Многопроцессная линия гальванопокрытий
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1770461
Автор: Храмов






Текст
(56) Авторское свидетелМ. 1585396, кл, С 25 О 2 для переоснащения цехов галь тий и печатных плат. Гальванич содержит накопитель 5, распол один ряд с ваннами 1 гальванич и обслуживаемый одним автоо причем каждая позиция накоп держит декодирующее устройст действующее с кодировщиками Информация с декодирующих у рез адаптеры 10 поступает на л 11, соединенную с бортовым ко 4, что обеспечивает передачу ин состоянии накопителя 5 в бор роллер 4, 3 ил,ство СССР(57) Использование; галтности автоматическиемногопроцессорные лимой загрузкой из накоп АЯ ЛИНИЯ ГА ьванотехника, в часи автооператорные нии с нерегулируеителя, применяемые 4 4 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ОМУ СВИДЕТЕПЬСТВУ ванопокрыеская линия оженный в еской линии ператором, ителя 5 соВо, взаимо- подвесок 7, стройств чеинию связи нтроллером формации о товой контИзобретение относится к гальванотехнике и предназначено для обработки деталей в линии по разным технологическим маршрутам без предварительно созданной очереди,Наиболее близкой к изобретению по технической сущности является многопроцессорная линия гальванопокрытий, содержащая гальванические ванны, транспортный робот с декодирующим устройством и датчиком позицирования, соединенными с контроллером программного управления транспортным роботом, накопитель с датчиками кода на каждой позиции, соединенными с входом моделирующего устройства, выход которого соединен с входом контроллера,В этой линии при наличии подвески на позиции накопителя соответствующий датчик кода вырабатывает кодированный сигнал, содержащий информацию о технологическом маршруте, по которому подвеска должна следовать в линии, передающуюся на моделирующее устройство. Последнее в соответствии с заданной программой определяет последовательность запуска подвесок в обработку с учетом заранее рассчитанного времени протекания каждого маршрута в линии. Вызов транспортного робота на соответствующую позицию накопителя может произойти при условии окончания какого-либо технологического маршрута и переноса соответствующей подвески на позицию демонтажа,Тем самым последующая загрузка в линию очередной подвески происходит не по фактической готовности линии принять подвеску для обработки, а с задержкой по времени, соответствующей разнице времени фактической готовности линии и временем ее загрузки. Этому способствует отсутствие обратной связи между системой управления транспортным роботом и моделирующим устройством,Сумма задержек при загрузке подвесок в линию составляет значительную потерю производительности, так как расчетное время прохождения технологического маршрута в линию завышается за счет учета возможных непредвиденных обстоятельств, которые могут увеличить реальное время прохождения технологического маршрута в линии.Цель изобретения - повышение производительности линии.В предлагаемой гальванической многопроцессорной линии бортовой контроллер вычисляет время возможности запуска в линию нового технологического маршрута еще до окончания текущего и демонтажа 5 10 15 20 25 30 35 40 45 55 подвески, исходя из реального состояниялинии, Тем самым сокращается время между очередными загрузками и повышаетсяпроизводительность линии,Моделирующее устройство, представляющее собой специализированный илиуниверсальный вычислитель, исключается,Его функции передаются бортовому контроллеру, в котором наращивается объем памяти, Кроме того, исключено декодирующееустройство на транспортном роботе.Бортовой контроллер соединен линиейсвязи (возможно той же, что и в прототипе),с каждым адаптером, один из выходов которого соединен с соответствующим входомпоследующего, а другой выход последнегоадаптера соединен с соответствующимивходами каждого адаптера, причем параллельные входы всех адаптеров соединены свыходами датчиков кода соответствующихпозиций накопителя,Для повышения помехоэащищенностив качестве линии передачи данных можетбыть использован инфракрасный канал, Вэтом случае система передачи данных дополняется приемопередатчиками инфракрасного излучения,На фиг. 1 показана структурная схемапредлагаемой линии; на фиг. 2. 3 - вариантыэлектрических схем адаптера и датчика кода,Линия содержит гальванические ванны1, транспортный робот 2, с датчиком позиционирования 3 и бортовым контроллером4. накопитель 5, позиции 6 накопителя, подвески 7 и перестраиваемыми кодировщиками. датчики кода 8 накопителя,позиционирующие устройства 9 на гальванических ванных и позициях накопителя,адаптеры 10 и линию связи 11.В предлагаемой линии ходовые пути (нафиг, 1 не указаны для упрощения) служатдля перемещения транспортногс роботавдоль гальванических ванн 1 и накопителя5, На транспортном роботе 2 размещен бортовой контроллер 4, угравляющий механизмами транспортного робота, и датчикпозиционирования 3, ответные части которого закреплены у каждой гальваническойванны 1 и позиции 6 накопителя,Бортовой контроллер 4 соединен линией связи 11 с выходами всех адаптеров10, В свою очередь, другие входы (м огоразрядные) соединены с выходами соответствующих датчиков кода 8, расположенных накаждой позиции накопителя и взаимодействующих с кодированными пластинами подвесок. Каждая позиция накопителя 5 игальванические ванны 1 имеют позционирующие устройства 9, взаимодействующие10 15 20 25 30 35 40 45 50 55 с датчиком кода 3 транспортного робота 2, Адаптеры 10 могут быть расположены на каждой позиции накопителя.Линия работает следующим образом. В исходном состоянии при незагруженных ваннах 1 транспортный робот 2 находится на любой из позиции линии. Накопитель 5, содержащий и подвесок на позициях 6, загружен произвольно (может быть загружен неполностью). При включении бортовой контроллер 4 вырабатывает и посылает в линию связи 11 пачку импульсов, число которых равно числу разрядов датчика кода 8 накопителя. На каждой позиции 6 накопителя, содержащей подвеску, датчик кода 8 вырабатывает сигнал в виде 8-разрядного параллельного кода, который поступает на входы соответствующих адаптеров 10.Первый адаптер 10, на который поступает пачка импульсов из линии связи 11, вырабатывает и посылает в линию связи 11 содержащееся в адаптере 10 разрядное слово в последовательном коде, На каждый импульс, поступающий с бортового контроллера 4, следует задержанная во времени посылка с адаптера в виде нуля или единицы. Сообщение из линии связи принимается бортовым контроллером, причем посылки, им формируемые, служат синхронизирующими сигналами. Сообщение декодируется. заносится в ОЗУ контроллера, Для большей достоверности посылка может быть повторена.Выходные сигналы адаптера блокируют его вход.После окончания первой посылки первый адаптер блокируется и следующая посылка поступает на вход второго адаптера, где все вышеописанные действия повторяются. После окончания работы последнего адаптера с его выхода и на все адаптеры поступает сигнал, деблокирующий адаптеры, что делает их готовыми к новому циклу работы,Полученная бортовым контроллером информация обрабатывается по заданному алгоритму, и выбирается оптимальная последовательность загрузки подвесок в линию.Транспортный робот 2 перемещается к накопителю 5, останавливается у выбранной очередной позиции б, которую идентифицирует с помощью датчика позиционирования 3, забирает подвеску 7 и перемещает ее в соответствующую гальваническую ванну 1.Таким образом, в обработку загружаются все возможные по расчету подвески, Когда появляется возможность загрузки в обработку какого-либо нового технологического маршрута, бортовой контроллер 4 аналогично описанному выше опрашивает адаптеры 10 накопителя 5.Полученная информация анализируется, и, если в накопителе 5 содержится подвеска 7, которая может быть запущена в обработку, транспортный робот 2 переносит ее в соответствующую по маршруту ванну 1, Если накопитель 5 не содержит подвески с соответствующим технологическим маршрутом, опрос адаптеров 10 периодически повторяется до определения подвески с подходящим технологическим марш рутом.Алгоритм загрузки может быть скорректирован так, что загружаться будет неоптимальный для данной ситуации маршрут, тем самым исключается возможность переноса обработки какого-либо маршрута на неопределенное время,Датчики кода 8 накопителя, расположенные на позициях 6 накопителя, представляют собой, например, инфракрасные приемопередатчики типа датчика позиционирования 3, на набор пластин. кодирующий информацию. расположен на подвесках 7.Пластинами набирается код. содержащий информацию о технологическом маршруте данной подвески. Код может быть изменен для любого конкретного маршрута,Система позиционирования состоит из датчика позиционирования 3, закрепленного на транспортном роботе 2, и позиционирующих устройств 9, расположенных на ваннах 1 и позициях накопителя 6.Датчик 3 может представлять собой ряд инфракрасных приемопередатчиков. сгруппированных попарно, взаимодействующих с позиционирующими устройствами, закрепленными, например, на гальванических ваннах и позициях накопителя. Позиционирующие устройства представляют собой набор пластин. которые перекрывают световой поток соответствующей пары приемник-передатчик при передвижении транспортного робота. Кодирование производится, например, в двоичном коде. Максимальное число пластин и, соответственно. пар приемопередатчиков соответствует суммарному числу ванн и позиций накопителя.На фиг. 2 представлен один из вариантов схемы адаптера.Перемычки а, Ь и е, 1 соответствуют пер вому в последовательной цепочке адаптеров. Перемычки Ьс и Ю соответствуют всем последующим адаптерам, 1770461Входы Хо-Хт мультиплексора 007 соединяются с выходами соответствующихдатчиков кода накопителя.При включении питания по выходу 4 поступает последовательность сигналов низкого уровня, которые инвертируются на 003.1 и поступают на В-входы триггеров 002 и 004 и счетчика 006, устанавливая их в исходное состояние.При этом адаптер, стоящий в цепочке первым, открыт по входу 8 001,1 сигналом высокого уровня с 002,1, а остальные адаптеры в последовательной цепочке закрыты по этому входу низким уровнем с 1 002.1.С линии передачи на вход 1 поступает первый и из пачки в 8 импульсов сигнал, через 001.1 и 001.2 он поступает на вход С 2 триггера 004.1, Триггер опрокидывается, низкий уровень с 2 004 поступает на вход Чо мультиплексора 007, и на выход 3 поступает сигнал, соответствующий состоянию входа Х, т,е, первому разряду слова, снимаемого с датчика кода, Сформированный на ВС-цепочке положительный импульс поступает на вход эмиттерного повторителя Ч ТЗ и с его выхода через диод Ч 02 поступает в линию. Одновременно инвертированный на 005,4 этот сигнал поступает на вход 2 001.1 и блокирует прохождение этого сигнала через 001,1. Высокий уровень с 1 001,1 поступает на О-вход триггера 004.2 и подготавливает его к приходу следующего импульса, который по входу С опрокидывает 004,2, на выходе 11 004,2 и входе 1 005,1 устанавливается высокий уровень, и второй импульс из пачки с выхода 10 001,2 через 005,2 поступает на вход 1 счетчика 006, а его спад заносит в счетчик "1". При этом в мультиплексоре 007 открывается канал Х 1, и если на Х 1 присутствует "1", то она, как описано выше, преобразуется в положительный импульс, поступающий в линию, После поступления 8-го импульса низкий уровень с 001.3 через инвертор 005.3 устанавливает по Я-входу 002,2 высокий уровень на 11 002.2 и низкий на 12 002.2,который через 003,2 сбрасывает в исходноесостояние счетчик 006 и триггер 004,Сигналом с 10 005,3 триггер 002.1 ус 5 танавливается в единичное состояние, исигнал с 2 02,1 блокирует прохождение сигнала из линии в первый адаптер.На вход 3 второго адаптера с выхода ЧТ 2 поступает сигнал высокого уровня и повходу 3 триггер 002.1 устанавливается вединичное состояние, открывая ключ 001,1и разрешая прохождение в схему следующих 8 импульсов. Работа второго адаптерапроисходит аналогично первому. Сигналокончания второй пачки поступает на Свход триггера 002.1, устанавливая его в нулевое положение, после чего второйадаптер блокируется по входу, а высокийуровень с выхода Ч Т 2 подготавливает к2 п работе 3-й адаптер,После окончания всего сообщения с выхода Ч Т 1 последнего адаптера на входы 2всех адаптеров поступает сигнал. устанавливающий их в исходное состояние,Формула изобретенияМногопроцессная линия гальванопокрытий, содержащая гальванические ванны,накопитель с позиционирующими устройствами и датчиками кода на каждой гозиции,подвески с перестраиваемыми кодировщиками, транспортный робот с бортовым контроллером и датчиком позиционирования,о т л и ч а ю щ а я с я тем, что, с цельюповышения производительности, она осна 35 щена адаптерами, каждый из которых установлен на соответствующей позициинакопителя, бортовой контроллер соединенс каждым адаптером, один из выходов которого соединен с соответствующим входомкаждого последующего, а другой выход последнего адаптера соединен с соответствующими входами всех адаптеров, причемпараллельные входы всех адаптеров соединены с выходами датчиков кода соответствующих позиций накопителя,,1 у: Ъ в Составитель Ю. ХрамТехред М,Моргентал едактор Г. Бельска рректор Э. Лончаков роизводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 аказ 3718 Тираж ВНИИПИ Государственного комитета по изо 113035, Москва, Ж, Рас, Подписноетениям и открытиям при ГКНТ СС ская наб., 4/5
СмотретьЗаявка
4877632, 01.08.1990
ЗАВОД ИМ. М. В. ФРУНЗЕ
ХРАМОВ ЮРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: C25D 21/12
Метки: гальванопокрытий, линия, многопроцессная
Опубликовано: 23.10.1992
Код ссылки
<a href="https://patents.su/6-1770461-mnogoprocessnaya-liniya-galvanopokrytijj.html" target="_blank" rel="follow" title="База патентов СССР">Многопроцессная линия гальванопокрытий</a>
Устройство для подвески проводов линии электропередачи

Номер патента: 424269
Опубликовано: 15.04.1974
Авторы: Гриценко, Малинов, Тихомиров
МПК: H02G 7/20
Метки: линии, подвески, проводов, электропередачи
...и Олповре)енно стялкпвя 51 предохранительную трубку в с)оропу про.1:1:1(я 1 О шей свой разворот ветви 2 гир,15111 лы. Полныйразворот ветви 2 завершдетс упором ес серьги 9 в противоположный коне 11 рдспорной трубки, предохраняющей ветви от ул,дрд и поврежде;пья изол;1 торов, после чсго обе ветви 25 совместно приппмдю 1 ыд себя остто 111 ос тжение фазы через трос.Для ляль 11 е 11 ц)его Ослдблеп 11 тжс 1111 1 юсле полного разворотд обеих ветвей гпрл нлы трос выбирают с соответству 1 О 1 ц)л пзбьтко)1 30 длины. При э)ом вторд по холу с 1 вь 2 п 1 р лянды долкна расцепляться с лодочкой 12 зажима 5 раньше своего предельного отклонения. После этого трос увлекается в сторону увода фазы лодочками обоих зажимов и занимает некоторое конечное...
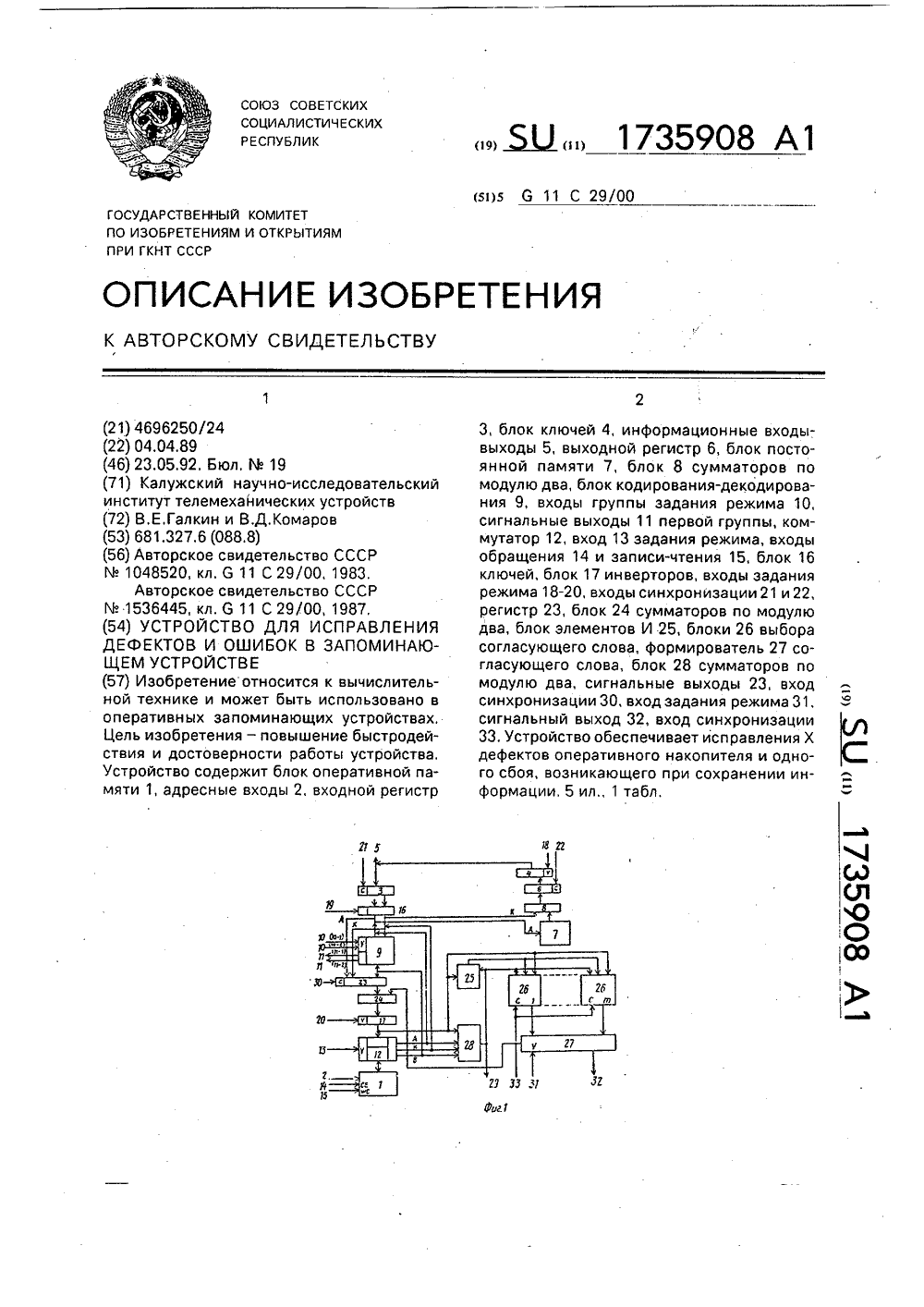
Устройство для исправления дефектов и ошибок в запоминающем устройстве
Номер патента: 1735908
Опубликовано: 23.05.1992
МПК: G11C 29/00
Метки: дефектов, запоминающем, исправления, ошибок, устройстве
...если код записываемой информации и код дефектов совпадает с согласующим словом, что показано на примере.При считывании информации с входа 2 в накопитель 1 поступает код адреса, На вход 14 поступает сигнал для считывания и информация с выходов накопителя 1 через коммутатор 12 ( на вход 13 поступает сигнал управления) поступает на входы блока 9 и записывается в него при поступлении соответствующих сигналов по входам 10, Затем на входы 10 поступают сигналы вывода с корректированной информации (исправляется один сбой, если он произошел при хранении информации в накопителе 1), Информация поступает на вторые входы блока 8 сумматоров по модулю два, а сигналы адресных информационных разрядов (А разрядов) поступают на адресные входы блока 7...
Стабилизированный преобразователь постоянного напряжения

Номер патента: 1702499
Опубликовано: 30.12.1991
Авторы: Райкова, Стуковнин, Хандогин
МПК: H02M 3/337
Метки: постоянного, стабилизированный
...отсчета интервала строго привязана к началу импульсов переключения синхронизируемого генератооа 16, т,е. длительность или фаза р и ропорциональна входному сигналу. Далее ИИМ-импульсы преобразуются в ждущем мультивибраторе 21 в импульсы, сооветствующие импульсам генератора 14 тактовых импульсов, Эти импульсы через распределитель 11 импульсов поступают на синхровходы синхронизируемого генератора 10, который ВырабатыВает прямоуГОльное напряжение типа "меа 1 др", сдвинутое по фазе на угол р по отношению к прямоугольному напряжению синхронизируемого генератора 16, Дополнительные транзисторы 8 и 9, Г 1 одключенные параллельно переключающим транзисторам 2 и 3, поочередно ОтКРЫВВЮТСЯ И ЭаКРЫВаютСЯ На ВРЕМЯ, Рааное полупериоду управляющего...
Устройство для подвески провода линии электропередачи

Номер патента: 1820437
Опубликовано: 07.06.1993
Авторы: Аспандияров, Гулевич, Мухамеджанов
МПК: H01B 17/44, H02G 7/00
Метки: линии, подвески, провода, электропередачи
...отрезка трубы 3, на ней и особенно на участке, где размещена дополнительная клемма 5 со шлейфом б, проявляется эффект магнитной эжекции электронного потока, вызывающий втягивание электронов,из которых состоит электрический ток, протекающий в разных направлениях во втулке 1 и стальном отрезке трубы 3. в глубинные слои стального Отрезка трубы 3, что исключает испарение электронов с поверхности трубы 3, исключая заряжение среды, ее иониэацию в зоне подсоединения шлейфа 6 с проводом фазы 2. Это и ведет к снижению вероятности образования короны, сни:кая тем самым потери электроэнергии, связанные с коронированием. Подключение устройства к гирлянде изоляторов 8, к. шлейфу б с помощью клемм 5 и 7 приводит к получению следующих дополнительнь 1 х...
Опора для подвески проводов линии электропередачи

Номер патента: 65425
Опубликовано: 01.01.1945
Автор: Лопатин
МПК: E04H 12/00
Метки: линии, опора, подвески, проводов, электропередачи
...которой остаются рожки Р 1. и ЕК для троса, Дг 475На фиг. 1 - 4 изображена промежуточная опора; однако та же схема принципиально остается и для анкерной, и для угловой опоры, причем в последнем случае точки А и Е или Р и В могут соединяться жестким стержнем или гибкой тягой.Опора может быть или деревянной или металлической. В первом случае не требуется каких-либо пояснений, так как устройство опоры возможно только из деревянных брусьев или же из круглого леса.Бо втором случае, т, е. когда для изготовления опоры предназначается металл, выгодная форма опоры наиболее часто будет требовать не :сплошных балок, а составных стержней типа сквозных колонн, четырехгранных или трехгранных; это относится ко всем стержням опоры АВ, Сй, В 0, ЕВ,...
Предыдущий патент: Способ измерения плотности тока в электролите
Следующий патент: Подвеска для нанесения гальванических покрытий
Случайный патент: Регулировочное приспособление к фидеру при стеклодельной машине