Способ определения положения экскаватора-драглайна в пространстве
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1121356
Авторы: Беспалова, Ворончихин, Перминов, Филиппенко


Текст
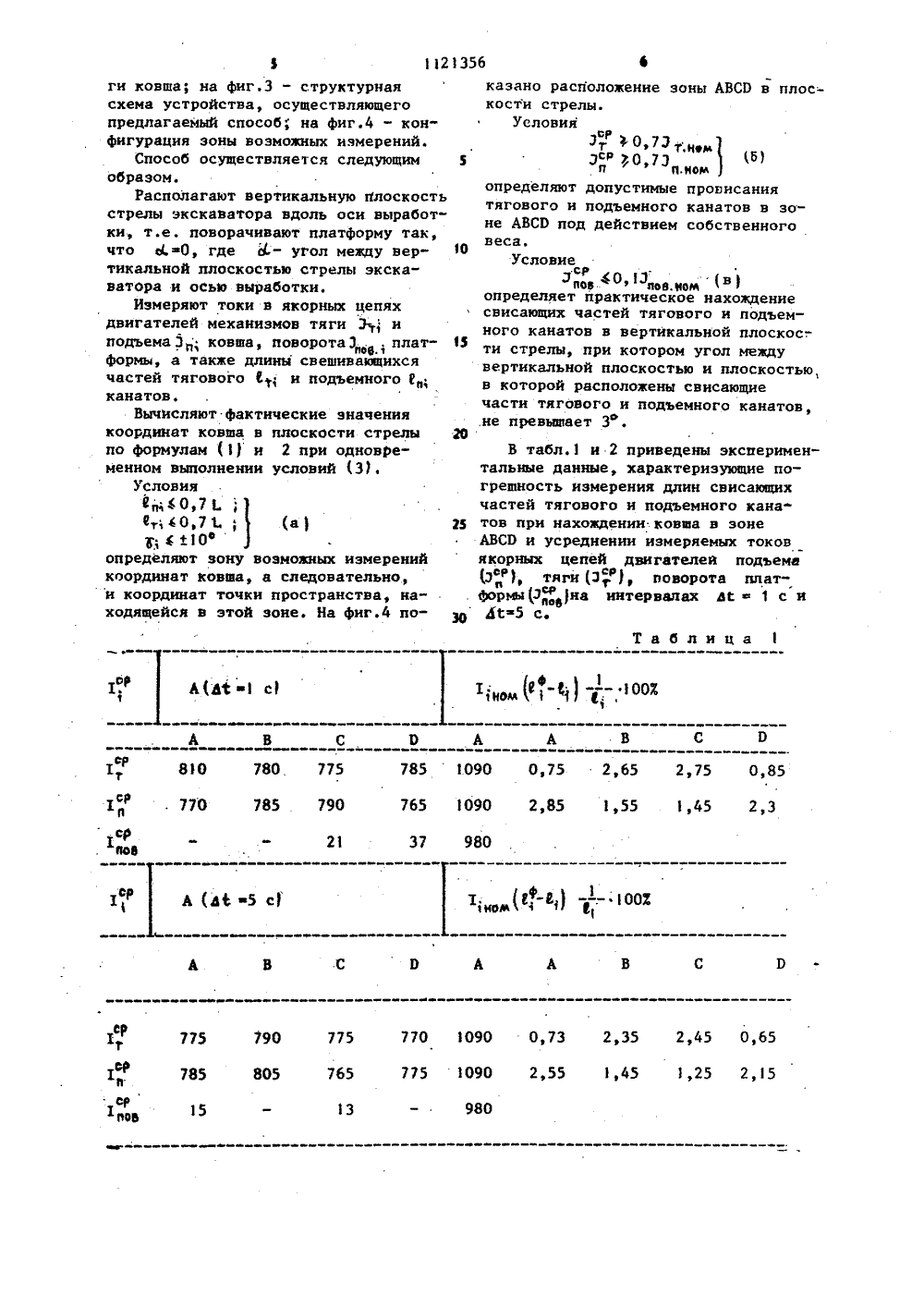
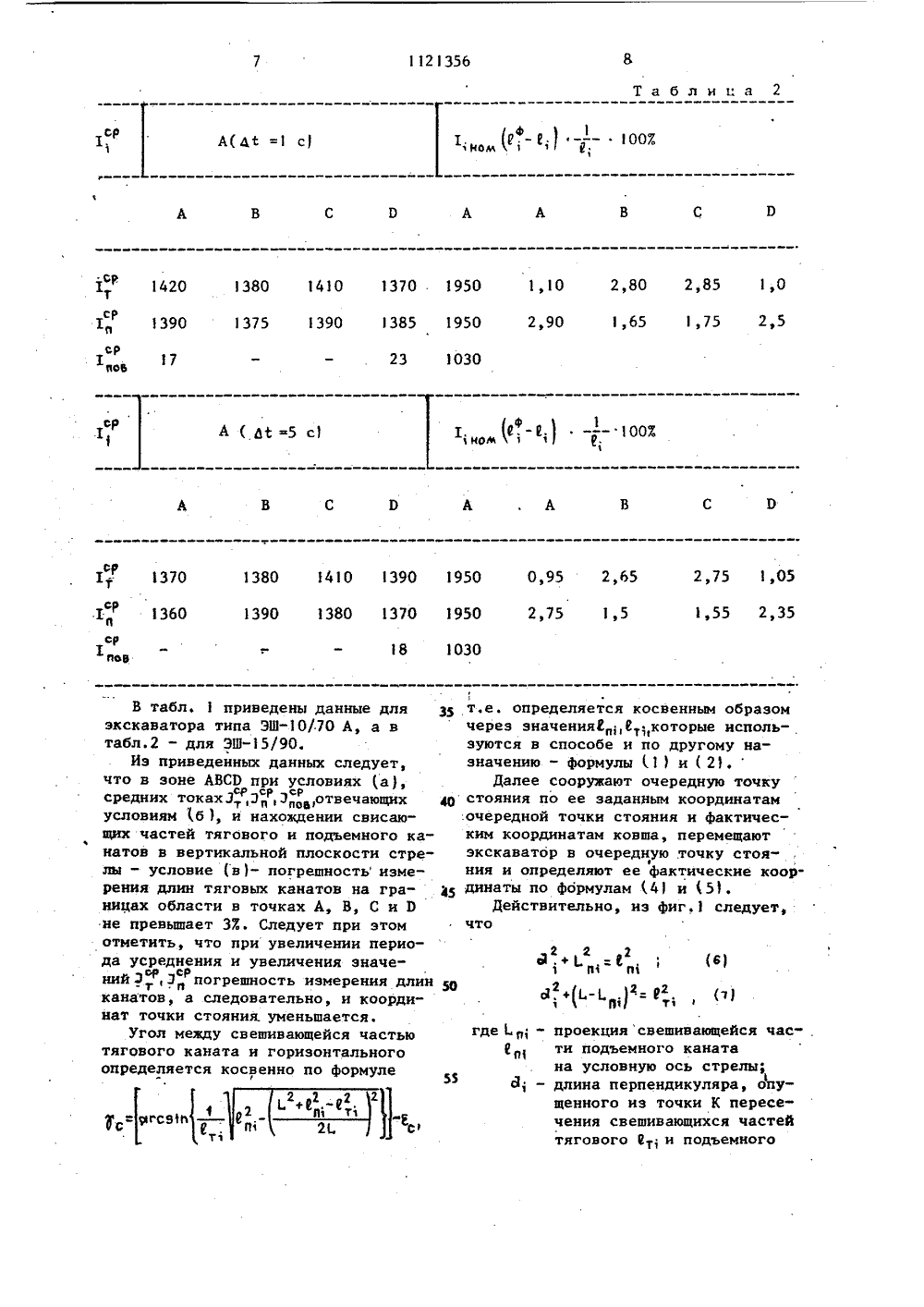
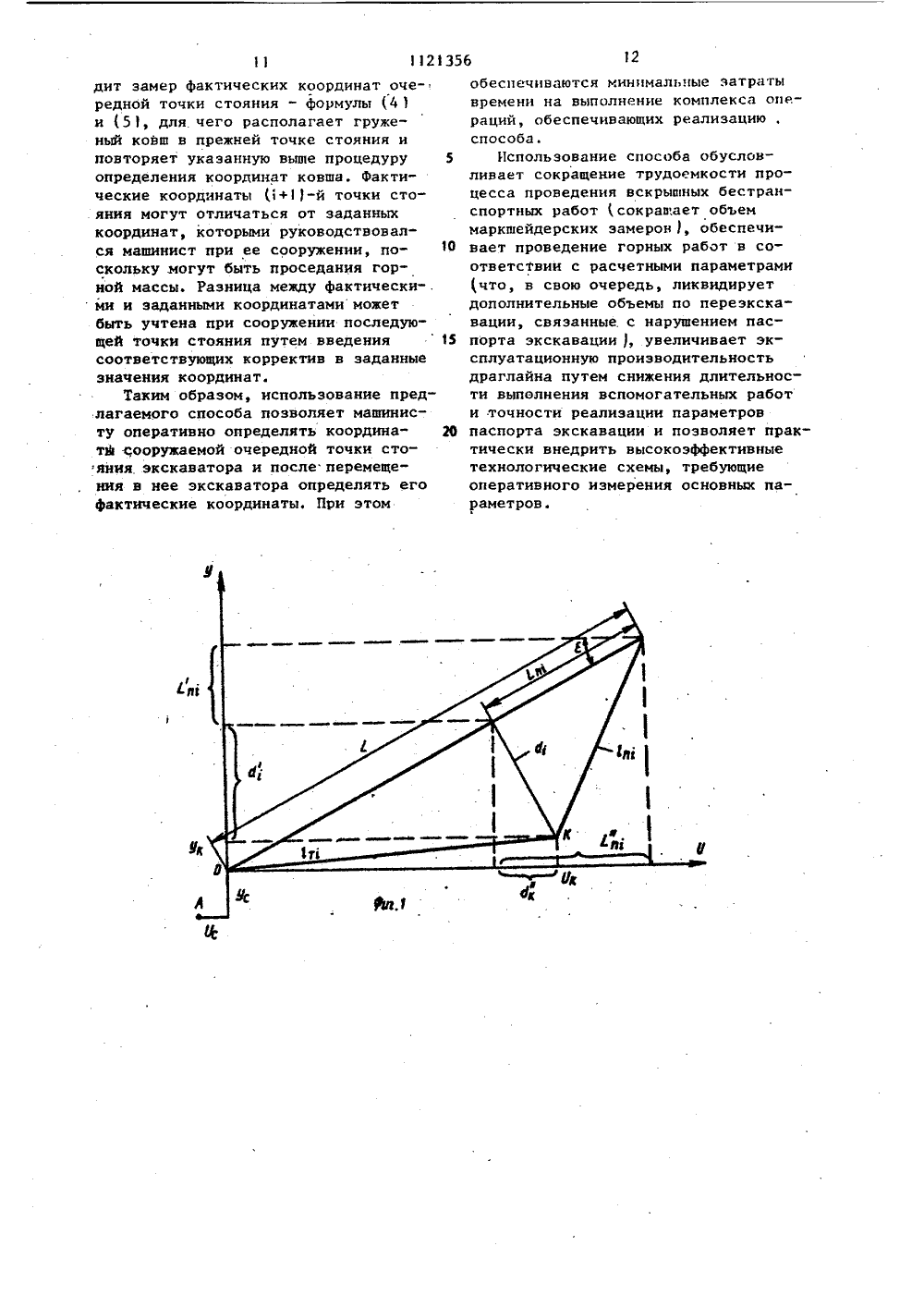
СОЮЗ СОВЕТСКИХещюлипаипжикРЕСПУБЛИК 5 А 2 Р 348 ГОСУД АРСТВЕКК О ДЕЛАМ ИЗОБ Омитет сссИЙ И ОТКРЫТИ ОБРЕТЕНИЯ ИДЕТ ЕЛЬСТВ(21) 3616362/29- (22) 19.05.83 (46) 30.10.84. Б (72) О,И.Беспало С,В.Ворончихин и (71) Государстве структорский и н ский институт по ной промышленнос (53) 621,879.38( у .=1 -к 1 и(54) (57) СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭКСКАВАТОРА-ДРАГЛАЙНА В ПРОСТРАНСТВЕ, основанный на измерении угла наклона вертикальной плоскости поворотной платформы экскаватора в направлении оси выработки и вычислении координат очередной точки стояния экскаватора, о т л и ч а ю щ и й с я тем, что, с целью упрощения и повышения точности определения координат экскаватора, располагают вертикальную плоскость стрелы экскаватора вдоль оси выработки, а груженый ковш - в зоне очередной точки стояния, измеряют токи в якорных цепях двигателей механизмов тяги ковша, подъема ковша и поворота платформы, длины свешивающихся частей тягового и подъемного канатов, вычисляют фактические значения координат ; иковша в плоскости стрелы по фор- м сооружаютперемещаполагают точке стояиеф и выч и ф1+1 сф:О,-О +Ос к сот очки и радхода с вращения ъемног вов;- расстоян схода тя го канат межд вого чк подъемно 1 кмула с направляю ОПИСАНИЕ К АВТОРСКОМУ С,- е)с 05( +Я,)+ ттном3 Р) О,7 Зи. номсР (О 13повпов. номВ; 4 011,Д, ь О,1.у, + юо,по вычисленным значениямочередную точку стояния,ют в нее экскаватор, расгруженый ковш в прежнейния и фактическое значенОФ очередной точки сто1+1ляют по формулам а с направляющих шки,О -с с ср ср срт аапов,тном оном,новномВ горизонталью. где Ьр -шкивов ( условная ось стре-лы);6 п.,К 1- длины свешивающихся частейп 1 т 1подъемного и тягового канатов.Ес - угол наклона условной осистрелы к горизонту;Ея - угол наклона поворотнойплатформы к горизонту вплоскости стрелы;1,0;- координаты -й точки стояния,Изобретение относится к измерению технологических параметров проведения вскрышных бестранспортных работ с использованием экскаваторовдраглайнов.Известны способы, реализуемые устройством 11 для определения положения карьерного экскаватора в пространстве и устройством23 для определения положения экскавациоиной машины в пространстве.Известные способы не позволяют оперативно и без значительных эа" трат времени на выполнение дополнительных операций, а также с достаточной точностью определять полозение экскаватора в трехмерном прост-, ранстве.Наиболее близким к предлагаемому по технической сущности является способ,1.31 определения положения экскаватора-драглайна в пространстве, основанный на измерении угла наклона вертикальной плоскости поворотной платформы экскаватора в направлении оси выработки и вычислении координат очередной точки стояния экскаватора по формулеКъ = ЕЮ еР;е; начальное значение аппликаперемещение экскаватора;угол наклона плоскости платформы в точке стояния послезавершения 11"го шага, отме.ренный от горизонтальной линии против часовой стрелки;порядковый номер точки стоянчя; координаты начала системыкоординат в плоскости стрелы;средние и номинальные токиякорных цепей приводов тяги и подъема ковша, ново"рота платформы;угол между свешивающейсячастью тягового каната и При этом измеряют также перемещение экскаватора вдоль выработки.Измерение угла наклона плоскости платформы производят при поднятых 5 опорах, а измерение перемещения экскаватора - прн включенном приводе механизма шагания. Известный способ позволяет определять координату вдоль осн выработки и аппликату, при этом определение укаэанных координат осуществляется в процессе перемещения экскаватора. Таким образом, известныйспособ требует значительного времени для проведения вспомогательныхработ, связанных с определением координат точки стояния, поскольку измерение их значений производитсятолько после установки экскаваторав точку стояния. При расхождениифактических и заданных значений координат необходимо вновь переместитьэкскаватор с точки стояния и произвести соответствующие горные рабо -ты. Следовательно,в этом случае име.ют место непроизводительные (вспомогательные) работы, которые существенно влияют на эксплуатационнуюпроизводительность экскаватора. Кро;Зо ме того, при использовании способавозможна значительная погрешностьизмерения координат из-за накопления ошибки в процессе измерения,особенно при корректировке коорди нат очередной точки стояния с производством соответствующих горных работ..Цель изобретения - упрощение и по вышение точности определения координат экскаватора.12+ 2 т озР +сп )со 5(Е ФЯ,)+ О,=г в 1 пЕ +Е,.1 временном выполнении ус при вий 3 ъО т но Э ЪОчЭ ипном ср пое 1 пов.н 4 0,7 ту +10,по вычисленным очередную точк в нее экскават значениям сооружаютстояния, перемещают р, располагают груежней точфке стояния начение У, и Оф1+1стояния вычисляют ный ковш в ифактическоеередной точкформулам ф1+1Ф 5) диус вращения:О,-О +1+1 1 С - высота иточки схо деЪ а подъемного каПоставленная цепь достигается тем, что согласно способу определе-ния положения экскаватора-драглайна в пространстве, основанному на измерении угла наклона вертикальной плоскости поворотной платформы экскаватора в направлении осн выработки и вычислении координат очередной точки стояния экскаватора, располагают вертикальную плоскость стрелы экскаватора вдоль осн выработки, а груженый ковш - в зоне очередной точки стояния, измеряют токи в якорных цепях двигателей механизмов тяги ковша, подъема ковша и поворота платформы, длины свешивающихся частей тягового и подъемного канатов, вычисляют фактические значения кодр- динатМ; и 0; ковша в плоскости стрелы по формулам ната с направляющих щкйнов;расстояние между точкамисхода тягового и подъемно го канатов с направляющихшкивовусловная ось стрелы);Йп.,Рт, - длины свешивающихся частейподъемного и тягового ка О натов;Ес - угол наклона условной осистрелы к горизонту;Еп, - угол наклона поворотнойплатформы к горизонту в 15 плоскости стрелы;Ю,О; - координаты 1-й точки стояния;1 С,О . - координаты начала системыкоординат в плоскости 20 стрелы;3 т,3,3 п, - средние и номинальныеСР СР ср1токи якорных цепей при-,тном 1 п,ном, водов тяги и подъема ковЭпоша, поворота платформы;угол между свешивающейсячастью тягового каната игоризонталью.Используя предлагаемый способ, машинист экскаватора, располагая груженый ковш в зоне очередной точкистояния, определяет ее фактическиекоординаты. В случае отличия координат предполагаемой точки стояния отзаданных машинист экскаватора производит соответствующие горные работы подсыпает горную массу или перемещает излишнюю в отвал),не затрачивая времени на перемещение экскаватора в очередную точку стоянияс целью определения ее фактических 40. координат. Более того, после перемещения экскаватора в очереднуюточку стояния машинист определяетфактическое положение экскаватора,располагая ковш в прежней точке стояния, что позволяет повысить точность определения координат вследствие учета неизбежных отклоненийв координатах очередной точки стояния при последующих передвижках экскаватора без затрат времени на непроизводительную работу экскаватора по сооружению точки стояния с минимальными отклонениями координат .от заданных значений.55 На фиг.1 показано взаимное расположение стрелы, ковша и канатов драглайна; на фиг.2 - диаграмма загруз"ки двигателей приводов подъема и тя"А(ДС 5 с) В В А 2,75 1,05 1,55 2,35 1"370 1380 1410 1390 1950 0,95 2,651390 1380 1370 1950 2,75 1,5 1 Р 1 ЗЬО ер фз 18 1030 50 где 1.д,- е,проекциясвешивающейся части подъемного канатана условную ось стрелы;длина перпендикуляра, опущенного из точки К пересечения свешивающихся частейтягового 9 т;и подъемного 55 яГС 81 В табл, 1 приведены данные дляэкскаватора типа ЗШО/70 А, а втабл.2 - для ЭШ/90,Иэ приведенных данных следует,что в зоне АВСЭ при условиях ),а),средних токахЗт,Эд,Э ,отвечающихср ср срусловиям 16 ), й нахождении свисающих частей тягового и подъемного ка"катон в вертикальной плоскости стрелы - условие (в- погрешностьизмерения длин тяговых канатов на границах области в точках А, В, С и 0не превышает 37. Следует при этомотметить, что при увеличении периода усреднения и увеличения значений Э ,Э погрешность измерения длинвр срканатов, а следовательно, и координат точки стояния уменьшается.Угол между свешивающейся частьютягового каната и горизонтальногоопределяется косвенно по формуле т.е. определяется косвенным образом через значениями;,6 т;,которые используются в способе и по другому назначению - формулы) и ( 2).Далее сооружают очередную точку ,щ стояния по ее заданным координатам:очередной точки стояния и фактическим координатам ковша, перемещают экскаватор в очередную .точку стояФния и определяют ее фактические коор" 5 динаты по формулам 14) и 15).Действительно, иэ фиг. следует,что)г 2356 Ю дит замер фактических координат очередной точки стояния - формулы 4и (5 , для чего располагает груженый ковш в прежней точке стояния и повторяет укаэанную выше процедуру определения координат ковша. Фактические координаты 1+1)-й точки стояния могут отличаться от заданных координат, которыми руководствовался машинист при ее сооружении, поскольку могут быть проседания горной массы. Разница между фактически-. ми и заданными координатамиможет быть учтена при сооружении последующей точки стояния путем введения соответствующих корректив в заданные значения координат.Таким образом, использование предлагаемого способа позволяет машинис" ту оперативно определять координатй сооружаемой очередной точки сто:яния экскаватора и после перемещения в нее экскаватора определять его фактические координаты. При этом обеспечиваются минимальные затратывремени на выполнение комплекса операций, обеспечивающих реализацию ,способа.5 Использование способа обусловливает сокращение трудоемкости процесса проведения вскрышных бестранспортных работ сокращает объеммаркшейдерских замеров ), обеспечи- О вает проведение горных работ в соответствии с расчетными параметрамичто, в свою очередь, ликвидируетдополнительные объемы по переэкскавации, связанные. с нарушением пас порта экскавации ), увеличивает эксплуатационную производительностьдраглайна путем снижения длительности выполнения вспомогательных работи точности реализации параметров 26 паспорта экскавации и позволяет практически внедрить высокоэффективныетехнологические схемы, требующиеоперативного измерения основных параметров./5 ь д пал ППП "Патент", г. Ужго Проектна 9/22 ТираВНИИПИ Госудпо делам 13035, Москва,643рственного комиизобретений и оЖ, Раушская Корректор А. Знмокос Подпита СССРрытий
СмотретьЗаявка
3616362, 19.05.1983
ГОСУДАРСТВЕННЫЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ И НАУЧНО ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ПО АВТОМАТИЗАЦИИ УГОЛЬНОЙ ПРОМЫШЛЕННОСТИ
БЕСПАЛОВА ОЛЬГА ИВАНОВНА, ПЕРМИНОВ АЛЕКСАНДР СЕРГЕЕВИЧ, ВОРОНЧИХИН СЕРГЕЙ ВЕНИАМИНОВИЧ, ФИЛИППЕНКО АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: E02F 3/48
Метки: положения, пространстве, экскаватора-драглайна
Опубликовано: 30.10.1984
Код ссылки
<a href="https://patents.su/9-1121356-sposob-opredeleniya-polozheniya-ehkskavatora-draglajjna-v-prostranstve.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения положения экскаватора-драглайна в пространстве</a>
Способ дистанционного определения координат точки на плоскости

Номер патента: 102868
Опубликовано: 01.01.1956
Автор: Ильин
МПК: H04N 3/32
Метки: дистанционного, координат, плоскости, точки
...(1) свет попадает с передаваемого изображенпя через узкуго горизонтальную щель, что соответствует горизонтальной строке. дта ц 1 ель движется в вертпкальном направленпп с постоянной скоростью (кадровая развертка) до момента пересеченпя определяемой точки. В момент пергссченпя усиленный Фототок от определяемой точки одновременно подается на генераторы (3) и (1), вызывая генерпрованпе импульса остановки прпвода кадровоп рбзверткп п пмпульса, посылаемого в линию.П 1 п 1 вод (6) останавливает кадровую развертку на определенный интервал времени, достаточный для разверткп строки. На еотоэлемснт (6) строчной развертки свет попадает, проходя последовательно чсрсз две щслп - указанную выше горпзонтальнуго и вертикальную щель строчМ 02868...
Устройство для измерения координат точек по линии на плоскости

Номер патента: 1779911
Опубликовано: 07.12.1992
Авторы: Аюков, Балашов, Варжапетян, Жарехин, Нуйкин
МПК: G01B 11/02
Метки: координат, линии, плоскости, точек
...и два фотоприемника (см.фиг.З); фотоприемники расположены на линии направления движения каретки и включены в мостовую схему 45 (см.фиг,4).Устройство работает следующим образом.От генератора 3 СВЧ высокочастотныенемодулированные колебания поступают в 50 сдвоенный направленный ответвитель 4,где часть их мощности ответвляется в опорный канал, а остальная часть поступает на приемопередающую антенну(ППА) 7. ППА 7 излучает волну в сторону отражающей ан тенны 10, расположенной на каретке 2, гдес помощьюмодулятора 9 осуществляется модуляция по амплитуде частотой 1 кГц. и отражение в обратную сторону. Принятые ППА 7 промодулированные СВЧ-колебания, несущие информацию о фазе, проиорцио 1779911нальной расстоянию между антеннами, поступают через...
Двухпоточный гидравлический при-вод экскаватора c телескопи ческой стрелой

Номер патента: 810915
Опубликовано: 07.03.1981
Авторы: Буланов, Грязнов, Раннев, Седов, Сидякин, Смоляницкий, Шепель, Шкловский
МПК: E02F 9/22
Метки: гидравлический, двухпоточный, при-вод, стрелой, телескопи, ческой, экскаватора
...продольной оси, гидромотор 16 поворота платформы с магистралями 17 и 18, цилиндр 19 выдвижения стрелы с магистралями 20 и 21 и дифференциальным блоком 22, например, цилиндр 23 подъема стрелы, например, цилиндр 24 поворота ковша, гидромотор хода 25 с магистралями 26 и 27, магистраль 28 питания поршневой полости цилиндра 19 от группы 5 распределителей через распределитель 14; магистрали 29 и 30 - напорные соответственно насосов 1 и 2, магистрали 31 и 32 - сливные группы 4 и 5, а остальные - силовые магистрали общеизвестного назначения, элементы сервоуправления: источник давления 33, блоки 34 дистанционного управления (на чертеже указан один блок, который управляет распределителями 9 и 10, а два других однотипных ему управляют...
Устройство для определения координат точек криволинейной поверхности

Номер патента: 1783278
Опубликовано: 23.12.1992
МПК: G01B 5/20
Метки: координат, криволинейной, поверхности, точек
...2 основания 1 с воэможностью осевого перемещения и фиксации два щупа 30 с жалами 31,контактирующими с измеряемой поверх-ностью 4, Щупы подпружинены по осямпружинами 32 и зафиксированы в определенном положении фиксаторами 33, На корпусе 26 установлены также еще двателескопических щупа 34 со штоками 35,фиксаторами 36 и прижимами 37, которыеподпружинены по оси пружинами 38Регистратор координат 27 состоит изкорпуса 26, платформы 39, преобразователя координат 40 и отсчетного узла 41 с измерительным стержнем 42, П-образногокаркаса 43,Отсчетный узел 41 закреплен на Побразном каркасе 43. Преобразователькоординат 40 состоит из диска 44 и установленного коаксиэльно последнему ивзаимосвязанного с ним стакана 45. Преобразователь координат...
Устройство для измерения координат точек поверхности изделий

Номер патента: 1795704
Опубликовано: 27.03.1995
Авторы: Вагнер, Костюков, Черенков
МПК: G01B 11/03
Метки: координат, поверхности, точек
...углового( р) перемещения консоли 5, линейного перемещения В головки робота 4 и пинали 5 по оси Е, а также блоком управления робо.там (на чертеже не показан). Через базовую плиту 7 робот 1 соединен с двумя опорными колоннами 8 и 9, на которых шарнирно закреплены датчики перемещений 10 и 11, конструктивно выполненные в виде лазерных интерферометров 12 и 13, содержащих стабилизированные ла частоте лазеры 14 и 15, оптические делители 16 и 17 и другие оптико-электронные узлы, обеспечивающие работу интерферометрав. Лазерные интерферометры 12 и 13 соединены посредством полых телескопических стержней 18 и 19 с дисками 20 и 21, саосно закрепленными на головке робота 4 с возможностью вращения вокруг ее вертикальной оси. На дисках 20 и 21 жестко...
Предыдущий патент: Грейфер
Следующий патент: Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости
Случайный патент: Барабан для сборки покрышек пневматических шин