Способ управления трехфазным регулируемым мостовым инвертором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1554094
Автор: Олещук







Текст
ние на момент времени, равный длительности упомянутых импульсов управления. На нижних временных диаграммах(Фиг. 1,а-е) представлены соответст 5вующие участки кривой линейного выходного напряжения трехфазного инвертора,Временные диаграммы, приведенныена Фиг. 1,а, соответствуют начальной(минимальной) выходной частоте преобразователя Р . В этом случае тактовый интервал от 60 до 120 эл,град,разбит на пять отрезков, равной длительности, равной 12 эл. град., внутри и посередине каждого из которыхформируются управляющие импульсы проВ4должительностью Ф =12 -- =12 - =о=9,6 эл,град, При этом местоположения середин управляющих сигналовСш, Со, Со на первой половине тактового интервала, вычисляемые как2-1С =60(1+ в в ) соответственно равю 25ны 66 эл.град., 78 эл.град и90 эл,град. (в данном случае, при нечетном И=5, третий по счету управляющий сигнал Формируется в серединетактового интервала), На тактовоминтервале от 240 до 300 эл.град. аналогичным образом вырабатываются сигналы на включение вентилей, местоположения центров включающих сигналовпри этом равны соответственно 246,258 и 270 эл,град. На вторых половинах тактовых интервалов на всем диапазоне регулирования местоположениясередин управляющих импульсов определяются симметрично,40Регулирование частоты выходногонапряжения инвертора при рассматриваемом алгоритме управления осуществляется за счет постоянной поэтапной вариации продолжительностей центральных на тактовых интервалах управляющих импульсов и длительностейпауз между импульсами на центральныхучастках тактовых интервалов 60-градусных продолжительностей. На подди 50апазонах регулирования, на которыхв центрах тактовых интервалов Формируются управляющие импульсы изменяемых длительностей, продолжительностьостальных сигналов управления не зависит от текущих значений выходнойчастоты инвертора и определяется из1д соотношения ф=- --- т -- , гдеЗНР (2 з.-1) количество Формируемых сигналов управления на каждой половине тактовыхинтервалов, включая центральный сигнал, На поддиапазонах регулирования,на которых регулирование осуществляется за счет изменения продолжительности центральных пауз между импульсами управления, длительности сигналов управленияварьируют в зависимости от текущих значений выходнойчастоты в соответствии с выражением1 1 1Ъ= - -(- -- -)Ро 1При анализируемом варианте связанного регулирования инвертора в диапазоне нечетного количества раз (И=5)на первом поддиапазоне регулированияизменение частоты (длительности периода) осуществляют путем измененияпродолжительности центрального на полупериоде импульса управления при неизменной длительности остальных импульсов, равной начальной , =д2 1УказанЗИР (21-1) ЗИРо 5 75 РОный процесс продолжается до моментадостижения выходной частотой инвертоН(2;-1)ра значения Р =Р - т ---- т ---1 о (2 1)2 2(1 1)5 (2 3-1) 25(2 3-1) -2 (3-1) 21 о фтором длительность центрального сигнала уменьшается до нуля (отмеченныймомент изображен на временных диаграммах на фиг. 1,б),На следующем подынтервале регулирования продолжительности формируемых внутри тактовых интервалов четырех импульсов управления (д=2) изме 1 1 няются в зависимости Ъ = - т (- -121 Р1 1 1 1- в -)= в (- - в -) вплоть до достиРИ 24,Р 5 Р,жения выходной частотой преобразованБ(21-1) теля значения Р =Р= - Ро, при котором центральная пауза уменьшается до нуля, Этот момент отображен на временных диаграммах, приведенных на фиг, 1,в. Дальнейшее повышение выходной частоты инвертора сопровождается последовательным изменением (уменьшением) длительности центрального на тактовом интервале сигнала управления при неизменной длительности других импульсов1554 хуправления, равной Ъ - ЗЯГЬ (21-1)2-1 1.Граница отмеченЗф 5"3 Р .45 ГЬо Ь5 ного поддиапазона наблюдается в дан-ном случае при величине выходной частоты инвертора, равной Р =Г =ЗН 15щ Р ю7 о 1 оф10Характерной особенностью предлагаемого способа управления является вариация алгоритма формирования управляющих импульсов в процессе регулирования инвертора. Так, в диапазоне пониженных выходных частот преобразователя, при Рс Р, абсолютные значения временных интервалов между центрами управляющих сигналов (не считая центральных сигналов) на по ловине каждого тактового интервала остаются неизменными, Относительные координаты местоположения середин -х, считая от начала тактовых интервалов, сигналов выключения и вклю чения вентилей на первых половинах тактовых интервалов на пониженных частотах определяются соответственно как 30 Р(21-1) 1С;=60 1+ --- - иР,гнР (21-1) 1С =604+---Р гь 1 50 эл,град., на вторых половинах так товых интервалов импульсы управления формируют симметрично. В диапазоне средних выходных частот преобраэова 31 Г 311 Г теля при Р = -- сГсР =Э2 5 ф 40 когда на каждой половине тактовых интервалов формируется по одному управляющему сигналу (х=1) с длитель 1 1 1ностью= в (- - в -), середины сигРь 11налов выключения и включения вентилей последовательно сдвигаются к середине тактовых интервалов, местоположения указанных середин определяются при этом соответственно из функциональных зависимостей С=783 117 НРп( 7 7 Р ) эл град Соответст 5515венно для 0=5 Р,= - Р Г =ЗР С( - - --- -) эл.град. и С =( ---7 7 Р "7 094 6585 Г--- -) эл. град,7 РВременные диаграммы сигналов управления и линейного выходного напряжения инвертора, соответствующиедиапазону средних выходных частот,представлены на фиг. 1,г,Кривые, изображенные на фиг, 1,д,показывают форму импульсов управления и выходного напряжения преобразователя при выходной частоте Р РЗЯ- Ро =ЗГ, ко гда продолжительностьпаузы между управляющими сигналамиуменьшилась до нуля, Начиная с этогомомента и до номинальной выходной частоты преобразователя Р=ИГО, изменение (увеличение) частоты сопровождается изменением (уменьшением) длительности центрального на тактовоминтервале управляющего импульса,осуществляемым в соответствии с за 1 1 1, 1висимостью= -- - ------6 Р 6 ИРо 6 Р ЗОЬвПри этом из-за того, что на повьппенных выходных частотах преобразоватеЗНля, при Г с Рс ЮРь, на каждом тактовом интервале формируется вместодвух управляющих сигналов по одномусигналу, число коммутаций в силовойсхеме инвертора на этом частотномдиапазоне уменьшается вдвое с соответствующим уменьшением величины коммутационных потерь.После уменьшения продолжительности 3 упомянутого управляющего сигнала до нуля, наблюдаемом при номинальной выходной частоте преобразователя Гь,=МГь=5 Ро, выходное напряжение преобразователя достигает своего максимального значения"(фиг. 1,е),Последуняцее увеличение выходной частоты инвертора производится принеизменной (максимальной) величиневыходного напряжения, что соответствует режиму постоянства мощности применительно к частотно-регулируемомуасинхронному электроприводу переменного тока,Система управления выполнена повертикальному принципу. Генераторразвертывающего пилообразного напряжения устройства включает в свойсостав интегратор 1, связанный с пороговыми узлами 2 и 3, фиксирующимимоменты достижения напряжением интегратора 1 соответственно минимально 7 1554094 8го и максимального пороговых значений., Узел 3, в свою очередь, состоит из источника опорного порогового напряжения 4 и компаратора 5, Выход узла 3 непосредственно, а блока 25 через дизъюнктор 6 подключены соответственно к К- и Б-входам триггера 7, выход которого присоединен к коммутатору полярности напряжения 8, определяющему ход формирования выходной кривой интегратора 1, Выходной пилообразный сигнал интегратора 1 поступает на вход, основного компаратора 9 системы управления,Выходная частота преобразователя регулируется сигналом блока задания частоты 1 О (линейное увеличение частоты при росте сигнала блока 10), который .поступает на вход генерато ра тактовых импульсов 11, а также на входы порогового устройства 12 и функционального преобразователя 13. Источник опорного напряжения связан с минусовым входом сумматора 15 25 и, через ключи 16 и 17 и дизъюйктор 18, с вторым входом компаратора 9. На второй вход диэъюнктора 18 через ключ 19 поступает сигнал с выхода функционального преобразователя 13, Зр Управление ключами 17 и 19 осуществляется сигналами с прямого и инверсного выходов порогового узла 12, а управление двухпозиционным ключем 16 - выходным сигналом счетного триг 35 гера 20, присоединенного к выходу порогового узла 3, Выход генератора тактовых импульсов 11 присоединен к четырехразрядному регистру 21, прямой и инверсный выходы младшего раз р ряда которого связаны соответственно с тактовым входом триггера 7 и с дизъюнктором 6. Выходы трех старших разрядов регистра 21 подключены к соответствующим входам логического 45 распределителя управляющих импульсов 22. Считается, что амплитуды сигналов блоков 1 и 10 Б, и Уо согласованы по уровню, т.е, Цм с=Ъмакс,На фиг, 3 и 4 приведены временные 5 р диаграммы, иллюстрируюшие работу системы управления инвертором в диапазонах пониженных и повышенных выходных частот на 1/6 части периода, на фиг, 5 построены кривые, поясняющие ,ход процессов в системе для диапазо. на пятикратного связанного изменения частоты и величины напряжения преобразователя, Индексы сигналов, обозначенных на, фиг. 3-5, соответствуют номерам соответствующих узлов и блоков устройства на структурной схеме, изображенной на фиг, 2. Развертывающее пилообразное напряжение 11 интегратора 1 синхронизировано тактовыми импульсами с выходов младшего разряда регистра 21, принимающего за период выходной частоты инвертора 12 состояний, которые в цифровой форме записи могут быть последовательно выражены как 000 1001, 0010, 0011, 000, 0001, 1010, 1011, 1100, 101,1110, 111, В компараторе 9 осуществляется на первой части диапазона регулирования сопоставление сигнала развертки с напряжением блока 13, которое производится. вплоть до частотыЗИ 15Р 1=Ра = - Р , которая фиксируется пороговым блоком 12, его пороговое напряжение, выраженное в долях от начального значения Бщ , при этом рав Зо . 15но пс 7 11 юиач 7 1 о щ, . В системе при мом осуществляется двухсторонняя модуляция фронтов импульсовуправления.Функциональный преобразователь 13реализует заранее рассчитанную дляконкретного И зависимость между выходной частотой Р (сигналом П о ) ипродолжительностями импульсов управления, Выходной сигнал Б 1 для И=5построен на фиг, 5.При Р ) Р после раэмыкания ключа19 и замыкания ключа 17, напряжениеБ сравнивается, как показано нафиг. 4, на крайних частях тактовыхинтервалов с выходным сигналом 11сумматора 15, а в центре тактовыхинтервалов, при единичных состояниях счетного триггера 20, с напряжением 114 источника 14, Амплитуда сигнала 04 при этом находится иэ выраже 1 Нния НН = 3 1 юмакс= 3 11 онач Увеличениечастоты сопровождается при этом форсированным ростом напряжения 0 (кривая со стрелками на фиг, 4, а такжехарактеристика увеличения У нафиг. 5) при неизменной амплитуде0,4, что достаточно быстро, при достижении.выходной частотой значенийЗИР) Р= - . Ро =ЗР, приводит к тому, что амплитуда сигнала 0 на центральном участке тактового интервала ста1554094 10новится меньше текущих значений Б, . Одновременно сигнал У начинает превышать амплитуду Б, . На выходе компаратора 9 при Б,) Б формируется единичный сигнал и соответственно нулевой сигнал при У,101. При этом единичному выходному сигналу компаратора 9 соответствует интервал формирования импульсов кривой выходного напряжения инвертора, поэтому при ГГ в полуволне линейного выходнойго напряжения формируется по три импульса неизменной длительности, . продолжительность паузы между которыми уменьшается с ростом выходной части и достигает нулевого значения на номинальной выходной частоте Р=1 Ро 5 Р 0 ф Таким образом, форсированный сдвиг середин импульсов управления к центру тактовых интервалов,осуществляемый при управлении по предложенному способу в диапазоне частот 31 Р 311 Р,-- Г ( -позволяет обсспе- .7 5чить внутри тактовых интервалов ускоренное сближение двух сигналов управления при повышении выходной частоты и слияние их в один сигнал наЗЩчастоте Р = -- . При этом на верх 5нем частотном диапазоне работы преЗИГобразователя при Р ) в -о количеств 5 Уво коммутаций основных вентилей силовой схемы преобразователя уменьшается примерно в два раза, что при"водит к соответствующему уменьшениюпотерь на коммутацию. Сокращается5также диапазон работы преобразователя при уменьшенных значениях межкоммутационных интервалов, что повьппает,надежность работы преобразовательнойсистемы в целом,10формула изобретенияСпособ управления трехфазным регулируемым мостовым инвертором поавт, св, Р 1492434, о т л и ч а ющ и й с я тем, что, с целью снижения потерь и увеличения надежностиработы инвертора на повьшенных выходных частотах в диапазоне частот отЗМ ЗИР = - Г до Г =Р местоположе 75 ония середин сигналов выключения ивключения вентилей на участках 6090 эл. град. и 240-270 эл. град, определяют соответственно из функцио 78325нальных зависимостей С =( - - -717 БРо 2043--- ) элград. и С =( --7 Р1 7117 М 1:---- -) эл. град, на участках 907 Г120 эл. град. и 270-300 эл. град,местоположения середин других сигналов определяют симметрично, а начастотах Р ) Р в середине тактовыхинтервалов формируют сигнал управления с продолжительностью Я , определяемой иэ функциональной зависимостиеещ6 Р ба/Х оставитель О.Парфенова ехред А.Кравчук актор И,Сегляник Подписное изобретениям и открытиям при ГКНТ СС 5, Раушская наб., д, 4/5
СмотретьЗаявка
4369557, 01.02.1988
ОТДЕЛ ЭНЕРГЕТИЧЕСКОЙ КИБЕРНЕТИКИ АН МССР
ОЛЕЩУК ВАЛЕНТИН ИГОРЕВИЧ
МПК / Метки
МПК: H02M 7/48
Метки: инвертором, мостовым, регулируемым, трехфазным
Опубликовано: 30.03.1990
Код ссылки
<a href="https://patents.su/7-1554094-sposob-upravleniya-trekhfaznym-reguliruemym-mostovym-invertorom.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления трехфазным регулируемым мостовым инвертором</a>
Устройство для преобразования серий импульсов во временные интервалы

Номер патента: 653742
Опубликовано: 25.03.1979
МПК: H03K 13/20
Метки: временные, импульсов, интервалы, преобразования, серий
...обоих ячеек сдвигового регистра появляется потенциал логического О, в нулевое состояние приходят счетчики текущего и опорного числа.Первым импульсом из серии устанавливается в единичное состояние первая ячейка сдвигового регистра 1 (момент 1,) и открывает первую схему И 2, через которую на вход счетчика 3 опорного числа начинают поступать импульсы высокой частоты от генератора тактовых импульсов. Вторым импульсом из серии устанавливается в единичное состояние вторая ячейка сдвигового регистра 1 (1) и поступление импульсов на вход счетчика опорного числа 3 прекращается, так как первая схема И 2 сигналом с Я- выхода второй ячейки закрывается. ь 1 исло импульсов ГТИ, поступившее на вход счетчика опорного числа 3, пропорционально пе 5 10...
Устройство для преобразования серий импульсов во временные интервалы

Номер патента: 892712
Опубликовано: 23.12.1981
Авторы: Бойчук, Кужелюк, Осыка
МПК: H03K 13/20
Метки: временные, импульсов, интервалы, преобразования, серий
...триггера 1, входы блока 10ЪЧ соединены с выходами счетчиков 6,7,а выход - со входом сброса триггера 4, входы блока 9 соединены свыходами счетчиков 7,8, а выход -с входом сброса блока 5.ЭО Устройство работает следующим об"разом.В исходном состоянии устройства(фиг.цепи установки в исходноесостояние не показаны) триггерыЭ 1-4, блок 5 и счетчик 6 находятся внулевом состоянии, а счетчик 8 -в состоянии просчитанной единицы.Первым импульсом серии, поступающейна шину 12, триггер 1 перебрасывает, ся в единичное состояние и разрешает счет счетчикам 6 и 8, Тактовыеимпульсы частотой Го с шины 1 поступают на счетные входы триггера 3и счетчика 6. На выходе триггера 34 Формируются импульсы с частотой=Я 3, которые поступают на счетные входы...
Анализатор последовательности посылок с переменным тактовым интервалом
Номер патента: 1314931
Опубликовано: 27.01.1995
Автор: Манякин
МПК: H04Q 5/16
Метки: анализатор, интервалом, переменным, последовательности, посылок, тактовым
АНАЛИЗАТОР ПОСЛЕДОВАТЕЛЬНОСТИ ПОСЫЛОК С ПЕРЕМЕННЫМ ТАКТОВЫМ ИНТЕРВАЛОМ, содержащий регистр сдвига, сумматор, блок стробирования, ключ, делитель частоты, выделитель фронта импульса, причем выходы регистра сдвига соединены соответственно с входами сумматора, дополнительный вход которого соединен с входом выделителя фронта импульса, выход которого соединен с первым входом делителя частоты, отличающийся тем, что, с целью повышения помехоустойчивости, в него введены триггер, делитель с переменным коэффициентом деления, блок установки, элемент ИЛИ, таймер, вход которого соединен с выходом блока стробирования, первый вход которого соединен с выходом сумматора, второй вход блока стробирования соединен с первым входом регистра сдвига, первым входом...
Генератор серий импульсов с регулируемыми интервалами внутри серий

Номер патента: 263661
Опубликовано: 01.01.1970
МПК: H03K 3/84
Метки: внутри, генератор, импульсов, интервалами, регулируемыми, серий
...мультивибратор 3 ти инм устлельно на схеотороймуль- сигнае устройство нутри серии, ло запрещаеть интервала,предазом. руемыт гене ое устс регуПредмет изобретения нератор серий импульсо интервалами внутри се улируемы- держащий 30 и Изобретение нике, в части пульсов. Известны ге полненные, на содержащие н менным коэф чивающее ре внутри серии генератора пе Однако в и пульсов с ин ствует возмо прещенных имлируемой длительностью импульса и схему запрета 4,Генератор формирует серии с заданной периодичностью и числом импульсов в серии. К выходу генератора параллельно подключены накопительное устройство и схема запрета, причем выход накопительного устройства соединен со входом ждущего мультивибратора, а выход последнего - со входом схемы...
Формирователь однополосных сигналов
Номер патента: 1385236
Опубликовано: 30.03.1988
Авторы: Данич, Лукьянец, Сальников, Хахалкин
МПК: H03C 1/52
Метки: однополосных, сигналов, формирователь
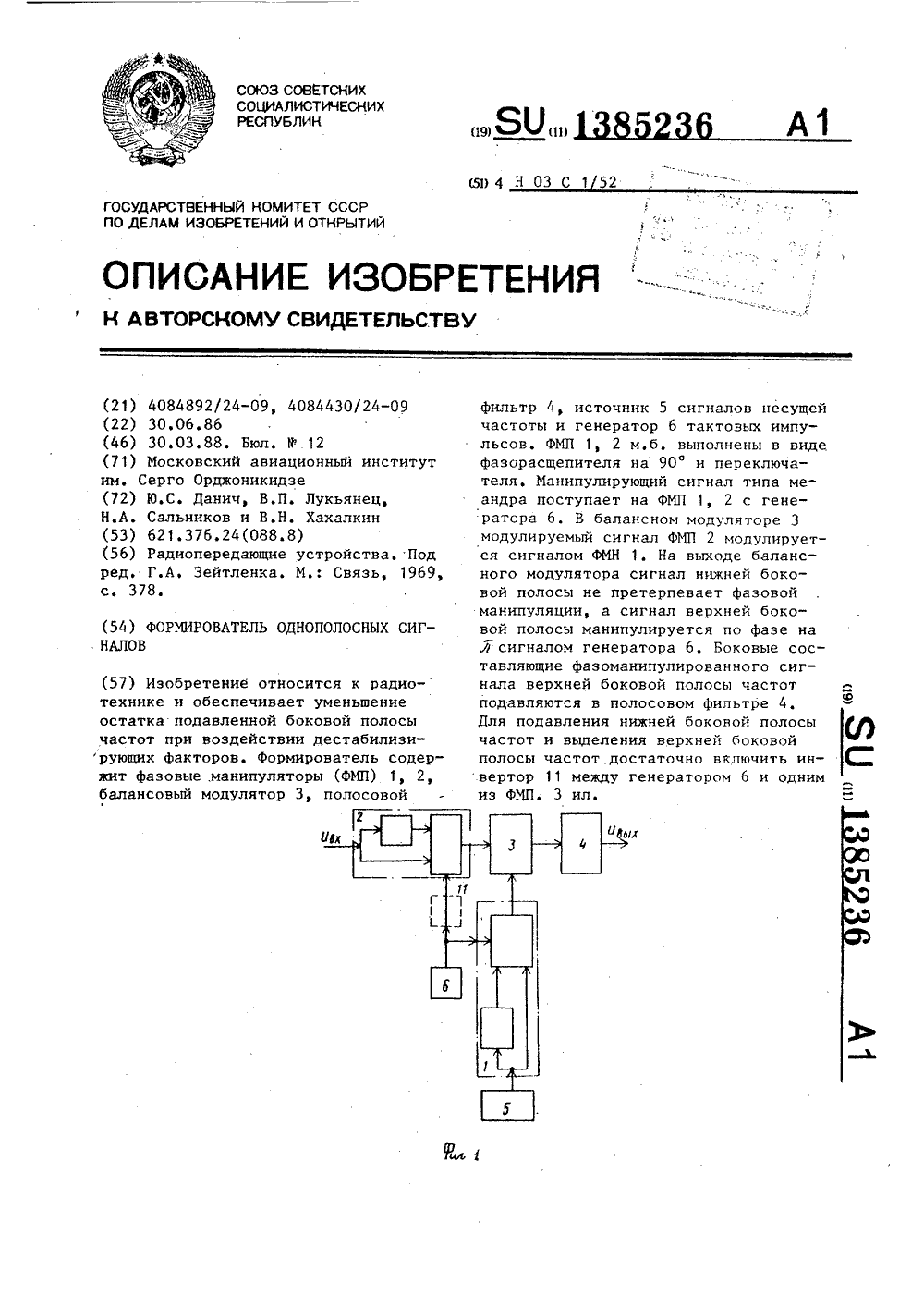
...частот не проходит на выходформирователя однополосных сигналов.Если требуется выделить верхнююбоковую полосу частот и подавить нижнюю, то для этого достаточно междувыходом генератора 6 и входом манипулирующего сигнала одного из фазовых 15манипуляторов 1 и 2 включить инвертор11 (фиг. 1).На фиг. За показан спектр сигналана выходе балансного модулятора 3 приотключенном генераторе 6 тактовых импульсов, на фиг. Зб - спектр сигналана выходе балансного модулятора 3 привключенном генераторе 3.Пунктиром показана амплитудно-частотная характеристика полосовогофильтра Е и Е - соответственно ниф н Ьжняя и верхняя боковые частоты,В частном случае выполнения формирователя однополосных сигналов, показанном на фиг. 2, формирование однаполосного сигнала...
Предыдущий патент: Устройство для широтно-импульсного управления тиристорным преобразователем частоты
Следующий патент: Тяговый преобразователь постоянного напряжения в трехфазное переменное
Случайный патент: Устройство для калибровки датчиков импульсного давления