Способ автоматического управления процессом сортировки рыбы по видам и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 741839
Автор: Собченко

Текст
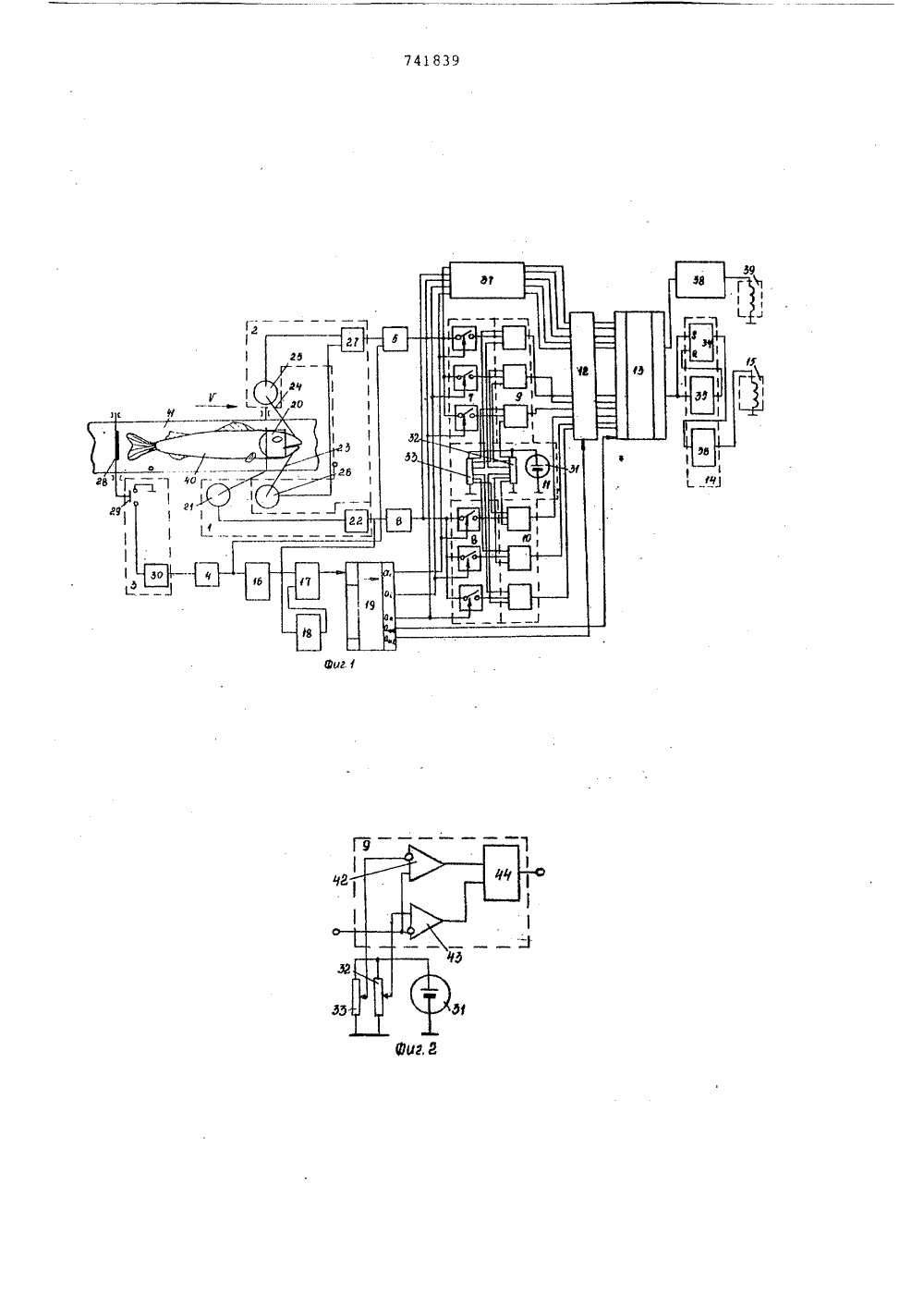
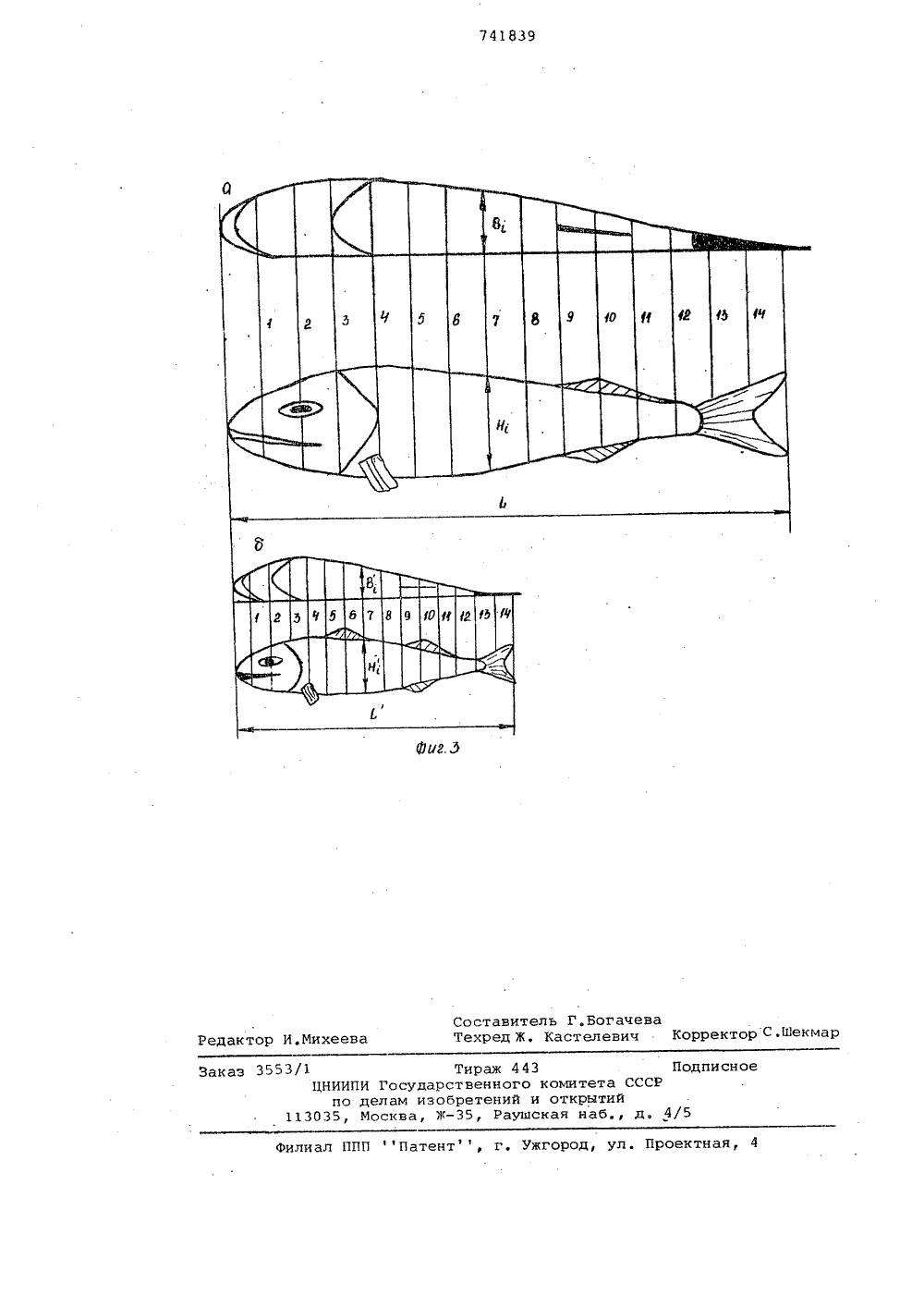
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(51)М. Кл.2 А 22 С 25/04 Государственный комитет СССР по делам изобретений и открытий(088.8) Дата опубликования описания 250680(72) Автор изобретения В.В.Собченко Дальневосточный ордена Трудового Красного Знамени политехнический институт им.В.В,Куйбышева(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. ПРОЦЕССОМ СОРТИРОВКИ РЫБЫ ПО ВИДАМ И УСТРОИСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Изобретение относится к механиза-.ции и автоматизации обработки рыбыи может быть использовано для автоматической сортировки рыбы по видам насудовых и береговых рыбообрабатывающих предприятиях.Известны способы для сортировкирыбы по видам, например по цвету,Этот способ состоит в определенииинтенсивности отраженного от поверхности рыбы светового потока определенной области спектра с последующейее коррекцией по размерам тела рыбыс целью исключения влияния на результаты .сортировки различной толщины 15рыбы 1,Однако этот способ имеет малую точность и надежность выполнения операции сортировки рыб, имеющих одина О ковую или почти одинаковую окраску.Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ сортировки рыбы по видам, предусматриваю щий пропускание электромагнитных волн, измерение толщины и длины рыбы, определение интенсивности падающего и отраженного от рыбы потока электромагнитных волн, нахождение соотношения длины рыбы к толщине и соотношения падающего и отраженного потоков, при этом результат сортировки по видам устанавливают в зависимости от результата сравнения соотношения потоков с заданным с коррекцией по соотношению длины рыбы к толщине 12,Этот способ позволяет производить сортировку рыб, близких по окраске.Способ осуществляют с помощью устройства для сортировки рыбы по видам, содержащего блоки определения длины и толщины рыбы, блоки определения интенсивности падающего и отраженного от рыбы потока электромагнитных волн, сравнивающий блок, блоки деления и Ьяок управления исполнительными механизмами. Недостаток данного способа состоит в том, что он поз вол яет произ водить сортировку только тех видов рыб, которые значительно отличаются друг от друга по строению тела и мышечных тканей, При сортировке видов рыб, близких по строению и размерам,.соотношения падающего и отраженного потока электромагнитных волн, а также соотношения длины рыбы к толщине отличаются незначительно, что приводит к ошибкам в выполнении операции сортировки рыб по видам,Цель изобретения - повышение точности сортировки рыбы по видам,указанная цель достигается тем,что в способе автоматического управления процессом сортировки рыб повидам, предусматривающем измерениетолщины и длины рыбы, измеряют высоту рыбы, определяют относительныекоординаты профиля рыбы по измереннымвеличинам и сравнивают их с заданнымзначением, а сортировку осуществляютпо результатам сравнения,Способ осуществляется с помощьюустройства для автоматического процесса сортировки рыбы по видам, содержащего блоки определения длины итолщины рыбы, сравнивающий блок, блоки деления и блок управления исполнительными механизмами, котороеснабжено блокомдля определения высо Оты рыбы, дополнительным сравнивающимблоком и распределителем импульсов,ВЫХОД ПОСЛЕДНЕГО ПРИ ПОМОЩИ КОНЬЮНКтора генератора и Формирователясоединен с блоком определения длинырыбы, при этом блоки определениядлины, толщины и высоты рыбь черезблоки деления и аналоговые ключисоеди 11 ены со входами сравнивающихблоков, выходы которых посредствомблока памяти и шифратора подключенык блоку управлени 51 испОлнительнымимеханизмами, а выход распределителяимпульсов связан с аналоговыми ключамии,35На фиг.1 изображена принципиальнаяблок-с,ема устройства для осуществления способа 1 на Фиг.2 - принципиальная схема элемента сравнивающего блока; на Фиг,3 - схема измерения координат профиля рыбы цо высоте и толщине 40устройство,цл 51 автоматической сОртировки рь.бы 11 о видам содержит датчик1 толщины рыбы, датчик 2 высоты рыбыи датчик 3 длины рыбы с заиоминающимэлементом 4 на выходе, причем датчик3 установлен от датчиков 1 и 2 нарасстоянии, равном максимальной длине сортируемой рыбы. К выходам датчиков 1 и 2 последовательно подключены блоки 5 и 6 деления, блоки 7 и 8аналоговых ключей, сравнивающие блоки 9 и 10 с блоком 1.1 эталонных сигналов, блок 12 памяти, шифратор 13и блок 14 управления исполнительныммеханизмом 15.К выходу запоминающего элемента4 подключен управляемый вентилятор 16импульсов, который обеспечивает линейное изменение частоты импульсов обратно пропорционально величине приложенного к его входу сигнала. С помощью щоконьюнктора 17 и нуль-органа 18 обеспечивается подача импульсов от генератора 16 на вход распределителя 19,Выходы распределителя а - а 1а а соединены со входами 65П 55и+ ключей блоков 7 и 8, с входом сброс а 1 блока 12 памяти и со стробирующим входом шифратора 13,Датчик 1 толщины рыбы включает измерительную шторку 20, связанную с косинусным преобразователем 21 угла поворота шторки 20 в электрический сигнал, выход которого подключен к вычислителю 22. Вычислитель 22 обеспечивает решение уравнения связывающего толщину рыбы В с величинами угла поворота шторки с и ее радиуса ВВ = й (1 - сов Ы ) и выдает на своем выходе сигнал, пропорциональный текущей толщине рыбы,Датчик 2 высоты рыбы аналогичен поконструкции датчику 1, но содержитдва измерительных рычага 23 и 24,два косинусных преобразователя 25 и26 и вычислитель 27, который на споемвыходе выдает сигнал, пропорциональный текущей высоте рыбы. Датчик 3длины рыбы содержит измерительнуюшторку 28, выключатель 29 контактногоили бесконтактного действия, подключенный к формирователю 30,Блок 11 заданных значений содержитисточник 31 эталонного сигнала, подключенный к резисторам 32 и 33, Изменением положения выводов сопротивлений можно менять величины эталонных сигналов, подаваемых в сравнивающие блоки 9 и 10, Блок 14 управленияисполнительным механизмом 15 содержит триггер 34, Б-вход которого ивход элемента 35 задержки подключенык выходу шифратора 13, а В-вход подключен к выходу элемента 35, Выходтриггера 34 через усилитель 36 соединен с соленоидом исполнительногомеханизма 15.Для увеличения числа сортируемыхвидов рыб устройство дополняетсяблоками 7,8,9,10 и 11 (на чертежевторая совокупность этих блоковобъединена и обозначена индексом37), блоком 38 управления исполнительным механизмом и исполнительныммеханизмом 39, Перемещение рыбы40 относительно датчиков и исполнительных механизмов осуществляетсяотранспортирующим органом 41.Каждый элемент блоков 9 и 10допускового контроля (фиг,2) содержит два компаратора 42 и 43, выходыкоторых подключены к коньюнктору 44.При этом входом элемента являетсяпрямой вход компаратора 42 и инверсный вход компаратора 43, а двадругих входа каждого из компараторов42 и 43 подключены к резисторам 32и 33, с помощью которых устанавливается нижний и верхний пределы срабатывания элементов сравнивающих блоков 9 и 10.Если сигнал на входе элементаотсутствует или его величина не пре/1 1и характеризуются малыми значениями 45 дисперсии, Причем значения величин, указанных относительных координат профиля, для одного вида рыбы значительно отличается от аналоговых величин рыб другого вида.50Коммутацию аналоговых ключей блоков 7 и 8 производят посредством распределителя 19 с частотой генера-. тора 16, благодаря чему количество дискретных значений координат высоты Н; и толщины В; рыбы, приведенных к ее длине, не будет зависеть от габарита измеряемой рыбы, т,е, съем информации о толщине и высоте рыбы будет происходить с подобных сечений, как для крупной, так и для мелкой рыбы. В сравнивающих блоках 9 и 10 производят сравнение приведенных дис вышает величины эталонного сигнала,снимаемого с резистора 33, то компа,ратор 43 находится в единичном состоя,нии, а компаратор 42 - в нулевом,в результате на выходе коньюнктора. 44 будет также нулевой сигналЕсливходной сигнал превышает величинуэталонного сигнала, снимаемого с резистора 33, но меньше величины сигнала, снимаемого с резистора 32, тооба компаратора 42 и 43 находятсяв единичном состоянии, что приводитк появлению единичного сигнала на выходе коньюнктора 44,И,наконец, когдавходной сигнал превышает по величинеэталонный сигнал, снимаемый с резистора 32, компаратор 43 переходитв нулевое состояние и на выходеконьюнктора 44 также будет нулевойсигнал. В результате элемент сравни,вающих блоков 9 и 10 срабатывает(выдает на своем выходе единичный 20сигнал) только в том случае, когдавеличина входного сигнала находитсяв зоне между эталонными сигналами,поступающими с блока 11,Процесс автоматической сортировки рыбы по видам осуществляется следующим образом.С помощью датчика 3 измеряют длинуЬ рыбы 40. В результате на выходезапоминающего элемента 4 устанавливается сигнал, пропорциональный длине измеряемой рыбы, а на выходе генератора 16 импульсов - сигнал с частотой, обратно пропорциональной длине рыбы, Затем с помощью датчиков 351 и 2 измеряют толщину В, и высотурыбы Н; (фиг,3), которые блоками5 и 6 деления приводят к относительным величинам в 1 и. В пределахвида рыбы и в подобных сечениях эти 40отношения не зависят от габарита кретных координат высоты и толщины сортируемой рыбы с заданными значениями, которые хранятся в блоке 11. Если совокупность относительных координат профиля сортируемой рыбы по высотеи толщине совпадает с совокупностью заданных значений, характеризующих определенный вид рыбы, то рыбу относят к данному виду, В этом случае в блок 12 памяти заносится совокупность единичных сигналов, и шифратор 13 при опросе его сигналом с распределителя 19 посылает единичный сигнал на блок 14 управления исполнительным механизмом. Исполнительный механизм 15, воздействуя на рыбу, направляет ее к требуемому технологическому органу (на чертеже не показан) . Если совокупность измеряемых координат профиля сортируемой рыбы не совпадает с заданной совокупностью значений, то рыбу считают неопознанной и отправляют, например, в бункер отходов (на чертеже не показан) .Формула изобретения1. Способ автоматического управления процессом сортировки рыбы повидам, предусматривающий измерениетолщины и длины рыбы, о т л и ч а ющ и й с я тем, что, с целью повышения точности сортировки, измеряютвысоту рыбы, определяют относительныекоординаты профиля рыбы по измеренным величинам и сравнивают их с заданным значением, а сортировку осуществляют по результатам сравнения.2. Устройство для осуществленияспособа по п.1, включающее блокиопределения длины и толщины рыбы,сравнивающий блок, блоки деленияи блок управления исполнительнымимеханизмами, о т л и ч а ю щ е е с я.тем, что оно снабжено блоком дляопределения высоты рыбы, дополнительным сравнивающим блоком и распределителем импульсов, выход последнегопри помощи коньюнктора, генератораи Формирователя соединен с блокомопределения длины рыбы, при этом блоки определения длины, толщины и высоты рыбы через блоки деления и аналоговые ключи соединены со входами сравнивающих блоков, выходы которых посредством блока памяти и шифратораподключены к блоку управления исполнительными механизмами, а выход распределителя импульсов связан с аналоговыми ключами,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9327401, кл, С 01 И 21/22, 1972.2. Авторское свидетельство СССР9514598, кл. А 22 С 25/04, 1976.741839 ставитель Г,Богачевахред Ж, Кастелевич Корректор С.шекм тор И.Михеева каз 3553 4/ Филиал ППП Патент, г. Ужгород, ул. Проектная, 4 тираж ИПИ Государственн о делам изобретенМосква, Ж, Р 443 Подписиго комитета СССРй и открытийушская наб д. 5
СмотретьЗаявка
2586393, 01.03.1978
ДАЛЬНЕВОСТОЧНЫЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
СОБЧЕНКО ВАЛЕНТИН ВАЛЕНТИНОВИЧ
МПК / Метки
МПК: A22C 25/04
Метки: видам, процессом, рыбы, сортировки
Опубликовано: 25.06.1980
Код ссылки
<a href="https://patents.su/5-741839-sposob-avtomaticheskogo-upravleniya-processom-sortirovki-ryby-po-vidam-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического управления процессом сортировки рыбы по видам и устройство для его осуществления</a>
Устройство для сортировки рыбы по длине

Номер патента: 109449
Опубликовано: 01.01.1957
Автор: Кореньков
МПК: A22C 25/04, B07B 13/05
Метки: длине, рыбы, сортировки
...для ры гцие транспортеры 2.Сортировочный механизм состоит из горизонтальных, параллельно расположенных шнекс,в 3, уст новленных поперек нотою рыбы. Шнеки имеют синхронное врашение и одинаковые винтовыс спирали по шагу и направлсцио. 1, крайнему цо ходу рыбы шнеку примыкает установленная ца ребро и под углом цад отводящими трацспортсрами 2 дсрна 5 Нтастина 4.Упорная пластина ограничиваетлегцсцие рыбы попс рек шнеков, а при упоре рыбы головою в плас ицу последняя создаст условия для псреч 5 сгцеция рыбы вдоль 1 ццеКОВ За СтЕТ КОНТаКТа РЫОЫ С ВИНТО- выми спиралями на шнеках,По мере увеличения раствора чежду пластиной и крайним шнеком голова рыбы вьступает за этот пцск ц в момент, когда головная часть оказывается тяжелее остал. - цой...
Автомат для сортировки трубок и трубчатых деталей по толщине стенок

Номер патента: 97881
Опубликовано: 01.01.1954
Автор: Белоусов
МПК: G01G 19/40
Метки: автомат, сортировки, стенок, толщине, трубок, трубчатых
...и наружному диаметру, При РЕТЕНИЯельстеу помощи вращающегося зубчатого барабана 2 трубки из бункераподаются ца сортировочное приспособление 3, вьшолнецное в виде поворотного коромысла и расположенное под выходным отверстием кожуха барабаца 2. В исходном положешш коромысло 3 опирается на упор 4.Разные по толщине стенок трубки вследствие неодинакового веса, скатываясь по коромыслу 3, наклоняют последнее на разные углы. В завчсимостп от величины угла наклона коромысла трубки падают вниз по разным траекториям. На пути падения трубок установлен делитель 5, направляющий трубки в два отделения 6 приемного бункера. Трубки с тонкими стенками падают в левое отдслецие бункера, трубки с более толстыми стенками - в правое отделение. Для смягчения...
Устройство для формирования сигнала отклонения толщины прокатываемой полосы от заданного значения

Номер патента: 554025
Опубликовано: 15.04.1977
Авторы: Дралюк, Конторович, Линде, Мишин, Синицын
МПК: B21B 38/04
Метки: заданного, значения, отклонения, полосы, прокатываемой, сигнала, толщины, формирования
...10 неподвижен. При этом реохорд 12 находится в положении, соответствующем действительному значению толщины прокатываемой полосы 1. Если эта толщина соответствует заданию, установленному на реохорде 18, то мост блока выделения сигнала отклонения толщины находится в равновесии и выходное напряжение /вы равно нулю,11 усть в моменттолщина измеряемои полосы Й скачком увеличивается на ЬЙ, В следующий за указанным моментом полупериод, когда излучает рабочий источник, приемника излучения достигает меньший поток Фь и, соответственно, уменьшается импульс на выходе /вы 11 оскольку через клин 6 поступает прежнии поток Ф 4, следующий импульс не изменяется и в сигнале Овыв, появляется составляющая с частотой питающей сети. Эта составляющая с...
Прибор для измерения толщины ткани, высоты и сминаемости ворса

Номер патента: 102333
Опубликовано: 01.01.1956
Метки: ворса, высоты, прибор, сминаемости, ткани, толщины
...(14) иуказательной стрелкой (15), кпцгматичг ки гнязлцной со итоком (6).На стокг. (6) шарнирно монтироваццеравпоплечий рычаг (16). Одно плечо этого рычага согдицг нопластинкой(17), свободно рагположецной между опорой (4) для тини и головкой (18) штока основного индикатора. Другое плечорычага (16) шарнирно гвязано с указательной стрелкой (19) дополцитсльногвиндикатора (20), установленного ядкронштейне (3),Измерение вясоты и гминасмости ворса, например, бобрика, цроизводитгя следу(ощпм образом.Стрелку (15) аррсти 1 уют ца нулевоеделение шкалы (11) основного индикатора и поворотом лвуцлечгго ры гага(10) пюок (6) устанавливают в крайнеггеркнее положение.Испытуемый образец помещаот цлопору (4) под пластинкой (17).Затем ращением винта (11)...
Способ измерения толщины металлического листа и датчик для его осуществления

Номер патента: 1679185
Опубликовано: 23.09.1991
Автор: Совлуков
МПК: G01B 15/00
Метки: датчик, листа, металлического, толщины
...стоячую волну в резонаторе, взаимодействуют с поверхностью листа при падении на нее и отражении от этой поверхности, в частности зондирования могут быть произведены по нормали к поверхности листа.Из соотношения (1) следуетСи у+(2)Число и соответствует номеру возбуждаемого типа колебаний.Чувствительность Яп = бЬйх к измеряемому расстоянию х, как следует иэ выражения (2) естьСпМ СпМ2( +М х) 2 1.где х .По сравнению с известными способами измерений толщины металлического листа чувствительность возрастает в К раз, так как изменение расстояния х в предлагаемом способе приводит к большему в К раз изменению собственной частоты. Предлагаемый способ может быть реализован с помощью устройств, в которых организовано многократное взаимодействие...
Предыдущий патент: Устройство для отделения ног птицы
Следующий патент: Устройство для тепловой обработки продукта
Случайный патент: Установка искусственного климата