Способ управления гистерезисным электродвигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
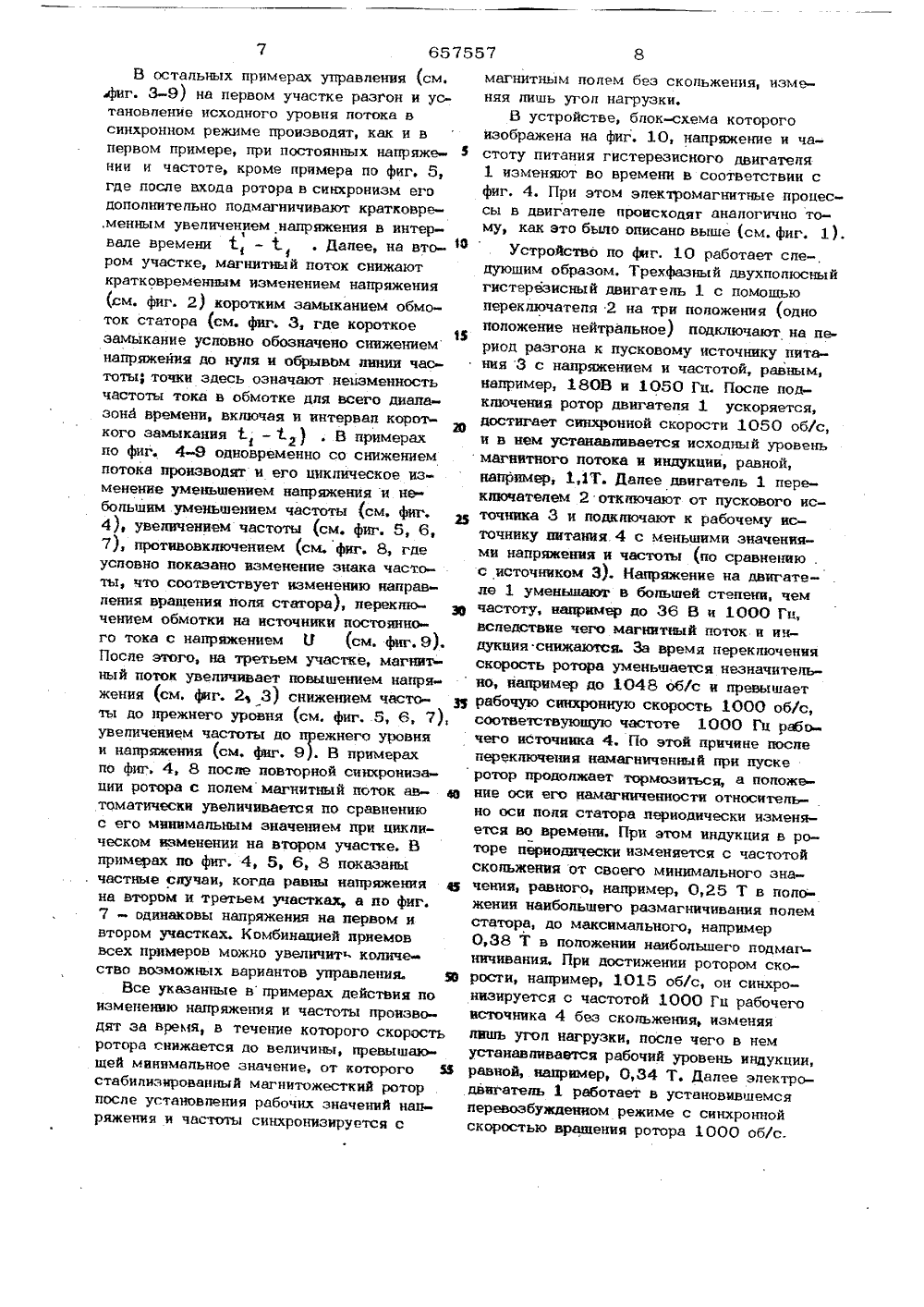
)рпи 657557 Союз СоветскихСоциалистическихРеспублик АВТОР СК 1) Дополнительное к авт22) Заявлено 09,06.75 (21 присоединением заявки ид(51) М. Кл.Н 02 Р 5/34 Н 02 Р 1/20 022/24-0 ГОс/дэфстВВнный Окатит СССР в ладам кзИрове н втквмткй,04.79 Дата опубликования саки 72) Авторы изобретения. И. Гуров, В. И. Нагайпев,виА онд осковский 71) Заявитель а Ленина энергетичес институт 4) СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИС ЭЛЕКТРОДВИГАТЕЛЕМ к электропривсстерезисного тротехники, а именн лектрических машин ти зобретение относится к области Известен способ перевозбуждения" гистерезисного электродвигателя путем его кратковременного отключения от источника питания1. Электродвигатель отключают на такое время, что после его повторного включения ось намагниченности магнитожесткого ротора оказывается повернутой относительно оси синхронно- вращающегося магнитного поля статора на угол, зависящий от длительности времени отключенного режима, Скорость же ротора за время отключенного режима снижается до величины, превыщаюшей минимальное значение, от которого после повторного включения ротор синхронизируется с магнитным полем без скольжения, изменяя лищь угол нагрузки, Вследствие этого магнитожесткий ротор сохраняет дополнительную намагниченность, приобретенную от амплитудного значения тока при переходном электромагнитном пропессе после повторного включения, а электродвигатель сохраняет перевозбуждение",Для гистерезисных электродвигателей преимущественно с форсированным разгоном, когда вращающие моменты при разгоне и в рабочем режиме отличаются более чем в 10 раз, известен способ управления, включающий частичное размагничи; ванне магнитожесткого ротора убывающим переменным относительно него магнитным полем 21 . Частичное размагничивание производят перед снижением магнитного потока в синхронном режиме, Этот спо соб наиболее близок к предложенному способу по технической сущности и дости гаемому эффекту.При кратковременных динамических перегрузках, действующих на ротор, качаниях ротора, колебании момента сопротив пения нагрузки, величины, частоты и фазы напряжения питания и прбчих переходных режимах. имеет место гистерезис и пестабипьность электромеханических характеристик электродвигателя. Это являетсяследствием отсутствия стабилизации магнитного состояния ротора при управлениигистерезисным электродвигателем. При Уопределенном уровне этих изменений ротор размагничивается, электродвигательтеряет перевозбуждение" и, если в новом состоянии его максимальный синхронный момент меньще момента сопротивле- фния, ротор выходит из синхронизма, чтотребует повторной. синхронизации и "перевозбуждения". Осуществляя частичноеразмагничивание ротора убывающим переменным полем, кроме того, снижают и фмаксимальный синхронный момент элекъ.родвигвтеля в "перевоэбужденном режимеиэ-за уменьщения коэрцитивной сипы ротора, что ограничивает уровень снижениямагнитного потока, а, следовательно, иуровень повыщения КПД,Белью изобретения является повыщениестабильности электромехвнических характеристик и КПД гистерезисного эпектродвигатепя эа счет ствбипизации магнитногосостояния ротора.Постввпенная цепь. достигается тем,что в способе управпения гистерезиснымэлектродвигателем, вкпючающем подсоеди 30нение электродвигателя к источнику, ус-,тайовпение исходного уровня магнитногоцотокв и поспедуюшее его снижение отисходного уровня в синхронном режиме,магнитный поток вначапе снижают в сщ 3хронном режиме от исходного уровня доуровня, меньще рабочего, а затем вновьувепичивают и синхронном режиме, устанавпивая рабочий уровень магнитного потока, а также тем, что перед установкойрабочего уровня магнитного потока производят его цикпическое изменение вблизиэтого уровня.Изобретение поясняется чертежами.Фиг. 1 илгпострирует сушество физическихпроцессов; на фиг. 2-9 даны конкретныепримеры регулирования напряжения и частоты по предпагаемому способу; на фиг.10, 11 показаны примеры устройств, реализующих предпагаемый способ.На фвг. 1 изображена упрощенная диаграмма изменения магнитного состоянияротора гистерезисного электродвигателяпри регулировании его магнитного потокапо прототипу и по данному изобретению.По оси ординат отложена индукция В, а пооси абсцисс - напряжещюсть Н в роторе,характеризующие при конкретной геометрииэлектродвигатепя соответственно магнитщэГЙ пОтОк и нймйгничиваюшую сицу и связанныо с напряжением, частотой и тг- ком. Магнитное состояние ротора и синхронном режиме для просгогы на пиагрвмме в разные моменты времени представлено одной точкой с максимапьной индукцией. Пунктиром показана Основная кривая намагничивания ротора. Пусть после входа ротора в синхронизм его магнитное состо ние характеризуется верщиной петли гнстерезиса а. Исходный уровень магнитной индукции равен В, , а напряженности - НПри перевозбуждении" по прототипу магнитный поток снижается до рабочего УРОВНЯ И тоЧКа МВРНИТНОГО СОСГОЯНИЯ СМЕвв щвется по нисходящей ветви нетли а, Если рабочая индукция равна В, в напряженность Н 2, когда магнитное состояние находится в точк пересечения нисходящей ветви и кривой О, характеризующей внешнюю по отношению к ротору магнитную цепь, реактивный ток электродвигателя близок к нулю, коэффициент мощности - к единице, а КПД - к своему максимапьному значению. Максимальный синхронный момент электродвигателя при индукции В приближенно.пропорционален площади, ограниченной осью абсцисс, параллельной ей линией е на уровне В и нисходящей и восходящей ветвями петли гистереэиса а. При случайном снижении индукции в синхронном режиме, например, из-за снижения. напряжения питания, до В и поспедующем ее повыщении до прежнего уровня В = В магнитное состояние изменяет 2ся вначале от (В, Н ) до (В Н ) по нисходящей ветви петли а, а далее от (Вз, Н ) по восходящей ветви частот- ното цикпа й до положения (В Н ). В реэупьтате при В В Н = Н 2 вследствие чего изменяются электромеханические характеристики двигателя. Если частичное размагничивание ротора в прототипе производят до исходного уровня индукции в синхронном режиме В и напряженности Н 1, то процессы происходят на петле гистерезиса а аналогично описанным. По данному изобретению "перевозбуждение" производят не в один, а в два этапа. При этом магнитное, состояние принудительно выводят на частный цикп петли гистерезиса а. Точку отхода частного цикла, например точку (В, Н ) выбирают по ожидаемым копебаниям индукции и напряженности в роторе, В синхронном режиме индукцию понижают от В не доустанавливается при ии клическом изменении магнитной индукции возле рабочего1уровня В . Полцая стабилизация магнитных свойств происходит примерно на десятом цикле.Рассмотрим несколько конкретных примеров применения управления гистерезиснымэлектродвигателем по изобретению.На фиг. 2-9 по оси абсцисс отложено10время 1, нв оси ординат - частота Е инапряжение питания У элекгродвигагеля.Законы регулирования напряжения и частоты во времени содержат три характерных участка. Первый участок (в интервале времени от Йдо 1. )соответствуетразгону электродвигателя и установлениюисходного уровня магнитного потока всинхронном режиме, второй ( от 1 до)- снижению магнитного потока и для фиг,4-9 его циклическому изменению, а третий (после , ) - повышению магнитнойго потока до рабочего уровня и синхронизации ротора с рабочей частотой литани ягВ первом примере (см, фиг. 2) гистерезнсный электродвигатель с неподвижнымротором в момент времениподключают к источнику переменного така, нап ример, с напряжением 380 В и частной50 Гц. На первом участке, в интервалевремени, ротор разгоняется,входит в сйнхройизм и к моменту времени . в цем устанавливается исходныйщ уровень индукции, равной например 11 Т.Далее, в момент времени 11электродвигатель переключают на напряжение, например, 73 В той же частоты 50 Гц,,вследствие чего индукция в роторе пони 4 о жается от 1,1 Т до 0,37 Т. Под пониженным напряжением электродвигатель выдерживают в течение времени от г- до .(второй участок), длительность которого е- равна, например, длительности пяти перио 4 дов напрякения, т.е. 0;1 с, За это времяротор в силу своей инерционности, например, сохраняет скорость неизменной, поворачиваясь на пять оборотов, В моментвремениэлектродвигатель переключаютИ с напрюкения 73 В на напряжение 127 Б,увеличивая тем самым индукцию в ротореот 0,37 Т до например, 0,5 Т. Послемомента времени(третий участок)электродвигатель прй напряжении 127 В Я синхроннзируется и устанавливается ра-бочий "перевозбуждецный" ражим, цаприВ, а до В , после чего ее вновь увеличивают до рабочего уровня. Рабочую точку целесообразно выбрать, как и ранее, ца кривой , т.э. точку (Б, Н ), где восходюдая ветвь частного цикла 2 пересекается с кривой б, В результате после выполнения указанных действий при случайном снижении индукции в синхронном режиме до Б и последующем ее повышении до прежнего рабочего уровня В 5 магнитное состояние изменяется вначале по нисходящей, а затем по восходящей ветви частного цикла ъ, В итоге магнитное состояние вновь возвращается в точку (Б , Н ) и электромеханические характеристики электродвигателя сохраняются на прежнем уровне. При случайном увеличении индукции выле В, например до В, и последующем ее снижении до прежнего уровня В = В нестабильУность характеристик обусловлена лищь несовпадением восходящей и нисходящей ветвей частного цикла 3, Процессы на частных циклах петли гистерезиса р более линейны, чем на ее нисхОдящей ветви. Поэтому при выполнении действий по данному изобретению и наложению рабочей точки на частном цикле а (Б , Н ) характеристики электродвигателя более стабильны в сравнении с прототипом.Прн форсированном разгоне, когда пусковой момент более чем в 5-10 раз прьвыщает момент сопротивления нагрузки, целесообразно понизить индукцию в синхронном режиме от Б не до В з , а до В, после чего увеличить В . На фиг. 1 показан случай, когда рабочая точка ротора располагается в (Б , Н ) для обоих, случаев управления ( по данйому изобретению и по прототипу). При равенстве КПД управление по данному изобретению имеет следующие преимушества. Во-первых, характеристики электродвигат ля более стабильны (рабочая точка находится на частном цикле петли а, а не на нисходящей ветви петли е ), и, во-вто/рых, электродвигатель при индукции В развивает больший максимальный синхронный момент (плошадь, ограниченная осью абсцисс, параллельной ей линией д и ветвями петли а больше площади, ограниченной той же осью и линией и ветвями петли а ). Увеличение момента может быть использовано для большего снижения индукции в сравнении с В , а следовательно, и для больщего повышения КПД.На фиг. 1 для примера показан стабилизированный частный цикл е, который мер, с чисто активным потребляемым током и коэффициентом мощности, равным единице.7 6575В остальных примерах управленим (см. фиг. 3-9) на первом участке разгон и установление исходного уровня потока и синхронном режиме производят, как и в первом примере, при постоянных напряже- З нии и частоте, кроме примера по фиг. 5, где после входа ротора в синхронизм его дополнительно подмагничивают кратковре,менным увеличением напряжения в интер 1вале времени 1 - 1 Далее, на вто- ф ром участке, магнитный поток снижают кратковременным изменением напряжения (см. фиг. 2) коротким замыканием обмоток статора (см. фиг. 3, где короткое замыкание условно обозначено снижениемИ напряжейия до нуля и обрывом линии частоты; точки здесь означают неизменность частоты тока в обмотке для всего диапазона времени, включая и интервал корота кого замыкания Е - 1 ) . В примерах по фиг. 4-9 одновременно со снижением потока производят и его циклическое иэ менение уменьшением напряжения и небольшим уменьщением частоты (см. фиг, 4), увеличением частоты (см. фиг. 5, 6, 7), противовключением (см. фиг. 8, где условно показано изменение знака частоты, что соответствует изменению направления вращения поля статора), переключением обмотки на источники постоянного тока с напряжением О (см. фиг.9), После этого на третьем участкеу магнитф ный поток увеличивает повышением напря" жения (см. фиг. 2 3) снижением частоты до прежнего уровня (см, фиг. 5, 6, 7), увеличением частоты до прежнего уровни и напряжения (см. Фиг. 9). В примерах по фиг. 4, 8 после повторной синхрониза ции ротора с полем магнитный поток ав- щ томатически увеличивается по сравнению с его минимальным значением при циклическом изменении на втором участке. В примерах по фиг, 4, 5, 6, 8 показаны , частные случаи, когда равны напряжения у на втором и третьем участках, а цо фиг.7 - одинаковы напряжения на первом и втором участках. Комбинацией приемов всех примеров можно увеличит. количество возможных вариантов управления. щВсе указанные в примерах действия поизменению напряжения и частоты производят за время, в течение которого скоростьротора снижается до величины, превышающей минимальное значение, от которого Истабилизированный магнитожесткий роторпосле установления рабочих значений напряжения и частоты синхронизируется с магнитным полем без скольжения, изменяя лищь угол нагрузки,В устройстве, блок-схема которогоизображена на фиг, 10, напряжение и частоту питания гистерезисного двигателя1 изменяют во времени в соответствии сфиг. 4. При этом электромагнитные процессы в двигателе происходят аналогично тому, как это было описано выше (см. фнг. 1).Устройство по фиг, 10 работает следуюшим образом. Трехфазный двухполюсныйгистерезисный двигатель 1 с помощьюпереключателя 2 на три положения (одноположение нейтральное) подключают на период разгона к пусковому источнику питания 3 с напряжением и частотой, равным,например, 18 ОВ и 1050 Гц. После подключения ротор двигателя 1 ускоряется,достигает синхронной скорости 1050 об/с,и в нем устанавливается исходный уровеньмагнитного потока и индукции, равной,нзпримяэ 1 г 1 Тэ Далее двигатель 1 перекпючателем 2 отключают от пускового источника 3 и подключают к рабочему источнику питания 4 с меньшими значениями напряжения и частоты (по сравнению .с источником 3). Напряжение на двигателе 1 уменьшают в больщей степени, чемчастоту, например до 36 В и 1000 Гц,вследствие чего магнитный ноток и индукция снижаются. За время переключенияскорость ротора уменьщается незначитеано, например до 1048 об/с и превыщаетрабочую синхронную скорость 1000 об/с,соответствующую частоте 1000 Гц рабочего источника 4. По этой причине послепереключения намагниченный при пускеротор продолжает тормозиться, а положение оси его намагниченности относительно оси поля статора периодически изменяется во времени. При этом индукция в роторе периодически изменяется с частотойскольжения от своего минимального значения, равного, например, 0,25 Т в попожении наибольщего размагничивания полемстатора, до максимального, например0,38 Т в положении наибольшего лодмагничивания, При достижении ротором скорости, например, 1015 об/с, он синхронизируется с частотой 1000 Гц рабочегоисточника 4 без скольжения, изменяялищь угол нагрузки, после чего в немустанавливается рабочий уровень индукции,равной, например, 0,34 Т. Далее электродвигатель 1 работает в установившемсяперевозбужденном режиме с синхроннойскоростью вращения ротора 1000 об/с.воде инерционных механизмов с относительно малым временем разгона (торможения), когда по условиям разгона (торможения) пусковой (тормозной) момент 3 электродвигателя более чем в 5-10 раэпревыщает необходимый момент в установившемся рабочем режиме. На фиг. 11 приведена блок-схема устройства, реализующего предложенный способ управления с регулированием напряжения во времени по фиг. 2 (частота питания постоянна). Это устройство содержит обычные для автономного электропривода элементы. Гистерезисный двигатель ГД подключен к источнику питания ИП через регулятор напряжения РН и инвертор И. Работой РН управляет программноео устройство ПУ по сигналу с устройства контроля синхронной скорости УКСС, например, включенного на вход И.Устройство по фиг. 11 работает следующим образом. При включении ГД его скорость равна нулю и сигнал на выходе УКСС отсутствует. С РН через И на ГД подается повышенный исходный уровень напряжения и происходит форсированный разгон ГД. При входе ГД в синхрониэм на ф выходе.УКСС поюляется сигнал и ПУ, РН и И отрабатывают программу изменения напряжения на ГД в синхронном режиме; вначале напряжение снижается до промежуточного уровня, а затем повыщается до25 рабочего уровня. При отработке программы ротор удерживается в синхрониэме эа счет инерции вращающихся частей и собстьенного вращающего момента, Минимальное время работы ГД при промежуточном уровне напряжения не менее двух периодов частоты питания. После отработки программы ГД работает в перевозбужденном режиме.Изобретение может найти применение преимущественно в синхронном элекхропри 33 Формула изобретения 1. Способ управления гистерезиснымэлектродвигателем путем воздействия ноцепи питания якоря, включающий снижение магнитного потока в синхронном режиме от исходного уровня до рабочегоуровня, о т л и ч а ю щ и й с я тем, что,с целью повышения стабильности электрсьмеханических характеристик, магнитныйпоток вначале снижают в синхронном режиме от исходного уровня до уровня, меньще рабочего, а затем вновь увеличиваютв синхронном режиме, устанавливая рабочий уровень магнитного потока,2.Способпоп, 1, отличающ и й с я тем, что перед установкой рабочего .уровня магнитного потока производят его циклическое изменение вблизи этого уровняИсточники информации, принктые вовнимание при экспертизе1. Авторское свидетельство СССР% 103937, кп, Н 02 К, 19/08, 1956.2. Авторское свидетельство СССРМ 439882,кп. Н 02 К, 19/08, 1974.657557 багз г.6 Фиг.иСоставитещ. В. КузнецоваТехред О. Андрейко Корректор В,едактор Н. Каменская иян аз 1820/5 1130 Филиал ППП "Гатент, г. Ужгород, ул. Проектная, 4 Тираж 856 ПИ Государственного к по делам изобретений и , Москва, З-Э 5, Раушс Поддисиоемитетв СССРоткрытийая иаб., д. 4/5
СмотретьЗаявка
2167022, 09.06.1975
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ГУРОВ ГЕННАДИЙ ИВАНОВИЧ, НАГАЙЦЕВ ВАЛЕРИЙ ИВАНОВИЧ, ОРЛОВ ИГОРЬ НИКОЛАЕВИЧ, БОНДАРЬ АЛЕКСЕЙ СТЕПАНОВИЧ
МПК / Метки
МПК: H02P 5/34
Метки: гистерезисным, электродвигателем
Опубликовано: 15.04.1979
Код ссылки
<a href="https://patents.su/6-657557-sposob-upravleniya-gisterezisnym-ehlektrodvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления гистерезисным электродвигателем</a>
Способ регулирования скорости вращения ротора возбужденного синхронного агрегата

Номер патента: 1387100
Опубликовано: 07.04.1988
Авторы: Бурунова, Лотков, Фадеев
МПК: H02J 3/40
Метки: агрегата, возбужденного, вращения, ротора, синхронного, скорости
...а только в переходном процессе. При использовании быстродействующего устройства синхронизации, определяющего 15 угол опережения в темпе процесса регулирования с учетом скорости и ускорения движения агрегата, в процессе изменения скольжения в зонах, допустимых для включения и допустимых для включения малых скольжений, возможно включение агрегата в сеть.Если агрегат находится в зонахдопустимых для включения малых скольжений, и параметры относительного 25 движения роторов синхронизируемых агрегатов благоприятные для возникновения условий для синхронизации в течение небольшого времени (Аиг,2), в течение 10-20 с (время ожидания) ни каких действий не производят, проверяют, произошла ли синхронизация. Если по прошествии 10 - 20 с...
Устройство для измерения тока ротора бесщеточной синхронной машины

Номер патента: 712769
Опубликовано: 30.01.1980
Авторы: Амбросов, Бирюков, Исьемин
МПК: G01R 19/00
Метки: бесщеточной, ротора, синхронной
...быть применены измерительный прибор, суммирующий орган устройства защиты от коротких замыканий во вращающемся полупроводниковом выпрямителе и т. п.Для снижения влияния высших гармонических ЭДС на качество выходного сигнала, а также для повышения уровня сигнала, на выходе выпрямителя 6 может быть установлен сглаживающий фильтр Э.При использовании в качест=е исполнительного элемента измерительного прибора первоначальную настройку устройства для измерения тока ротора бесщеточной синхронной машины производятся следующим образом.С помощью вспомогательного токосьемника измеряются действительное значение тока возбуждения ротора синхронной машины. При определенном воздушном зазоре (например, между торцом сердечника 2 измерительной катушки 1...
Система охлаждения ротора электрической синхронной машины

Номер патента: 138998
Опубликовано: 01.01.1961
Авторы: Домбровский, Дубинин, Еремеев, Иванов, Каплан, Левчук, Орлов, Пинский, Филиппов, Школьник
МПК: H02K 9/16
Метки: охлаждения, ротора, синхронной, электрической
...и ч а юща я ся тем, что, с целью повышения интенсивности и охлаждения и равномерности распределения газа по каналам катушек, промежутки между полюсами полностью или частично перекрыты по периферии и образуют полости, в которые из радиальных каналов ротора подается газ, проходящий затем через указанные поперечные каналы в зазоры между сердечниками полюсов и катушками и выбрасываемый в зазор между ротором и статором через: каналы в сердечниках полюсов.2. Система охлаждения по п. 1, отличающаяся тем, что, с целью дальнейшего повышения равномерности распределения газа по каналам катушек, зазоры между катушками и сердечниками имеют переменное сечение, увеличивающееся по направлению к периферии ротора.3. Система охлаждения по пп, 1 и 2, о т...
Ротор бесконтактной синхронной машины

Номер патента: 199960
Опубликовано: 01.01.1967
МПК: H02K 21/02
Метки: бесконтактной, ротор, синхронной
...машины.Целью настоящего изобретения является обеспечение минимальной величины потоков рассеяния между полюсными системами при максимально возможных площадях входных сечений ротора на пути магнитного потока.Согласно изобретению ротор бесконтактной синхронной машины состоит из двух полюсных когтеобразных систем, укрепленных на магнитном валу, часть которого в промежутке между полюсными системами выполнена из немагнитной вставки, скрепленной с другими его частями, например, посредством сварки.На чертеже схвматически изображен описываемый ротор. ротор бесконтактной сии содержит две полюсные ког мы 1 и 2, укрепленные на Немагнитная вставка 4 расежутке между полюснымп лена с другпмп частями магедством, например, сварки. женныи шины систе...
Полюс ротора явнополюсной синхронной электрической машины

Номер патента: 245882
Опубликовано: 01.01.1969
Авторы: Пинский, Филатов, Фомичев, Фролов
МПК: H02K 3/52
Метки: полюс, ротора, синхронной, электрической, явнополюсной
...немагнитных прокладок может служить, например, нем агнитная сталь. ения ссея- про 1 редмет изобретен Полюс рот электрическо из магнитног 25 прокладками сердечника и ния обмотки что, с целью нем агнитные 30 лены в продсер ыи пол ения 1, ла и н ертеже показан предлагаеводержит обмотку возбужд2 из магнитного материпрокладки 3. дечнинити Изобретение относится к области электромашиностроения, в частности к креплению обмотки возбуждения ротора явнополюсной синхронной м ашины.Во избежание выворачивания обмотки возбуждения, располагаемой на полюсах, под деиствием центробежных сил удлиняют полюсиые наконечники так, чтобы центр катушки находился под наконечником, либо применяют держателц обмотки возбуждения, которые крепятся к ободу ротора, или...
Предыдущий патент: Способ регулирования вентильного электропривода постоянного тока
Следующий патент: Устройство управления электроприводом переменного тока
Случайный патент: Устройство для приема и передачи дельта-модулированного сигнала