Способ автоматического регулирования формованием трубчатых строительных конструкций центрифугированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
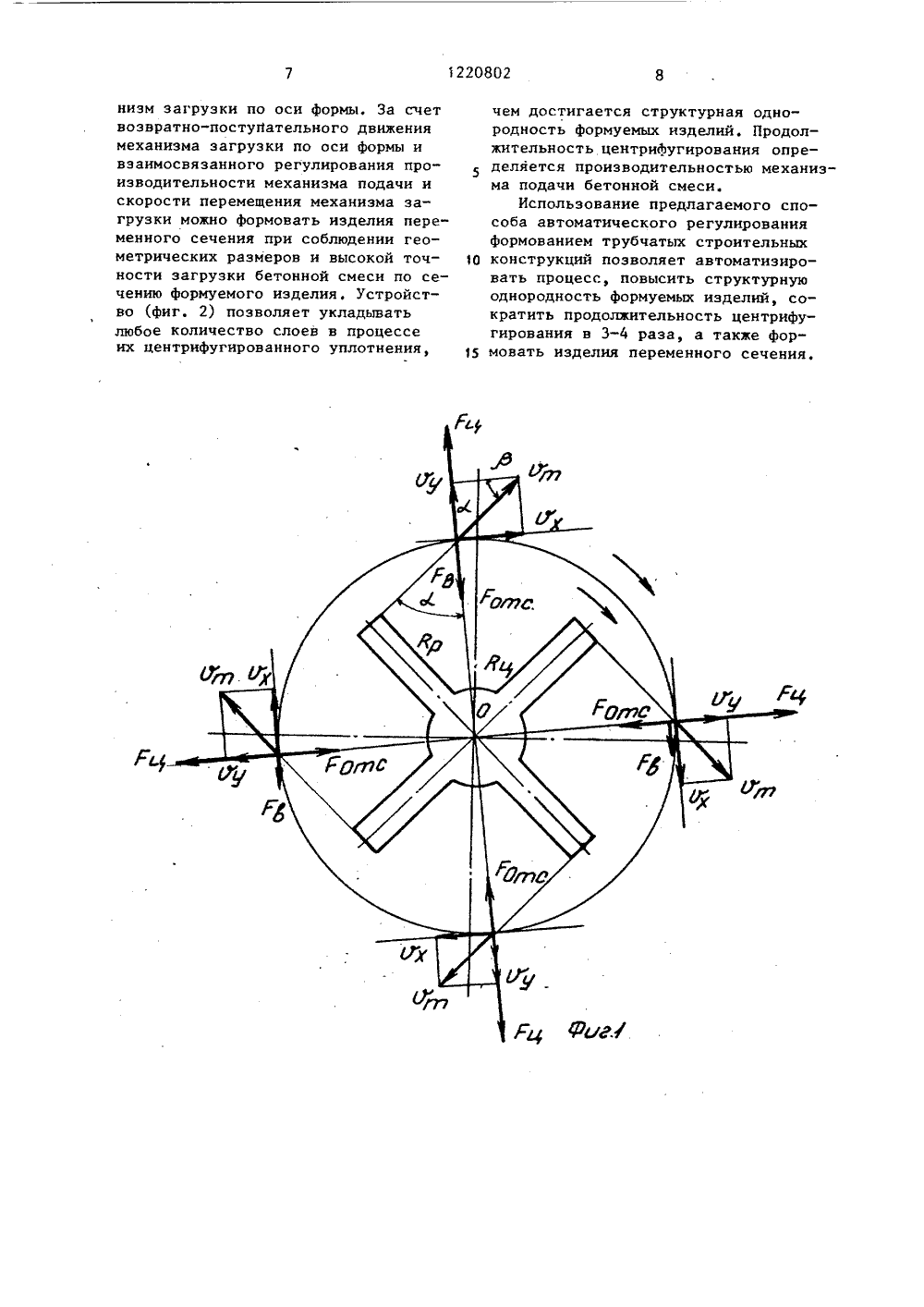
(2) Е - темп торможения,плотность бетонной смеси;Г(9)- поперечное сечение формуемого слоя иэделия в функции пути.2. Способ по п.1, о т л и ч а ю - щ и й с я тем, что измеряют угловые скорости вращения формы и роторного механизма разгона и подачи бетонной смеси и изменяют скорость Изобретение относится к строитель ству и может быть использовано для автоматического управления устройствами при формовании строительных изделий центрифугированием, укладки бетонной смеси и т.п.Цель изобретения - повьппение точности регулирования.На фиг, 1 представлена диаграмма скоростей и сил, действующих на компоненты бетонной смеси, в момент их соприкосновения и взаимодействия с вращающейся поверхностью формуемого изделия; на фиг. 2 - устройство для осуществления способа и Функциональная схема системы управления устройством.Устройство (фиг. 2) для центрифугированного формования изделий кольцевого сечения содержит формуцентрифугу 2, приводной двигатель 3 центрифуги, ротор 4, двигатель 5 вращения ротора, привод 6 перемещения механизма загрузки, включающий электродвигатель 7, редуктор 8, барабан 9, импульсный датчик 10 перемещения, телескопический бетоновод 1 1, гибкий бетоновод 12, механизм 13 изменения положения оси ротора, бетононасос 14, привод 15 бетононасоса, датчик 1 б производительности бетононасоса, весовые датчики 17, согдасующий блок 18, конечные выключатели 19, усилительно-преобразовательные блоки (УПБ) 20, 21 и 22, датчик 23 скорости вращения центрифуги, датчик 24 скорости вращения ротора 4, вычислительное устройство (ВУ) 25.Сущность способа заключается вследующем. вращения роторного механизма разгона и подачи бетонной смеси до достижения отношением угловых скоростейформы и роторного механизма разгонаи подачи бетонной смеси эталонногозначения, причем эталонное значение рассчитывают по формуле("а( и Р,где , и 8 Р - радиусы соответственно формуемого слоя и роторногомеханизма. Совмещение процесса послойной укладки бетонной смеси с центрифугированным ее уплотнением требует точного распределения бетонной смеси по сечению формируемого слоя в функции пути перемещения принудительно вращаемого роторного механизма по оси Формы, вовнутрь которого подается бетонная смесь, например, с помощью бетононасоса. В этом случае не может происходить распределение бетонной смеси эа счет ее пластических свойств, так как компоненты бетонной смеси после соприкосновения с вращающейся поверхностью формируемого изделия вовлекаются в процессе центрифугированного уплотнения, Точное распределение бетонной смеси важно при формовании изделий переменного сечения, а также традиционным способом при укладке ее на скорости распределения формы, так как сокращается продолжительность и повышается точность распределения бетонной смеси по сечению формы.Расчетная масса бетонной смеси, требуемая для формования слоя (изделия), может быть представлена в виде где Г (5) - поперечное сечение формуемого слоя в функциипути.Масса бетонной смеси, поступившая в форму за время й, может быть представлена в виде802 4Скорость перемещения механизма эагрузкн относительно формы изменяется в зависимости от Я и )Г(5). При достаточно высоких скоростях перемещания механизма загрузки при максимальной его производительности важное значение имеют вопросы точного позиционирования при переменных нагрузках на привод. Для точного позиционирования механизма без пере- регулирования в режиме торможения скорость перемещения должна изменять. ся с постоянным ускорением Ч = Ч-Е 6 ( Я - ускорение). Путь и скорость при Я =соччз 1 связаны зависимостью 1220 5= ЬМ 1,(4) где Я - производительность механизма загрузки бетонной смеси.Условием точного распределения бетонной смеси может быть где Ч - скорость относительного перемещения механизма загрузки и формы;- плотность бетонной смеси.Механизм подачи бетонной смеси (например, бетононасос) в начале процесса может быть представлен динамическим звеном с запаздыванием (время задержки случайная величина, зависимая от начального заполнения бетоновода, его геометрических размеров, производительности бетононасоса и т.п.), кроме того, могут иметь место разрывы непрерывности подачи смеси, пробки и т.п., поэтому в качестве задающего канала следует использовать канал управления приводом механизма загрузки бетонной смеси и формировать управляющее воздействие на привод перемещения механизма подачи бетонной смеси по оси формы в зависимости от производительности механизма загрузки.При изменении управляющих воздействий на привод перемещения органа подачи скачком, а также при других возмущающих воздействиях на приводы возникает нарушение отношения (3) в переходных режимах, что приводит к накоплению рассогласования по массе 5 М 5 Мрооо(5(.(Мо.оМо(щ( Г(5(Ч Дч 1(-. Повышение точности укладки бетонной смеси можно обеспечить за счет введения в управляющее воздействие на привод перемещения составляющей, пропорциональной рассогласованию по массе (4), т,е. интегральной составляющей от ьЯ, что ведет к повышению порядка астатиэма системы управления. Требуемую скорость перемещения механизма загрузки из соотношений (3), (4) можно представить в виде Ч(а о(5515( ЧЧ5555 (Я 40 45 50 55 Остаток массы смеси, требуемый длязаполнения формы, в функции остаткапути имеет вид ьМч - (О)Р ,(7)мгде К, = 2 Е ч (Б)Из выражения (7), следует, что для точного позиционирования механизма загрузки относительно формы при соблюдении условия (3) управляющее воздействие на привод механизма подачи бетонной смеси должно изменяться в квадратичной зависимости от остатка массы бетонной смеси, требуемой для укладки в форму и пропорционально толщине укладываемого слоя и ускорению Я При изменении задающего воздействия на привод перемещения механизма загрузки скачком (О , ),а также при других возмущающих воздействиях ввиду инерционности механизма скорость его перемещения скачком измениться не может, что приводит к нарушению условия (3), т.е. неравномерной укладке смеси.Повысить точность укладки смеси по сечению изделия можно эа счет взаимосвязного регулирования приводов механизма подачи бетонной смеси и перемещения механизма загрузки по оси формы за счет введения в контур регулирования привода механизма подачи составляющей управлякяцего воздействия, пропорциональной текущему рассогласованию по массе ьХс последующим охватом привода перемещения обратной связью по скорости. При этом повышается точность и быстродействие регулирования, так как одновременно регулируются обапривода в зависимости от рассогласования по массе ь Мз.Таким образом, для получения высокой точности укладки бетонной смеси по сечению формы при большой производительности механизма загрузки и достаточно высокой точности позиционирования управляющие воздействия на привод механизма подачи бетонной смеси следуег формировать в виде 10-К,КмъьМ + хьМэ (8) а на привод перемещения органа загрузки - в видедч (Ь а к 4 ьм) (9) 15 20 где К, К К, К - коэффициентыпропорциональности,При вращении роторного механизма,вовнутрь которого принудительно подается бетонная смесь (например, с помощью бетононасоса), материальныетела, образующие бетонную смесь,вовлекаются во вращательное движение и под действием центробежных силдвижутся к выходным отверстиям роторного механизма. После выхода иэ от 30верстий ротора компоненты бетоннойсмеси движутся к поверхности формируемого изделия по касательной кточке отрыва от ротора, В момент времени с , когда граница движущегосятела имеет хотя бы одну общую точкус поверхностью формуемого изделия,начинается ее взаимодействие с частицами поверхности. Вектор скорости-ъ40движения тела Ч в моментв точкеА (фиг. 1) можно разложить на двасоставляющих его вектора; У - вектор скорости тела по касательнойк точке А; Ч - вектор скорости тела,перпендикулярный касательной.Процесс взаимодействия материальных тел, обусловленный скоростью Чв первой фазе сопровождается уменьшением скорости 1 до нуля, так какш с ш . После этого возникает силаотталкйвания тела от поверхности,обусловленная упругим взаимодействием материальных тел. Часть импульсадвижущегося тела р = шЧрасхсдуетсяна пластические деформации, разрушение и сдвиг материальных частиц.Так как движущееся материальноетело взаимодействует с вращающейсяповерхностью формуемого изделия, то в момент сС на тело дейстовует центробежная сила.Допустим, что в момент сскорость движения тела равна линейной скорости точки на вращаЬщейся поверхности, т.е. Ч = Ч , тогда центробежную силу, действующую на тело, можно представить в виде(усПри небольших расстояниях точки отрыва тела от роторного механизма до поверхности в момент С скорость Чщ=Я Р, где и, Рр - .соответственно угловая скорость и радиус ротор- ного механизма.Из фиг. 1 следует, что 7 = Ч Бм= ЧР р / Р. а по условию букв Чус сд Й,рсгде бд, - угловая скорость формы.Таким образом,Ру с-сррпло д ф(11)И, 1Из соотношения (11) следует, что отношение угловых скоростей ротора и формы должно быть обратно пропорционально квадратам радиусов ротора и формуемого слоя.Сущность способа автоматического регулирования формованием строительных конструкций поясним с помощью устройства (фиг. 2) для его осуществленияПодготовленная форма 1 устанавливается на центрифугу 2 и разгоняется приводным двигателем 3 до скорости вращения я выше скорости распределения, Вычислительным устройством 25 рассчитывается согласно выражению (11) и задается на УПБ 21 уставка требуемой скорости вращения ротора 4, который перемещается приводом б по оси формы в начальное положение, контролируемое конечными выключателями 19, После разгона ротора 4 по команде ВУ 25 включается привод15 бетононасоса 14, который заполняет бетоновод 11. При получении сигнала датчика 16 производительностиВУ 25 по данным датчиков 16, 10, 17рассчитывает управляющие воздействиясогласно соотношениям (8), (9) и выдает на приводы 6 и 15. Привод б сзаданной скоростью перемещает механизм загрузки по оси формы. За счет возвратно-постуПательного движения механизма загрузки по оси формы и взаимосвязанного регулирования производительности механизма подачи и скорости перемещения механизма загрузки можно формовать изделия переменного сечения при соблюдении геометрических размеров и высокой точности загрузки бетонной смеси по сечению формуемого изделия. Устройство (фиг. 2) позволяет укладывать любое количество слоев в процеспроцессе их центрифугнрованного уплотнения,чем достигается структурная однородность формуемых изделий. Продолжительность центрифугирования определяется производительность жуанизма подачи бетонной смеси.Использование предлагаемого способа автоматического регулированияформованием трубчатых строительных 10 конструкций позволяет автоматизировать процесс, повысить структурнуюоднородность формуемых изделий, сократить продолжительность центрифугирования в 3-4 раза, а также фор мовать изделия перемени ого сечения,/5. ал ППП "Патент", г. Ужгород, ул. Проектная,Тираж 555 ВНИИПИ Государственного ком по делам изобретений и от 113035, Москва, Ж, Раушска
СмотретьЗаявка
3748206, 01.06.1984
БЕЛОРУССКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ОРГАНИЗАЦИИ И УПРАВЛЕНИЯ СТРОИТЕЛЬСТВОМ
ПИЛИПЕЙКО ЛЕОНИД ГРИГОРЬЕВИЧ, ТАМКОВИЧ АЛЕКСАНДР ИГНАТЬЕВИЧ, ШПАК МИХАИЛ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B28B 21/00
Метки: конструкций, строительных, трубчатых, формованием, центрифугированием
Опубликовано: 30.03.1986
Код ссылки
<a href="https://patents.su/6-1220802-sposob-avtomaticheskogo-regulirovaniya-formovaniem-trubchatykh-stroitelnykh-konstrukcijj-centrifugirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического регулирования формованием трубчатых строительных конструкций центрифугированием</a>
Формующий механизм пресс-автомата для изготовления изделий из бетонных смесей

Номер патента: 1156910
Опубликовано: 23.05.1985
Авторы: Андрианова, Васин, Хаимов, Ченцов, Шиманович
МПК: B28B 7/02
Метки: бетонных, механизм, пресс-автомата, смесей, формующий
...рычагов, одни из плеч каждой изрь; которых контактируют с соответств кшим (1 орх 0- образующим элементом, а лругис: лси соединены друг с другом посредством силового цилиндра. На фиг. 1 схематицио изобрежсн формующий механизм пресс-автоматы, обший вид; на фиг. 2 - разрез Л-.( нз фи: 1: из фиг. 3 . разрез В-Ь на фиг 2): из фи. 4 разрез В-В на фиг. 1ФормующиЙ 153 ехене(зе состо)11 из пузп - сона 1, вьшолненного со сквозными (ГВсрстиями 2, связанными с камерой 3 лля 3 рох ежуточного накопления влаги, имеюшеи трубопровод 4 и выпускной патрубок 5. Пуансон 1 жестко закреплен на подштампопои и.ите 6 пресс-зетОматя, перемещаемой к; изирявля;ощим стойкам 7 гидроцилиндром 8, закреилсиным на верхней опорной или г( 9, сне ениеЕой ири помощи...
Кассетная форма для изготовления блоков тоннельной обделки из бетонных смесей

Номер патента: 1405990
Опубликовано: 30.06.1988
Авторы: Губенков, Лапшин, Малоян, Петров, Скормин
МПК: B28B 7/24
Метки: бетонных, блоков, кассетная, обделки, смесей, тоннельной, форма
...для заглушенных с одной стороны трубок 8. В эти трубки монтируются направляющие штыри для точной фиксации перегородок, Для уве личения жесткости формы наружная обечайка 1 выполнена с ребрами жесткости 9. Поддон 2 может быть выполнен из частей и монтироваться на кольцевой иеразрезной платформе 10Процесс формования в кассетной форме для изготовления изделий иэ бетонных смесей происходит следующим образом.40Перед формованием производят сборку формы, для чего на платформу 10устанавливают поддон 2, на который в местах расположения торцов бетонирушмых блоков тоннельной обделки 45 устанавливают пластины перегородок 4 Таким образом, чтобы вертикальные .штыри 7 Фигурных болтов 6 вошли в проушины 5 примыкающих друг к другу пластин...
Форма для изготовления гидропрессованных напорных труб из бетонных смесей

Номер патента: 703333
Опубликовано: 15.12.1979
Авторы: Козлов, Пирожников, Хрипунов, Ционский
МПК: B28B 21/54
Метки: бетонных, гидропрессованных, напорных, смесей, труб, форма
...позволяя арматуреспирального каркаса расположиться по 5 кольцу большего диаметра.В зоне раструбного калибрующегокольца 7 напряжение арматуры спирального каркаса и образование внутреннейповерхностикалиброванной части раструба осуществляется за счет постоянной деформативности бетонной смеси.Положительный эффект от примененияформыновой конструкции достигаетсяэа счет исключения операций по нормализации внутреннего диаметра раструбной части трубы..4Формула изобретения раструбообразователю, причем диаметр его внутренней поверхности равен 1,25-1,3 диаметра раструбообразователя, а высота - соответствует длине рабочей части раструбообразователя.На чертеже показан общий вид формы для изготовления гидропрессованных напбрйых труб иэ бетонных...
Форма для изготовления трубчатых изделий из жестких бетонных смесей

Номер патента: 948681
Опубликовано: 07.08.1982
МПК: B28B 21/76
Метки: бетонных, жестких, смесей, трубчатых, форма
...формуемых трубчатых изделий. Фиксатор 7 представляет иэ себя жестко прикрепленные к полуформам 1 и 2 кронштейны 9, в которых установлена вертикальная поворотная ось 10, на которой жестко закрепленоверхний 11 и нижний 12 запорные диски. Посредством пальца 13 ось 10 соединена с рукояткой 14. Оба эапорные диска 11 и 12 имеют совйадающие по месту вырезы 15, ко торые соответствуют внутренней поверхности полуформ 1 и 2.Верхний запорный диск 11 выполнен с дополнительным вырезом 16, расположенным симметрично вырезу 15, причем для размещения дисков 11 и 12 в О полуформах 1 и 2 выполнены прорези 17.Работает Форма для изготовления трубчатых иэделий из жестких бетонных смесей следующим образом. 15Перед началом формования в Форму устанавливают...
Форма для изготовления центрифугированных напряженных трубчатых изделий из бетонных смесей

Номер патента: 1033339
Опубликовано: 07.08.1983
Авторы: Булавин, Валуевич, Остроух
МПК: B28B 21/80
Метки: бетонных, напряженных, смесей, трубчатых, форма, центрифугированных
...для изготовления центриугированных напряженных трубчатыхизделий из бетонных смесей, содержащей контактирующие друг. с другомполуформы и торцевые Фланцы с натяжными приспособлениями, .одна иэ полуформ снабжена реактивными тягами,закрепленными на ее внешней поверхности симметрично оси поперечногосечения.;На фиг. 1 схематически"изображенаФорма для изготовления центрифугированных трубчатых изделий из бетонныхсмесей, общий вид; на Фиг. 2 - разрез А-А на фиг. 1.Форма для изготовления центрифугированных трубчатых. изделий из бетонных смесей состоит из полуформ 1и 2, контактирующих друг с другомпродольными Фланцами 3, лежащими водной плоскости, Полуформы 1 и 2,соединены друг с другом посредствомзамков 4, причем на торцах полуформ 140и 2...
Предыдущий патент: Бетоноукладчик
Следующий патент: Устройство для изготовления трубчатых изделий из бетонных смесей
Случайный патент: Способ производства закваски сыра типа "чеддар