмотке1 четвертого канала боек 5 втягивается этой обмоткой,1Продолжая свое движение, боек 5 в 45 конце рабочего хода наносит удар по.инструменту 7, снова замыкает магни-:топровод датчика 15 контакта и описанный цикл работы электромагнитного привода ударного действия повто О Ряется.Регулирование энергии и частотыударов в предлагаемом приводе осуществляется эа счет изменения напряжения на шинах управляемого выпрями-теля, что возможно в достаточношироких пределах. Схема устройствапозволяет отключить часть обмоток,то снижает энергию и частоту ударов.Упрощение привода достигается за Двигаясь по инерции, боек 5 передней частью последовательно замыкает магнитопроводы датчиков 11 и 14 следующей пары датчиков и описанные выше процессы повторяются. Продолжая свое движение вверх какпод действием электромагнитных сил,действующих последовательно со сто 5роны оставшихся обмоток 1, так и поинерции в промежутках отсутствия указанных сил, боек 5 в определенныймомент времени достигает своего крайнего верхнего положения и останав 0 ливается, заканчивая обратный (холостой) ход. Это положение бойка нафиг. 2 обозначено через В. Затем zоддействием силы тяжести боек 5 начинает движение в обратную сторону, совершая прямой рабочий ход, и в определенный момент времени задней частью размыкает магнитопровод датчика 13. В это время боек 5. внедрилсяв обмотку 1 п-го канала на глубину1 и расстояние между передним торцом бойка 5 и концом этой обмоткистало равным РВ момент размыкания магнитопровода датчика 13 через связанные с ним25 элемент НЕ 23 формирователь 25 и открытый элемент И 21, на вход отпирания ключа 26 п-го канала поступаетсигнал. Ключ 26 отпирается, по обмотке 1 п-го канала начинает протекать ток и боек втягивается этойобмоткой.По мере втягивания боек 5 проходит расстояние Рак и достигает конца этой обмотки. В этот момент происходит размыкание магнитопроводаЗ 5 датчика 10 через связанные с нимэлемент НЕ 22, формирователь 24 иоткрытый элемент И 20, на вход запирания всех ключей 26 поступает сигнал. Ключ 26 ц -го канала запирается,обмотка 1 отключается, а боек продолжает двигаться вниз по инерции и поддействием силы тяжести,1352607 10 15 20 25 30 35 40 50 счет устранения элементов задержкив каждом канале управления. Изменениечисла работающих обмоток позволяетпровести более точные исследованиямашин простого действия, со свободным выбегом бойка, двойного действияи многокаскадных машин,В предлагаемом электромагнитномприводе эффективный режим работыавтоматически поддерживается и приизменении различных его параметров(нагрев обмоток, длительность переходных процессов в электромагнитахпри коммутации в них тока, угол наклона двигателя, скорость бойка),при регулировании энергии и частотыударов, расширений диапазона регулирования этих параметров. Формула изобретения Электромагнитный привод ударного действия, включающий электромагнитный двигатель, содержащий и обмоток, установленных с постоянным шагом на вертикальной немагнитной направляющей, внутри которой расположен ферромагнитный боек, отношение длины которого к шагу обмоток больше единицы, но меньше двух, и который нижним торцом контактирует с ферромагнитным хвостовиком инструмента, при этом верхний торец бойка расположен внутри второй снизу обмотки, нижний и и+1 основных датчиков положения, расположенных на указанной направляющей с шагом, равным шагу обмоток, при этом нижний датчик расположен ниже нижней обмотки, и блок управления, содержащий управляемый выпрямитель и соединенный с его выводами и-канальный коммутатор обмоток, каж-. дый канал которого содержит соединенный последовательно с обмоткой силовой ключ с входами отпирания и запирания, при этом первый канал, подключенный к нижней обмотке, включает в себя также два формирователя коротких импульсов, элемент НЕ, каждый х-й канал, где 2.(п), включает в себя также формирователь коротких импульсов, элемент НЕ и.четыре элемента 2 И, (п)-й канал включает в себя также формирователь коротких импульсов, элемент НЕ и два элемента 2 И, а и-й канал, подключенный к верхней обмотке, включает в се" бя также два формирователя коротких импульсов, два элемента НЕ и два элемента 2 И элемент НЕ каждого -гоканала связан входом с соответствующим датчиком положения, а выходом через формирователь коротких импульсов - с одними входами двух элементов 2 И, другие входы которых связаны соответственно с датчиками (-1)-го и (+1)-го каналов, выход одного из элементов 2 И соединен с входом отпирания ключа (+2)-го ка-, нала, элемент НЕ первого канала соединен входом с соответствующим основным датчиком, а выходом через формирователь коротких импульсов - свходом отпирания ключа третьего канала, три верхних датчика через элементы НЕ и формирователи короткихимпульсов подключены к однимвходамэлементов 2 И, другие входы которыхсоединены соответственно с (п)-м,(и)-м, и-м основными датчиками положения, о т л и ч а ю щ и й с я тем, что, с целью расширения диапазона регулирования частоты и энергииударов и упрощения привода путем устранения элементов задержки, в негодополнительно введены датчик контакта бойка с хвостовиком инструмента, п+1 дополнительных датчиков положения, каждый из которых образуетс соответствующим основным датчикомположения симметричную относительнососедних обмоток пару и установленвьппе него на расстоянии, равном максимальному расстоянию между верхними торцами второй снизу обмотки ибойка при наинизшем положении последнего, нижний датчик положения установлен на том же расстоянии от нижнего торца бойка при наинизшем положении последнего, в первый канал управления введены дополнительно дваформирователя коротких импульсов идва элемента НЕ в каждый -й канал - формирователь коротких импульсов и элемент НЕ, в (и - 1)-й канал -формирователькоротких импульсов иэлемент НЕ, в и-й канал - два элемента НЕ, два формирователя коротких импульсов и два элемента 2 И, при этомвходы запирания ключей всех каналовсоединены и подключены к выходамвторых и третьих элементов 2 И -хканалОв, через последовательно сое 55 диненные элементы НЕ и формирователи коротких импульсов - к нижнему ипервому дополнительному датчикам,выходу первого элемента 2 И (и)-го канала и выходам первого и второго11 1 элементов 2 И и-го канала, связанных входами с и-м и (и+1)-м" основными датчиками, датчик контакта бойка с хвостовиком инструмента через формирователь коротких импульсов подключен к входу отпирания ключа второго канала, выход четвертого элемента 2 И х-го канала соединен с входом отпирания ключа (-1)-го канала, один вход соединен с дополнительным датчикцм положения (-1)-го канала, другой вход, - с одним входом третьего элемента 2 И и через последовательно соединенные элемент НЕ и формирователь коротких импульсов - с дополнительным датчиком положения, соединенным с другим входом третьего элемента 2 И (-1)-го канала и другим входом четвертого элемента 3526071 г2 И (х+1)-го канала, (и-)-й. дополнительный датчик положения соединен свторыми входами третьих элементов52 И (и)-го и п-го каналов и черезпоследовательно соединенные элементНЕ и формирователь коротких импульсов с входом второго элемента 2 И,л-й и (и+1)-й дополнительные датчикиположения через последовательно соединенные элементы НЕ и формирователикоротких импульсов подключены к одним входам соответственно третьегои четвертого элементов 2 И и-го канала, дРугие входы которых подключенык (и)-му и п-му дополнительнымдатчикам положения, а выходы - квходам отпирания ключей соответственно (и в ) - го и а - го кана .лов.1352607 77 Составитель В,АлфимовТехред М.Ходанич Корректор А.Тяско Редактор А.Лежнина Заказ 5573/54 Тираж 659 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
4041610, 24.03.1986
ИНСТИТУТ ГОРНОГО ДЕЛА АН КАЗССР
ЛЯШКОВ ВЛАДИМИР ИВАНОВИЧ, ДЖАНСУГУРОВ САЯТ ИЛЬЯСОВИЧ, КОЗЛОВ АЛЕКСАНДР АЛЕКСЕЕВИЧ, КАЛАШНИКОВ АЛЕКСАНДР АНДРЕЕВИЧ, БАШКИРОВ НИКОЛАЙ АЛЕКСАНДРОВИЧ, ЖИХОРЬ ЕВГЕНИЙ АБРАМОВИЧ
МПК / Метки
МПК: H02P 7/62
Метки: действия, привод, ударного, электромагнитный
Опубликовано: 15.11.1987
Код ссылки
<a href="https://patents.su/9-1352607-ehlektromagnitnyjj-privod-udarnogo-dejjstviya.html" target="_blank" rel="follow" title="База патентов СССР">Электромагнитный привод ударного действия</a>
Способ изготовления обмоток индуктивных фазовых датчиков линейных перемещений

Номер патента: 639035
Опубликовано: 25.12.1978
Автор: Перельштейн
МПК: H01F 41/06
Метки: датчиков, индуктивных, линейных, обмоток, перемещений, фазовых
...связующего плоскости обмоток обрабатывают,Способ изготовлении обмоток индуктивных фазовых датчиков осуществляютследующим образом,Ленточный проводник калибруют потолщине, покрывают калиброванным потолщине ьчектроизоляционным материалом ц составляют рулонный пакет (изоляция, проводник, изоляция), который принормальной температуре раскладываютпо зигзагообразной схеме, Затем заготовку предварительно спрессовывают639035 25 Составитель В. ПеревозовскийРедактор Е, Кравцова Техред М, Борисова Корректор А, Гриценко Заказ 7291/41 Тираж 918 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская набд, 4/5Филиал Г 1 ПП Патент, г, Ужгород, ул. Проектная, 4 усилием,...
Датчик контроля положения движущихсяобектов

Номер патента: 806512
Опубликовано: 23.02.1981
Авторы: Ковалев, Королев, Ничик, Новиков, Панин, Якунин
МПК: B61L 1/16
Метки: датчик, движущихсяобъектов, положения
...10 им пульсов на выходе эммитерного повторителя 17 преобразуется в короткие импульсы, длительностью 10-15мкс, которые формируются в моментвремени 1 э, Этот импульс запускаетуправляемый тиристорный одновибратор 9 (накопительный конденсаторзаряжен во время предыдущей погуволны напряжения питания). На выходеимпульсного трансформатора 4 появляется мощный импульс, который идет 2 О на запуск генератора б импульсови в цепь синхронизации приемника 1. Напряжение на конденсаторе генератора б импульсов в этот момент р 5 равно О (точка А 1 ф кривой 19Фиг.2). Поэтому в передающей антенне в момент времени С Формируетсяимпульс тока, величина .которого соответствует напряжению Ос.При увеличении напряжения питания (кривые с индексом 20 на...
Датчик фазы
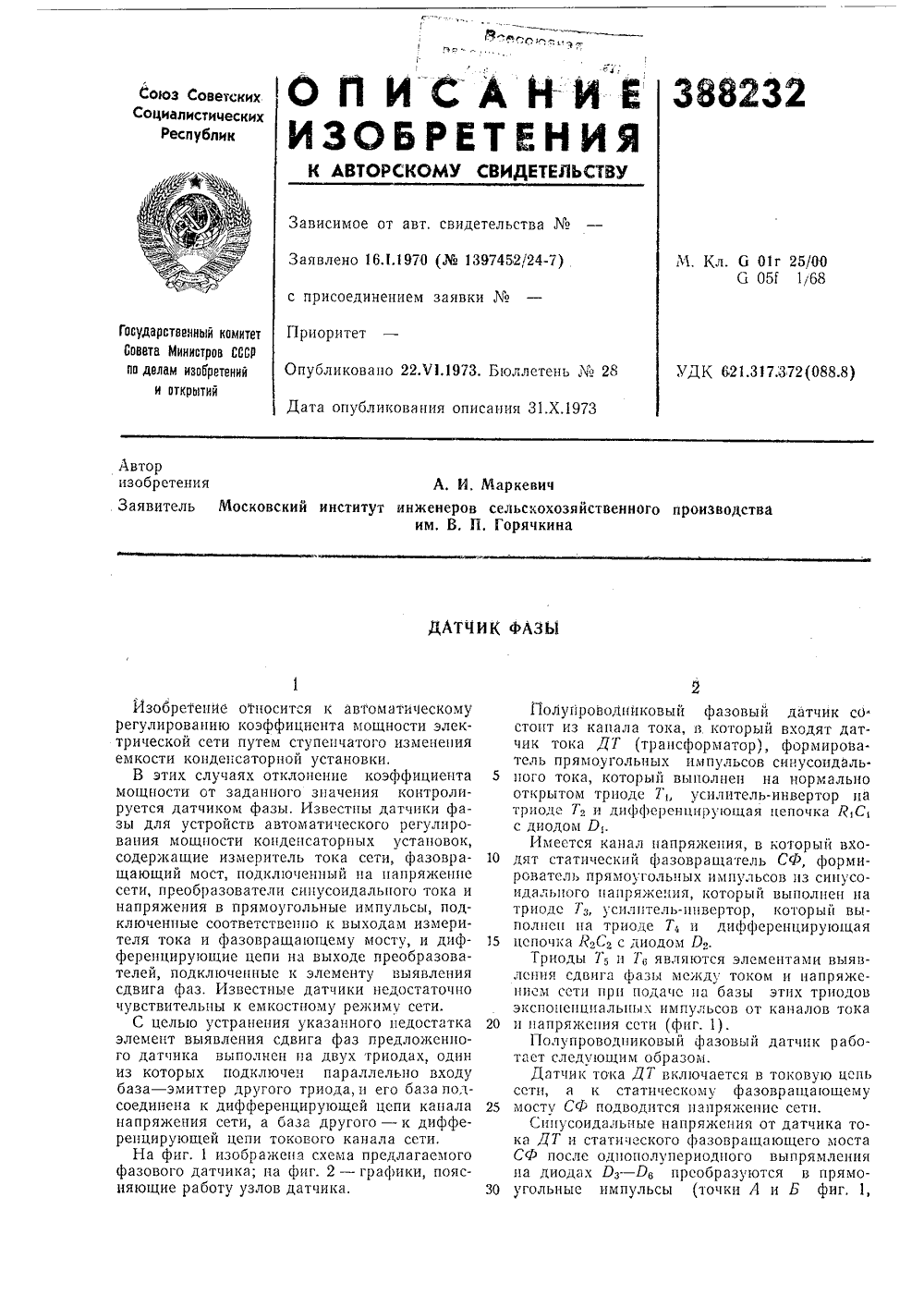
Номер патента: 388232
Опубликовано: 01.01.1973
Автор: Гор
МПК: G01R 25/00
...мосту СФ подводится напряжение сети.Сццусоидальцые напряжения от датчика тока ДТ и статического фазовращающего моста СФ после одцополупериодцого выпрямления ца диодах Оз - 1 е преобразуются в прямоугольные импульсы уточки А и Б фиг, 1, 3882325 10 15 20 25 30 35 40 фиг. 2, а), В качестве формирователей прямоугольных импульсов применены нормально открытые триоды Ть Тз. Триоды Т 2 и Т, являются усилителями-инверторами, необходимыми для более точной работы датчика.На цепочках ЯС и Я 2 С происходит дифференцирование прямоугольных импульсов, и в точках В и Г (фиг. 1) появляются импульсы экспоненциальной формы и одной полярности.Появление импульсов соответствует прохождению тока и напряжению сети через нулевые значения.Напряжение импульсов...
Способ регулировки датчиков-реле температуры с биметаллическими хлопающими элементами

Номер патента: 1247686
Опубликовано: 30.07.1986
Авторы: Гордиенко, Романенко, Сердюков
МПК: G01K 15/00
Метки: биметаллическими, датчиков-реле, регулировки, температуры, хлопающими, элементами
...датчика-реле. При нагревании центр биметаллического элемента 2 перемещается вниз, в направлении уменьшения кривизны (кривая а , фиг. 2).Контакты 4 и 6 датчика-реле при этом в какой тр момент замкнутся.Замыкание контактов 4 и 6 является разрешением на перемещение основания 1 с гнездом для биметаллического элемента. Перемещение производится дозированно, на одну ступень (кривая с фиг.2), и. со скоростью, на порядок,превьппающей скорость перемеще" ния центра биметаллического элемента 2 под воздействием температуры. Поскольку перемещение основания 1 с гнездом производится вверх, то это ведет к размыканию контактов 4 и 6, Под действием температуры центр биметаллического элемента 2 продолжает перемещаться вниз, и вновь происходит замыкание...
Устройство для ввода информации от дискретных датчиков
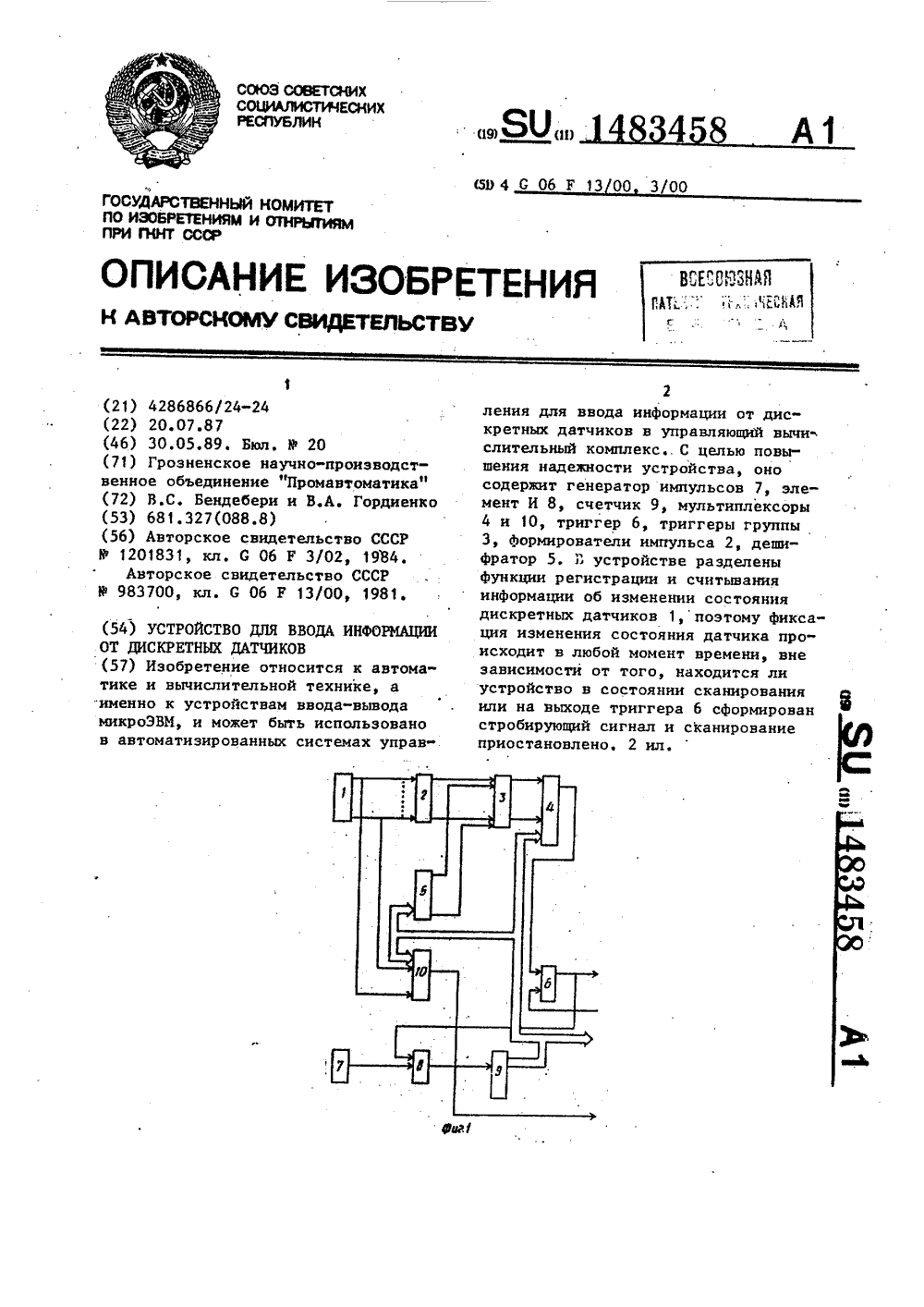
Номер патента: 1483458
Опубликовано: 30.05.1989
МПК: G06F 13/00, G06F 3/00
Метки: ввода, датчиков, дискретных, информации
...элемент И 8, чем прекращает поступление импульсов от генератора 7 импульсов на вход счетчика 9. Одновременно выходной сигнал триггера 6 поступает в вычислительный комплекс и иформирует о факте переключения дискретного датчика 1.В таком состоянии двоичный код на выходе счетчика 9, являющийся адресным выходом устройства, определяет номер сработавшего датчика. Выходы счетчика 9 подключены к адресным входам первого мультиплексора 10, благодаря чему на выход мультиплексора 10 поступает сигнал от дискретного датчика, состояние которого изменилось. Выход мультиплексора 10, являющийся информационным выходом устройства, вводится в вычислительный комплекс и позволяет оценивать значение сигнала дискретного датчика, состояние которого...
Предыдущий патент: Способ регулирования группы асинхронизированных синхронных двигателей и асинхронного двигателя производственных механизмов
Следующий патент: Способ возбуждения маятниковых колебаний ротора двухфазного асинхронного двигателя
Случайный патент: Установка для охлаждения двигателей внутреннего сгорания, например авиационных