Способ автоматического регулирования параметров энергосистемы “юлика
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1297166
Автор: Терезов



Текст
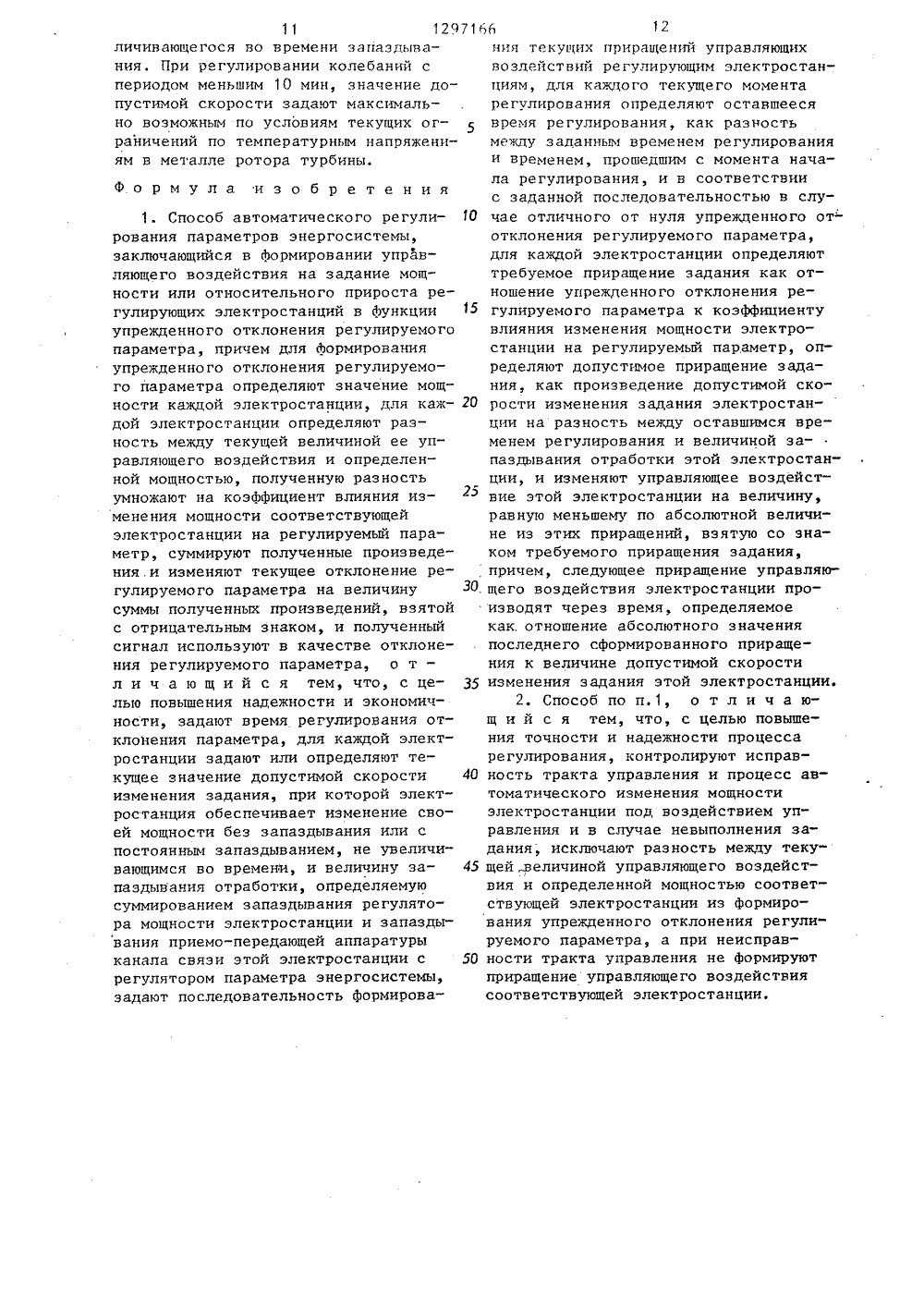
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ЯО, 12971 4 Н 02 Т 3/06 ПИСАНИЕ ИЗОБРЕТЕНИЯ СВИДЕТЕЛЬСТВУ К АВТОРСК Ж 3 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Объединенное диспетчерское управление энергосистемами СевероЗапада(56) Авторское свидетельство СССР 1 п 505085, кл. Н 02 Л 3/06, 1969.Авторское свидетельство СССР Р 843091, кл. Н 02 Л 9/06, 1979, (54) СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЭНЕРГОСИСТЕМЫ "ЮЛИКА"(57) Изобретение относится к области электроэнергетики. Цель изобретения - повьппейие надежйости, экономичности и точности. указанная цель достигнута в результате того, что приращение управляющих воздействий регулирующим электростанциям (Э) формируют в пределах, обеспечивающих отработку каждой Э, указанных приращений в течениезаданного интервала времени, отсчитываемого с момента возникновения отклонения регулируемого параметра.Ограничение амплитуды приращения управляющего воздействия производят сучетом индивидуальных динамическиххарактеристик Э: допустимой скоростиизменения мощности Э, времени запаздывания приемо-передающей аппаратурыканала связи Э с регулятором параметра энергосистемы и времени запаздывания регулятора мощности электростанции, Формирование приращений управляющих воздействий Э осуществляют споследовательно во времени в соответствии с выбранной очередностью, чтопозволяет достаточно просто применятьширокое резиообрезие критериев опте- Смального управления путем измененияочередности формирования указанныхприращений. 1 з.п.ф-лы, 1 ил, )иззу1 12971Изобретение относится к электроэнергетике и может быть использовано для автоматического регулированияпараметров нергосистемы, напримерперетоков мощности, частоты и напряжения.Целью изобретения является повышеение надежности и экономичности, атакже точности.На чертеже представлена блок-схема устройства, реализующего предлагаемый способ,Устройство содержит орган 1 измерения фактического отклонения регулируемого параметра, элемент 2 формирования упрежденного отклонения регулируемого параметра (РП), сумматор 3,блок 4 Формирования обратной переходной функции соответствующей электростанции, датчик 5 фактической мощности соответствующей электростанции,регулятор 6 мощности соответствующейэлектростанции, элемент 7 вычитаниясоответствующей электростанции, усилитель 8 с коэффициентом, равным коэффи-циенту влияния изменения мощности соответствующей элеКтростанции на регулируемый параметр, блок 9 с передаточной функцией, моделирующей переходнойпроцесс автоматического изменения мощ ности соответствующей электростанциипри изменении ей задания, схему 10запуска, счетчик 11 оставшегося времени регулирования, коммутатор 12 каналов электростанций, прерыватель 13 ка нала соответствующей электростанции,.усилитель 14 с коэффициентом усиления,обратнд пропорциональным коэффициентувлияния изменения мощности соответствующей электростанции на регулируемый 40параметр, управляемый ограничитель15 соответствующей электростанции,блок 16 ограничения соответствующейэлектростанции, запоминающий сумматор17 соответствующей электростанции, 45. ограничитель 18 темпа задания соответствующей электростанции, задатчик19 времени регулирования, умножитель20 соответствующей электростанции,задатчик 21 допустимой скорости изменения задания соответствующей электростанции, зацатчик 22 времени запаздывания регулятора и времени транспортного запаздывания канала связии соответствующей электростанции, задатчик 23 максимально и минимальнодопустимой мощности соответствующейэлектростанции, схему 24 управлениясоответствующей электростанции, преры 66 2ватель 25 канала обратной переходной Функции соответствующей электростанции, датчик 26 сигналов неисправности регулятора мощности и тракта управления соответствующей электростанции и управляемую схему 27 задержки соответствующей электростанции.Схема 10 запуска при наличии на входе отличного от нуля по модулю сигнала 8 равного ьР, Формирует на своем выходе сигнал постоянной амплитуды, который снимает при обнулении сигнала Я на ее входе:Я (С 0 при аР ф 0(1-)= 0 прн ьР = 0(1)Счетчик 11 при наличии на первом входе отличного от нуля сигнала(с) с заданным интервалом времени, например 1 с, производит пошаговое ступенчатое уменьшение сигнала Е (г.)и поступающего на второй вход счетчика, на величину, пропорциональную 1 с. Формируемый указанным образом сигнал является выходным сигналом счетчика 11 -. При достижении амплитудой сигнала Енаперед заданного мини 11мального значения счетчик сохраняет на выходе сигнал минимальной амплитуды на все время существования отличного от нуля сигнала я (с) и при сиг 1 анале с , равном нулю, производит мгновенный возврат амплитуды выходного сигнала к значению, равному сигналу б, , т.е, сигналу, пропорциональному заданному времени регулирования:остав при ьРФ 0и - С Т1рег6, = .1при аР(4:) 0 (2)Т при ьР-0Коммутатор 12 при отличном от нуля сигнале Ена втором входе с заданным циклом повторения, например 1 с, производит последовательное (поочередное) замыкание-размыкание и. своих контактов, где и - общее количество РЭС, В исходном состоянии (сигнал Е,(г) равен нулю или произошло его обнуление) все контакты коммутатора находятся в разомкнутом состоянии и коммутатор подготовлен к замыканию начиная с первого и кончая3 12 Ч 71 последним контактом. В любой текущий момент времени в замкнутом состоянии может находится только один контакт. Это означает, что перед замыканием очередного контакта предварительно размыкается контакт, замкнутый ранее. Полное время последовательного замыкания-размыкания всех и контактов с учетом возвратакоммутатора в исходное состояние должно укладываться 10 внутри заданного цикла повторения, например 1 с. Коммутатор осуществляет замылание-размыкание своих контактов в строгой последовательности: первый, второй, третий и т.д., и-й. Изменение 15 очередности замыкания каналов электростанций осуществляется путем Физического переприсоединения канала соответствующей РЗС к соответствующему контакту коммутатора. В случае приме нения программируемого коммутатора последовательность замыкания-размыкания контактов коммутатора может задаваться программным путем, при этом Физическое присоединение каналов РЭС 25 сохраняется неизменным.Прерыватель 13 размыкает цепь прохождения сигнала Г пропорциоЮ 1 нального дР (Г), на вход усилителя 14 на все время существования на втором ЗО входе прерывателя 13 отличного от нуля сигнала Е (с) или с , При нулевом значении указанных сигналов прерыватель 13 обеспечивает коммутацию (замыкание) указанной цепи.35Усилитель 14 производит усиление входного сигнала Е ., пропорционального дР , обратно пропорционально коэАФициенту влияния изменения 40 мощности соответствующей РЗС на регулируемый параметр: дР(3) К4Управляемый ограничитель 15 осуществляет ограничение амплитуды входного сигнала (ее абсолютного значения) Е, (с) до величины сигнала Я .(с) поступающего на второй вход управляемого ограничителя 15 с выхода умножителя 20:Я : - при 1 1 ЕК 41 .=Г 8 С 1 ГЕ,4 (") (4) при 3 Е1 О, (с) бб 4Блок 16 осуществляет ограничениеаМПЛИтУДЫ ВХОДНОГО СИГНаЛа Е 1, (а)в соответствии с условием: Е (С)с Гц. (С) +Г (Т)Г (С) (5)максмингде Г,з,- сигналы, поступающие с выхода задатчика 23, пропорциональные максимально и минимальнодопустимой мощности соответствующей РЭС.е. (г) - сигнал, поступающий с выхода запоминающего сумматора 17, пропорциональный текущему значению задания соответствующей РЭС в момент,предшествующий замыканию канала этойэлектростанции (2,. (Запоминающий сумматор 17 осуществляет одноразовое суммирование к текущему значению сигнала е , пропорционального 2,(г-), сигнала С ( )пропорционального д 2, д" ), поступившего на его вход при замыкании канала соответствующей электростанции,и запоминает новое значение сигналаЕ 1,. , пропорционального 2.(Г+дС")на все время до поступления на еговход нового значения сигнала е (с)%отличного от нуля, д; - время, необходимое для Формирования прираще%ния задания д 2 (д, ) -й электростанции на выходе сумматора 17.Ограничитель 18 осуществляет Формирование (разворот во времени) приращения сигнала Е,.(с ) со скоростью,задаваемой задатчиком 21. Таким образом, сигнал на выходе запоминающегосумматора 17 изменяется скачком навеличину сигнала Е . , пропорцио 1 161нального д 2;(д; ), а на выходе ограничителя 18 сигнал е .(С) изменяется18на величину сигнала д 2;(д; ), линейного во времени со скоростью, задаваемой задатчиком 21,С помощью задатчика 19 устанавлиВаЕтСЯ СИГНаЛ а 1 (а) ПРОПОРЦИОНаЛЬный заданному времени регулированияТУмножитель 20 осуществляет суммирование сигнала Е , пропорционального времени запаздывания регулятора мощности соответствующейэлектростанции, с сигналом Е ". ,пропорциональным времени транспортного запаздывания канала связи этойэлектростанции, полученную сумму вычитает из сигнала, пропорционального оставшемуся времени регули.ьтат вычитания пре - нала Е (г-) на соответствующий7перед заданному вход блока 9 на время, пропорциональтельному значению, ное сигналу Е, , поступающему сть умножает на от задатчика 22,опорциональный Устройство работает следующим об 10при асто,.в(") 15С помощью задатчика 21 устанавливается сигнал Е,.(г-) пропорциональный допустимой скорости изменениязадания соответствующей РЭС.С помощью задатчика 22 устанавлиРваются сигнал Е , , пропорцио -нальный времени,запаздывания регулятора мощности соответствующей электростанции ( , ), и сигнал Е (Г),пропорциональный времени транспортного запаздывания, канала связи этойэлектростанции с регулятором параметра энергосистемы (1 . ).С помощью задатчика 23 устанавливаются сигналы Я,з, (г.) и е , (г) 30пропорциональные максимально и минимально. допустимой мощности соответствующей РЭС.Схема 24 при появлении на второмвходе сигнала Е , отличного от З 5 канию первого контакта.нуля, устанавливает на своем выходесигнал постоянной амплитуды на время,определяемое как частное от деленияабсолютного значения сигнала Е, .1 бна сигнал Е, (Е), поступающий на 40первый вход схемы с выхода задатчика 21., По истечении указанного времени сигнал на выходе схемы управленияснимается.Прерыватель 25 при отличном отнуля сигнале Е,размыкает цепьмежду выходом соответствующего блока4 и соответствующим входом сумматора3, при отсутствии сигнала от датчика26 обеспечивает постоянную коммутацию указанной цепи.Датчик 26 Аормирует на своем выходе сигналы постоянной амплитудыпри неисправности регулятора мощности и тракта управления с соответствующей РЭС. В противном случае сигнал на выходе датчика отсутствует.Управляемая схема 27 осуществляетзадержку во времени прохождения сигрования, Если резулвышает или равен наминимальному положито полученную разносигнал Е , пр21;допустимой скорости изменения задания соответствующей РЭС, в противном случае умножает сигнал Е(с) на указанное минимальное значение: разом.При возникновении в момент времени г отличного от нуля отклонения РП, лР(г)0, схема 10 вырабатывает сигнал Е 1 который снимается только при достижении сигналом аР(г.) нулевого значения. При поступлении управляющего сигнала Е(1-) на вход коммутатора 12 последний с заданным циклом повторения (например, 1 с) производит поочередное замыкание-размыкание своих контактов, В течение одного цикла работы (1 с) коммутатор обеспечивает поочередное замыкание-размыкание всех своих контактов:от первого до п-го, где и общее количество РЭС. Полное время замыкания-размыкания всех и контактов с учетом временина возврат коммутатора в исходное 11состояние , ь 1,: 1 с. Такая работа коммутатора 12 продолжается в течение всего времени пока на его входе существует отличный от нуля управляющий сигнал Е 1 О(г.). При исчезновении сигнала Е, (:) коммутатор 12 прерывает свою работу и возвращается в исходное состояние, т.е. готов к замыПри поступлении на второй вход счетчика 11 сигнала е (г), отличного от нуля, последний с заданным интервалом времени, равным циклу коммутатора 12, например 1 с осуществляет ступенчатое уменьшение амплитуды сигнала, поступающего на его второй вход. Это означает, что один раз в секунду амплитуда сигнала Е45 уменьшается ступенчато на величину, пропорциональную одной секунде. При достижении амплитудой сигнала Е наперед заданного минимального значения счетчик 11 сохраняет сигнал 50 Е минимальной амплитуды на весьпериод времени, пока не будет снятсигнал Е. При отсутствии илиснятии сигнала Е,счетчик 11возвращается в исходное состояние и 55 на его выходе существует сигнал Я(С)равный по амплитуде сигналу Е ( ),который, в свою очередь, пропорционален заданному времени регулирования Т.9 12971 сигнала на выходе ограничителя с сигналом С.( + ь, ), поступающим на его вход.Таким образом, уже на первом цикле работы коммутатора 12 будут сформиро 5 ваны приращения заданий такому количеству РЭС и на такую суммарную величину, которая необходима дпя подавления возникшего отклонения РП за заданное время регулирования Т , . На 1 О следующем цикле работы (через 1 с) коммутатор 12 снова начинает осуществлять последовательное замыкание каналов РЭС начиная с первой электростанции. Для РЭС которым было сфор мировано приращение задания на предшествующем цикле, из-за прерывателей 13, получающих сигнал от соответствующих схем 24, каналы останутся разомкнутыми. Для РЭС, которым не сформировано приращение заданий на предшествующем цикле, будет производиться замыкание их каналов, однако в силуФравенства нулю дР (+ь ) в течение всего процесса регулирования этим 25 РЭС также не будет сформировано при- ращение заданий.Из-за различия величин сформированных приращений заданий и допустимых скоростей изменения мощности РЗС,30 время восстановления каналов электростанций схемами 24 управления через прерыватели 13 будет различно, однако в силу равенства нулю сигнала дР (Г) в течение процесса регулирования этим 35 электростанциям также не будет сформировано дополнительных приращений заданий. Фактическое изменение мощности ФЭС, получивших приращение задания, приведет к нулю возникшее 40 отклонение РП. Схема 10 снимет управляющий сигнал и коммутатор 12 вернется в исходное состояние - процесс подавления отклонения РП завершится,При возникновении в течение заданного времени регулирования дополнительных возмущений в энергосистеме, в результате которых дР, ( ) станет отличным от нуля, например, в момент времени 2 на выходе счетчика 11 50 будет существовать сигнал, пропорциональный оставшемуся времени регулирования: Е(,) = Т, - (С - , )В результате умножители 20 соответствующих РЭС сформируют на своих 55 выходах сигналы, пропорциональные величинам допустимого приращения заданий соответствующим РЭС в момент вре 66 1 Омени2Управляемые ограничители 1) соответствующих РЭС произведут ограничение амплитуды входного сигнала (Г ) до значения,задаваемого сигналом (с 2),Таким образом, через коммутатор 12,который продолжает работать в силу отличногоот нуля сигнала Р( ),будет произведено изменение заданий некоторому дополнительному количеству РЭС,в результатечего сигнал (г. + с ) опять станет рав -2Юным нулю, а вновь сформированные прираще -ния заданий будут удовлетворять условиям (8) и (9). Изменение заданий вэтом случае произойдет как для РЗС,не получавших ранее приращений заданий, так и для РЗС, ограничители темпа задания которых произвели обработку предшествующих приращений (прерыватели 13 восстановили каналы этихРЭС), В результате процесс подавленияотклонения РП с учетом дополнительного возмущения также будет завершенза заданное время регулирования,Если в процессе отработки приращения задания регулятор мощности какой-либо РЭС вышел из работы, то посигналу от датчика 26 прерыватель 25разорвет цепь сигнала обратной переходной функции этой электростанции,сигнал Е (г-) станет отличным от нуля и через коммутатор 12 будет изменено задание необходимому количествуРЭС, которые обеспечат подавлениевозникшего внутреннего возмущенияв системе регулирования за оставшеесявремя регулирования. При этом с помощью прерывателя 13 этой РЭС исключается возможность формирования приращения задания на все время существования сигнала неисправности регулятора мощности этой РЭС.При цоступпении от датчика 26 сигнала о неисправности тракта управления соответствующей РЭС прерыватель13 разрывает цепь прохождения сигнала с выхода коммутатора 12 на входусилителя 14 этой электростанции навсе время неисправности тракта управления,При регулировании параметров энергосистемы с периодом колебаний 1015 мин и более, значение допустимойскорости изменения задания тепловымэлектростанциям выбирают с целью минимизации расхода топлива в переходныхрежимах работы энергоблоков при условии отработки этой скорости без уве 11 129 личивающегося во времени запаздывания. При регулировании колебаний с периодом меньшим 10 мин, значение допустимой скорости задают максимально возможным по условиям текущих ограничений по температурным напряжениям в металле ротора турбины.Формула изобретения 7166 12ния текущих приращений управляющих воздействий регулирующим электростанциям, для каждого текущего момента регулирования определяют оставшееся время регулирования, как разность между заданным временем регулирования и временем, прошедшим с момента начала регулирования, и в соответствии с заданной последовательностью в слу 1. Способ автоматического регули - рования параметров энергосистемы, заключающийся в Формировании управляющего воздействия на задание мощности или относительного прироста регулирующих электростанций в Функции упрежденного отклонения регулируемого параметра, причем для Формирования упрежденного отклонения регулируемого параметра определяют значение мощности каждой электростанции, для каждой электростанции определяют разность между текущей величиной ее управляющего воздействия и определенной мощностью, полученную разность умножают на коэффициент влияния изменения мощности соответствующей электростанции на регулируемый параметр, суммируют полученные произведения.и изменяют текущее отклонение регулируемого параметра на величину суммы полученных произведений, взятой с отрицательным знаком, и полученный сигнал используют в качестве отклонения регулируемого параметра, о т - л и ч а ю щ и й с я тем, что, с целью повышения надежности и экономичности, задают время регулирования отклонения параметра, для каждой электростанции задают или определяют текущее значение допустимой скорости изменения задания, при которой электростанция обеспечивает изменение своей мощности без запаздывания или с постоянным запаздыванием, не увеличивающимся во времени, и величину запаздывания отработки, определяемую суммированием запаздывания регулятора мощности электростанции и запаздывания приемо-передающей аппаратуры канала связи этой электростанции с регулятором параметра энергосистемы, задают последовательность Формирова чае отличного от нуля упрежденного отизменения задания этой электростанции. 2. Способ по п,1, о т л и ч а ющ и й с я тем, что, с целью повьппения точности и надежности процесса регулирования, контролируют исправность тракта управления и процесс автоматического изменения мощности электростанции под воздействием управления и в случае невыполнения задания, исключают разность между теку 40 45 щей величиной управляющего воздействия и определенной мощностью соответствующей электростанции из Формирования упрежденного отклонения регулируемого параметра, а при неисправности тракта управления не формируютприращение управляющего воздействиясоответствующей электростанции. отклонения регулируемого параметра,для каждой электростанции определяюттребуемое приращение задания как отношение упрежденного отклонения ре гулируемого параметра к коэффициентувлияния изменения мощности электростанции на регулируемый параметр, определяют допустимое приращение задания, как произведение допустимой ско рости изменения задания электростанции на разность между оставшимся временем регулирования и величиной запаздывания отработки этой электростанции, и изменяют управляющее воздейст-вие этой электростанции на величину,равную меньшему по абсолютной величине из этих приращений, взятую со знаком требуемого приращения задания,причем, следующее приращение управляю- ЗО. щего воздействия электростанции производят через время, определяемоекак.отношение абсолютного значенияпоследнего сформированного приращения к величине допустимой скорости129 11 бб Редактор А. Лежнина Техред А.Крав оррек ск аказ 790158 Тираж б ВНИИХИ Государственного к по делам изобретений и 13035, Москва, Я, Раушписное омитета СССРоткрытийская наб., д. Лроизво нно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
СмотретьЗаявка
3793940, 26.09.1984
ОБЪЕДИНЕННОЕ ДИСПЕТЧЕРСКОЕ УПРАВЛЕНИЕ ЭНЕРГОСИСТЕМАМИ СЕВЕРО-ЗАПАДА
ТЕРЕЗОВ ЮРИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: H02J 3/06
Метки: параметров, энергосистемы, юлика
Опубликовано: 15.03.1987
Код ссылки
<a href="https://patents.su/8-1297166-sposob-avtomaticheskogo-regulirovaniya-parametrov-ehnergosistemy-yulika.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического регулирования параметров энергосистемы “юлика</a>
Устройство для измерения отношения сигналпомеха и мощностей сигнала и шума

Номер патента: 1359759
Опубликовано: 15.12.1987
МПК: G01R 29/26
Метки: мощностей, отношения, сигнала, сигналпомеха, шума
...зависимости в рабочем диапазоне измеряемьи значений отношения сигнал/помеха и повышать почность его определения. Кроме того, без изменения содержимого памяти вычислителя 9 возможна калибровка устройства под реальный квадратичный детектор 1 путем изменения значения коэффициента а в памяти вычислителя 9.По полученному значению отношениясигнал/помеха и мощности сигналаР вычисляется мощность шума Р ссиспользованием зависимости РЫРВьиисление в вычислителе3 9 оценки энергетических параметроввходной смеси сигнала и шума производится следующим образом: мощностьсигнала, мощность шума, отношениесигнал/помеха, по командам из блока6 управления поступают на блок 10регистрации, где производится ихзаписьи отображение в удобном дляпотребителя...
Устройство для измерения отношения “сигнал-помеха” и мощностей сигнала и шума каналов связи

Номер патента: 1109681
Опубликовано: 23.08.1984
МПК: G01R 29/26
Метки: каналов, мощностей, отношения, связи, сигнал-помеха, сигнала, шума
...введены два термисторных преобразователя,.квадратор и второй блок вычитания,81 2при этом выход линейного детектора через первый термисторный преобразователь соединен с первым входом первого блока вычитания и с входом квадратора, выход которого соединен с первым входом второго блока вычитания, второй вход последнего через второй термисторный преобразователь соединен с,выходом квадратичного детектора, выход второго блока вычитания через блок извлечения квадратного корня соединен с вторым входом первого блока вычитания, с первым входом блока регистрации и с одним из входов блока деления напряжений, второй вход которого подключен к выходу первого блока вычитания и к второму входу блока регистрации, третий вход которого соединен с выходом...
Устройство для фиксации моментов времени, соответствующих фазе синусоидального сигнала

Номер патента: 587613
Опубликовано: 05.01.1978
МПК: H03K 5/153
Метки: времени, моментов, сигнала, синусоидального, соответствующих, фазе, фиксации
...28 2, а задний фронт прекращает прямой счет, разрешает обратный счет счетчика 8 и прямой счет счетчика 9.При прямом счете в счетчике 8 записывается числоУ,"к 2 К Ргде Т- период входного синусоидального сигнала,Задний фронт имщбьса, поступивший 38а первый вход блока управления 2,рекращает подачу иа счетные входысчетчиков 8 и, 9 импульсов с периодомК Т, и разрешает подачу импульсов спериодом Т. 40Таким образом, обратный счет счетчика Ъ и прямой счет счетчика 9 происходит с большей частотой, чем прямойсчет счетчика 8.При обратном счете нулевое состояние счетчика 8 наступает через времяо,с кх 1 гвремя наступленйя первого нулевогосостояния счетчика 8 с момента началапериода входного синусоидальиого нап- уряжения"хУ 1- Ф - Уен,с,ос...
Устройство для автоматической регулировки мощности сигнала

Номер патента: 1091305
Опубликовано: 07.05.1984
Авторы: Лаптев, Репин, Тулин, Харчев
МПК: H03G 3/20
Метки: автоматической, мощности, регулировки, сигнала
...Яня нход направленного ответвителя 3 поступает Фазомодулированцый сигнал. Этот сигнал проходит через направленный ответнитель 3 на вход полосового фильтра 4, (/1 ириня полосы пропускания полосового фильтра 4 удовлетворяет условию Я ( 5 оп ш 0/где о/,е- частота вход - ного сигнала, Полоса пропускания этого Фильтра в предлагаемом устройстве значительно (дире (ца два-три порядка )полосье проускания известного полосового Фильтра,Полезной спектральной составляющей выходного сигнала - сигнала некратного преобразования частоты - является одна из боковых Фязомодулированного сигнала, например спектральная составляющая с частотойо +ЯмС второго выхода бокового плеча направленного отнетвителя 3 часть мощности сигнала подается на вход...
Устройство для автоматической регулировки мощности сигнала

Номер патента: 560317
Опубликовано: 30.05.1977
Авторы: Григорянц, Колосов, Лаптев
МПК: H03G 3/20
Метки: автоматической, мощности, регулировки, сигнала
...управления амплитудой напряжения которого подсоединен к выходу управляющего эле. мента 5.или Устройство работает следующим образом.При подаче на вход генератора 1 с внешним возбуждением сигнала с частотой со и на вход фазового модулятора 2 от дополнительного генератора 9 сигнала с частотой И на входе полосового фильтра б будет существовать спектр частот, определяемый соотноше- нием У =У,з 1 п(щ 1+тфв 1 пй 1) =У,1,(тф) з 1 п (а + пй) =Ап (Утф) з 1 п Х Х (ф+ ий,)где К, - амплитуда несущей частоты;Л, - амплитуда п-ой боковой составляющей;У(тф) - функция Бесселя п-го порядкаот аргумента;тф - индекс фазовой модуляции.Таким образом, амплитуда любой составляющей спектра сигнала Ап. является функцией амплитуды несущей частоты и индекса...
Предыдущий патент: Устройство для управления полумостовым транзисторным инвертором с выходным трансформатором
Следующий патент: Устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме
Случайный патент: Способ лечения врожденного недоразвития кисти у детей с гипопластическими фалангами