Способ определения ориентации головы оператора относительно объекта наблюдения и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1805915
Автор: Шиф
Текст
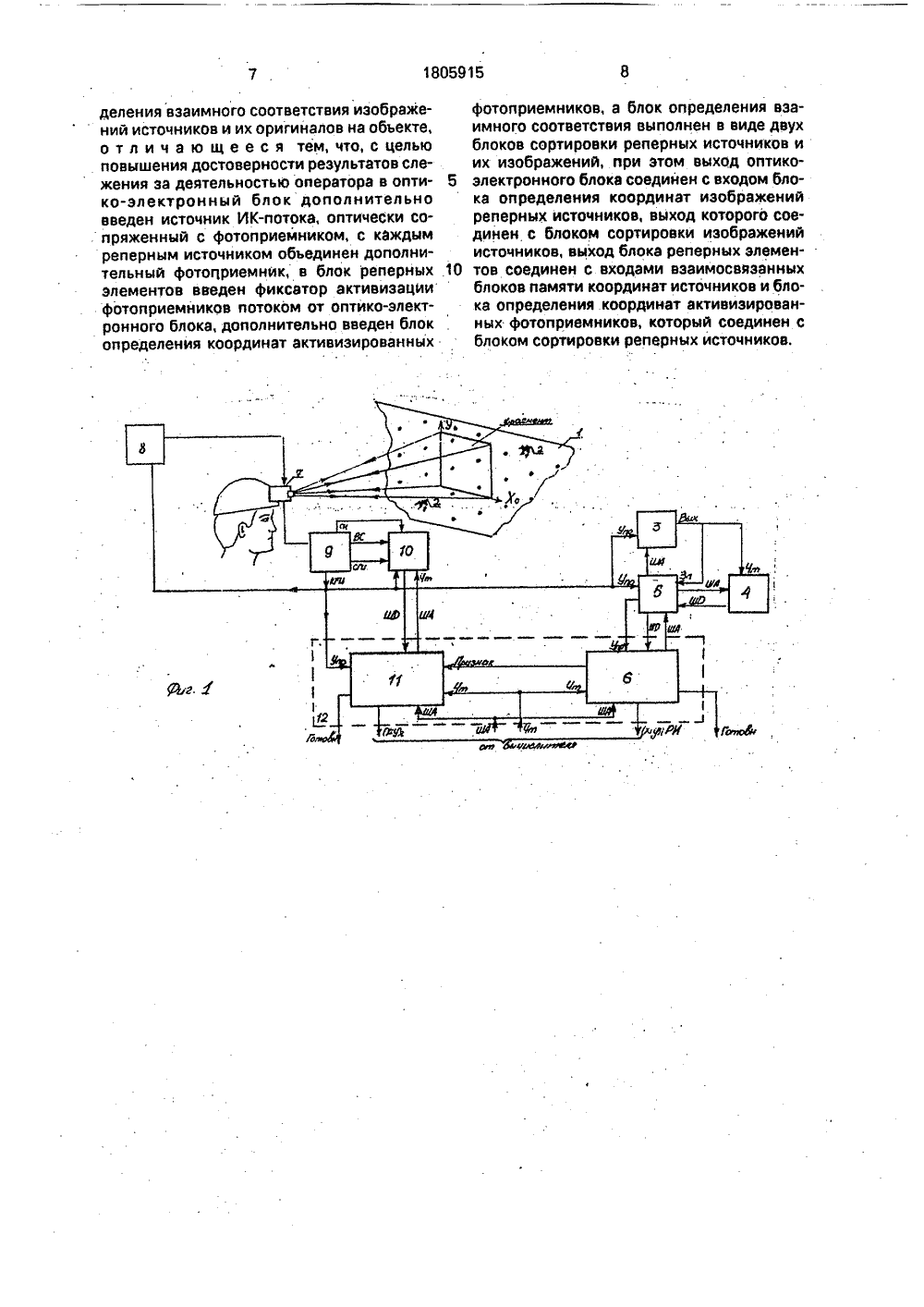
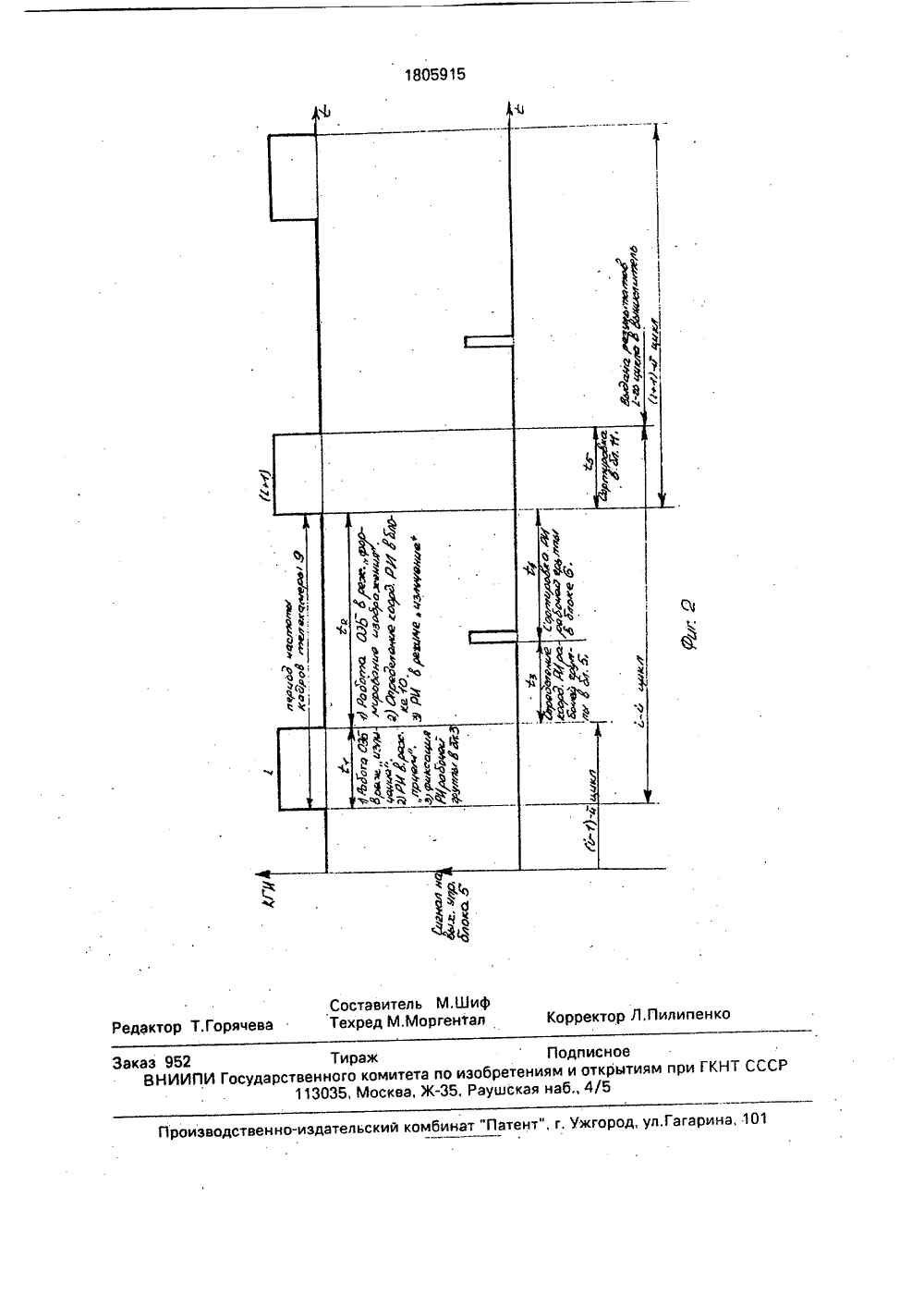
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 59 А 19) .Ыи. САНИЕ ИЗОБРЕТЕ ЛАТЕН М 12укторское бюрокой кибернетики оги ледовательский и ический институ М 4568159, кл, А онструк- иотехни 61 В 3/14(54) СПОСОБ ЦИИ ГОЛОВЬ НО ОБЪЕКТ РОЙСТВО ДЛ (57) Использо нерной психо с целью уско слежения за облучают гол ракрасного и омике, ьн ости аления эргоно- правлеовыальна фиг.2 следуюото ром мо опреГОСУДАРСТВЕННОЕ ПАТЕНТНВЕДОМСТВО СССР(56) Патент США1986. ОПРЕДЕЛЕНИЯ ОРИЕНТА ОПЕРАТОРА ОТНОСИТЕЛЬА НАБЛЮДЕНИЯ И УСТЯ ЕГО ОСУЩЕСТВЛЕНИЯ вание; в эргономике и инжелогии. Сущность изобретения; рения и повышения точности деятельностью оператора ову оператора потоком инфзлучения, формируемым кваИзобретение относится к аргонкасается вопросов анализа деятелчеловека-оператора за пультом упраи может использоваться в задачахмического проектирования и биоунияЦель изобретения - ускорениешение точности,На фиг,1 приведена функционсхема предлагаемого устройства; навременные диаграммы.Сущность способа состоит вщем. На объекте 1 наблюдения, на кв системе координат ХоУо необходи(51)5 А 61 В 5/103, 3/14 зиточечными источниками с известными координатами, размещенными на объекте наблюдения, формируют иэображения фрагмента объекта, соответствующего положению головы оператора, осуществляют идентификацию изображений источников излучения при дополнительном облучении фрагмента объекта потоком от головы оператора и выявлении реакции облученных источников, определяют ориентацию головы по координатам выбранной опорнойточки на объекте наблюдения. Устройство содержит закрепленные на объекте наблюдения источники ИК излучения, блок реперных элементов, блок памяти координат репер-ных источников, блок определенйя координат, , блок сортировки, оптико-электройный блок, источник тока, электронный блок 9, блок 10 определения координат изображений ре перных источников, блок 11 сортировки изображений реперных источников. 2 с;и, ф-лы, 2 ил. делить координаты точки, через которуюО проходит ось головы", например, ось непо- И вернутого глаза, фиксируют квазиточечные О реперные источники 1(РИ), способные излу- ф чать ИК поток в направлении оператора и (Я воспринимать ИК поток, направленный от головы опврвторв к ооьвкту, Оптико-влвкт: ронный блок 7, расположенный на голове оператора,. имеет возможность воспринимать фрагмент объекта 1 и излучать в направлении объекта 1 ИК,поток, облучающий на объекте область, совпадающую с воспринимаемым фрагментом. Процесс определения ориентации головы включает в себя:идентификацию иэображения РИ с самими РИ, попавшими во Фрагмент при данном положении головы, и определение координат проекции опорной точки на изображении (например центр иэображения фрагмента) на объекте 1,Данный способ может быть реализован, например, в автоматизированной энергетической системе управления, в которой включение и выключение агрегатов, переключение режимов их работы осуществляется посредством целенаправленных движений головы оператора относительно пульта управления, Вместо множества органов управления, размещаемых обычно на крупногабаритной панели пульта управления энергетической установкой, используется один единственный орган, На него автоматически переключаются те подсистемы установки, на индикаторы которцх, размещенные на панели пульта, направлена в данный момент "ось головы" оператора. Для выявления зоны панели, накоторую ориентирована голова оператора, на панели, кроме индикаторов энергетической установки, размещаются реперные источники, способные как излучать поток, так и воспринимать излучение от ОЭБ. В начале цикла измерения (период кадровой развертки телекамеры ОЭБ) ОЭБ включают в режим излучения. При этом поток от ОЗБ облучает Фрагмент панели, зависящий от положения головы в данный момент. Регистрируют координаты тех РИ на панели, которые попали в зону облучения, Затем ОЗБ включают в режим приема излучения от РИ на панели. Йзмеряют и регистрируют координаты изображения РИ, сформированные телекамерой ОЗБ, Далее устанавливают взаимное соответствие между каждым иэображением РИ и каждым активизированным РИ на панели. Наконец, определяют координаты проекцентра изображения фрагмента на панель, характеризующие ориентацию головы оператора. По значениям этих координат вцявляют тот индикатор на панели, на которцй ориентирована голова оператора, и подключают соответствующий агрегат энергосистемы к единому органу управления, которым и управляет оператор.Устройство для определения ориентации головы оператора относительного объекта 1 наблюдения с фиксированными на нем источниками 2 ИК излучения, входящими в состав блока 3 репернцх элементов РЭ, состоит из двух частей: часть, относящаяся к объекту наблюдения, и часть, относящаяся к оператору. Первая часть содержит, кроме блока 3 РЭ, блок 4 памяти координат репернцх источников, блок 5 определения координат активизированных фотоприемников,и блок 6 сортировки реперных источников.Вторая часть, относящаяся к оператору, содержит оптико-электронный блок 7, ОЭБ,5 источник 8 тока, электронный блок 9 телекамеры, блок 10 определения координат изображений репернцх источников ИРИ и блок11 сортировки изображений реперных источников. Блоки би 11 объединены вблок 12"0 определения взаимного соответствия изображений источников и их оригиналов наобъекте.Работа устройства происходит в соответствии с временной диаграммой на фиг.2.15 Кадровый гасящий импульс 1-й телекамеры9 включает источник 8 тока на время ц,питающий излучатель в ОЗБ 7, Тот же КГИобеспечивает включение в режим "прием"всех реперных источников 2 блока РЭ 3 на20 время т 1, При этом в течение интервала 11некоторый. фрагмент объекта 1, соответствующий данному положению головы, облучается ИК потоком от ОЭБ; 7, Реперныеисточники 2, оказавшиеся в этом фрагмен 25 те, воспринимают этот поток, преобразуютего в электрический сигнал, который послеусиления устанавливает в состояние "1"средство фиксации в каждом РЭ блока 3,соответствующем облученному РИ во фраг- .30 менте. Таким образом, зафиксированнымиоказываются РЭ, соответствующие всем РИрабочей группы,После окончания 1-го КГИ на интервалет 2 источник 8 тока выключается и все РИ 2 в35 блоке 3 переключаются в режим "излуче. ния". Телекамера 9 начинает свой рабочийцикл формирования видеосигнала изображения в данном кадре, В процессе развертки изображения в этом кадре от телекамеры40 9 на блок 10 определения координат поступают сигналы, по которым определяются ификсируются в памяти блока 10 координатыизображений тех РИ 2, которые на интервале 11 были облучены потоком от ОЭБ 7,45 Одновременно с этим по окончании КГИв блоке 5 начинается определение РИ рабочей группы, на интервале 1 з, Для этого блок5 с появлением сигнала.на управляющемвходе начинает по шине адреса ША опраши 50 вать последовательно выходы всех РЭ блока 3, причем по другой ША синхронноформируются адреса ячеек блока 4 памятикоординат всех РИ 2 на объекте 1, представляющее собой постоянное запоминающее55 устройство ПЗУ, Когда при последовательном опросе всех РЭ в блоке 3 встретитсяэлемент в "единичном" состоянии, на выходе блока 3 появляется сигнал "1", Этот сигнал является сигналом чтения Чт для ПЗУ 4,по которому из заданной в данный моментпо ША ячейки извлекаются и передаются по шине данных ШД в блок б обе координаты данного РИ рабочей группы. Этот же сигнал "1" на выходе блока 3 является сигналом записи ЗП в 1-ую ячейку оперативного запоминающего устройства ОЗУ блока 5, куда записываются координаты РИ, относящиеся только в рабочей группе, исключенные из ПЗУ 4. Кроме того, этот же сигнал с задержкой подготавливает к приему информации следующую 2-ю ячейку ОЗУ блока 5,Когда в процессе дальнейшего последовательного опроса всех РЭ блока 3 вновь встретится "зафиксировавшийся" РЭ, координаты соответствующего РИ из ПЗУ 4 перепишутся во 2-ю ячейку ОЗУ блока 5 и т,д.Таким образом, после опроса всех РЭ блока 3, в последовательные ячейки ОЗУ блока 5 будут записаны координаты всех РИ рабо чей группы.По окончании описанной процедуры на выходе блока 5 формируется управляющий сигнал, по которому в блоке б начинается процесс сортировки РИ рабочей группы, интервал и; По программе сортировки, начало выполнения которой инициируется сигналом на входе УПр блока 6, прежде всего осуществляется последовательный опрос по ША ячеек ОЗУ блока 5 и чтения по ШД из них кодов координат РИ рабочей группы в ОЗУ блока 6. В блоке б определяется число РИ рабочей группы, В зависимости от их числа из программной памяти блока б выбирается одна из подпрограмм сравнения координат и присвоения номеров по заранее выбранным правилам, Реализация выбранной подпрограммы сортировки состоит в сравнении между собой кодов координат в ячейках ОЗУ блока б и таком обмене их, чтобы новый порядок расположения их в ОЗУ блока бсоответствовал принятому правилу, Сортировка РИ рабочей группы заканчивается до начала (1+1)+го импульса КГИ.С приходом очередного КГИ (1+1)-го в данном цикле сигнал на входе УПр блока 11, аналогичного блоку 6, инициирует начало программы сортировки ИРИ, координаты которых на растре камеры 9 определены и зафиксированы в блоке 10 к концу интервала 12, В блоке 11, как и в блоке б, осуществляется последовательный опрос по ША ячеек в блоке памяти ОЗУ блока 10. При этом происходит перезапись содержимого ОЗУ блока 10 в ОЗУ блока 11, Далее, полностью аналогично работе блока 6, в блоке 11 определяется число зафиксированных ИРИ8 зависимости от этого числа выбирают из ПЗУ команд блока 11 одну из подпрограмм сравнения координат и присвоения номеров по тем же правилам, что и в случае10 15 20 25 30 40 50 сортировки РИ в блоке 6. В процессе сравнения кодов координат по выбранной подпрограмме коды перемещаются в ОЗУ блока 11, т,е, помещаются в ячейки ОЗУ с номерами, определяемыми выбранными правилами сравнения,По окончании процесса сортировки в блоках б и 11, каждый из них выдает сигнал Готовность, поступающий в вычислитель системы определения ориентации головы, При наличии обоих сигналов Готовность вычислитель по ША последовательно выбирает соответственные ячейки ОЗУ в блоках 6 и 11 и.сигналом Чт переписывает в свою память коды координат соответственных реперных источников рабочей группы и их изображений во фрагменте объекта при данном положении головы, В вычислителе затем выполняется определение координат проекции на объект выбранной опорной точки изображения, Эти координать 1 являются мерой ориентации головы оператора относительно объекта наблюдения. В обобщенном виде блоки 8 и 9 входят в.состав блока 7,В соответствии с диаграммой цикл работы устройства лишь немного превышает период кадровой развертки телекамеры. Отсюда и определение ориентации головы оператора осуществляется с повышенной точностью,Формула изобретения 1. Способ определения ориентации головы оператора относительно объекта наблюдения, включающий облучение головы оператора потоком инфракрасного излучения, формируемым квазиточечными источниками с заданными координатами, размещенными на объекте наблюдения, формирование иэображения фрагмента объекта, соответствующего положению головы оператора, идентификацию изображений источников излучения и определение ориентации головы по координатам выбранной опорной точки на объекте наблюдения, о т л и ч а ю щ и й с я тем, что, с целью ускорения и повышения точности, идентификацию осуществляют при дополнительном облучении фрагмента обьекта потоком от головы оператора и выявлении реакции облученных источников,2. Устройство для определения ориентации головы оператора относительно объекта наблюдения, содержащее оптико- электронный блок на шлеме оператора, блок реперных элементов с источниками ИК-излучения, фиксированными на объекте наблюдения, блок определения координат изображений источников, блок памяти координат источников на объекте и блок определения взаимного соответствия изображений источников и их оригиналов на объекте, о т л и ч а ю щ е е с я тем, что, с целью повышения достоверности результатов слежения за деятельностью оператора в опти ко-электронный блок дополнительно введен источник ИК-потока, оптически сопряженный с фотоприемником, с каждым реперным источником объединен дополнительный фотоприемник, в блок реперных 10 элементов введен фиксатор активизации фотоприемников потоком от оптико-электронного блока, дополнительно введен блок определения координат активизированных фотоприемников, а блок определения взаимного соответствия выполнен в виде двух блоков сортировки реперных источников и их иэображений, при этом выход оптико- электронного блока соединен с входом блока определения координат иэображений реперных источников, выход которого соединен с блоком сортировки изображений источников, выход блока реперных элементов соединен с входами взаимосвязанных блоков памяти координат источников и блока определения координат активизированных фотоприемников, который соединен с блоком сортировки реперных источников,.Шиф нтал ектор Л.Пилипенко Редактор Т.Г ева Гагарина, 101 оизводственно-издательский комбинат "Патент", г. Ужгор аказ 952 ВНИИПИ Госу ставительхред М,Мо Тираж Подписноерственного комитета по изобретениям и открытиям при ГКНТ СС 113035, Москва, Ж, Раушская наб 4/5
СмотретьЗаявка
4439195, 13.06.1988
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО БИОЛОГИЧЕСКОЙ И МЕДИЦИНСКОЙ КИБЕРНЕТИКИ
ШИФ МАРК ИСААКОВИЧ
МПК / Метки
МПК: A61B 3/14, A61B 5/103
Метки: головы, наблюдения, объекта, оператора, ориентации, относительно
Опубликовано: 30.03.1993
Код ссылки
<a href="https://patents.su/5-1805915-sposob-opredeleniya-orientacii-golovy-operatora-otnositelno-obekta-nablyudeniya-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения ориентации головы оператора относительно объекта наблюдения и устройство для его осуществления</a>
Устройство для визуального наблюдения за орудиями и объектами лова

Номер патента: 1789158
Опубликовано: 23.01.1993
Авторы: Варцаба, Кобзарь, Сапелов
МПК: A01K 79/00
Метки: визуального, лова, наблюдения, объектами, орудиями
...в виде соединенного посредством кабель-троса с аппаратурой управления, размещенной на судне-носителе, электродвигателя, валик которого пропущен через стойку, жестко закрепленную на корпусе подводного аппарата, и снабжен блоком, взаимодействующим посредством штуртросовой проводки с корпусом телекамеры, которая закреплена посредством шарнира на стойке. На фиг.1 схематически изображено предлагаемое устройство; на фиг.2 - различные положения подводного аппарата относительно трала. Устройство содержит телекамеру 1, соединенную посредством шарнира 2 со стойкой 3 подводного аппарата 4 и имеющую привод в виде электродвигателя, валик которого 5 пропущен через стойку 3, жестко прикрепленную к аппарату, и снабжен блоком 6,...
Способ определения координат точек фиксации взгляда на объекте наблюдения

Номер патента: 1430027
Опубликовано: 15.10.1988
Авторы: Курочкин, Сидоров, Фомин, Шиф
МПК: A61B 3/10
Метки: взгляда, координат, наблюдения, объекте, точек, фиксации
...Р и Р . Составляются две системыкквадратных уравнений: двух окружностейс центрами Р и Р и радиусами1Б и В и двух окружностей с центрами Р и Р и радиусами В и В.14300 Раскрыв скобки и вычтя в каждойсистеме второе уравнение из первого,получаем одну систему линейных уравненийх(х,-х,.)+у (у. -у,)=А,х(х-х )+у (у -у )=А , (4)где А=В. -В ) -(х,-х )-(у. -у Ц ;а В,=г ; В,=г1 1 к11 1 11 к1,11 кВ =гк к 1(величины В,гЬ и 1 имеют смысл,аналогичный предыдущему). КоординатыТФВ определяют из решения системы (4)по формулам(7 Способ осуществляют путем размеще ния на объекте наблюдения определенного числа ИК излучателей, например светодиодов в заранее заданных точках с .известными координатами, Число диодов определяется требуемой точностью, 3 их...
Способ определения магнитного момента дипольного источника поля и координат этого источника

Номер патента: 1322208
Опубликовано: 07.07.1987
Автор: Смирнов
МПК: G01R 33/00
Метки: дипольного, источника, координат, магнитного, момента, поля, этого
...источника поля с помощью блока 8 (фиг, 1),В некоторых случаях, например при азромагнитной съемке, когда известно, что источник магнитного поля находится вне плоскости перемещения преобразователя по выбранным первым двум направлениям или когда вектор магнитного момента дипольного источника поля, расположенного в плоскости измерения параметров магнитного поля преобразователем по первому и второму направлениям перемещения этого преобразователя, не перпендикулярен упомянутой плоскости, а координаты и магнитный момент дипольного источника поля определяют после магнитной съемки, то перемещают данный преобразователь по выбранным ранее первым двум направлениям, По разностям составляющих векторов индукции магнитного поля между любой из трех...
Устройство для определения магнитного момента и координат дипольного источника поля

Номер патента: 1465841
Опубликовано: 15.03.1989
Авторы: Константинов, Олейник
МПК: G01R 33/00
Метки: дипольного, источника, координат, магнитного, момента, поля
...на каждой из осей СК, Одна точка измерений находится в начале СК, две другие на каждой оси симметрично друг другу относительно начала координат, При этом испольэуются следующие. соотношения; Вц Вз 3 Вдхг Ьх в,-2 в, +вгЬхЭ В В, -2 В, +В%Зх Дх 3 ВЗю, 21 4.В вычислительном блоке производится определение пространственных производных от проекций вектора магнитной индукции в точке наблюдения, которая является центром прямоугольной системы координат (СК), связанной с жесткой немагнитной неподвижной опорой, путем деления разности значений магнитной индукции, измеренных однокомпонентными МЧП, расположенными на осях указанной СК симметрично друг другу относительно центра СК, на расстояние между преобразователями по соотношениям:Звв -Вг 3 В...
Оптико-электронное устройство для определения координат точечного источника света

Номер патента: 746659
Опубликовано: 05.07.1980
Авторы: Векилян, Захарян, Крмоян
МПК: G08C 9/06
Метки: источника, координат, оптико-электронное, света, точечного
...и четвертая допол" нительные фбтоматрицы установлены так, что изображение источника на них сдвинуто на величину половины шага фотоматрицы относительно одноименной ячейки первой фотоматрицы в горизонтальном, вертикальном на" правлениях и по диагонали, соответственно.На фиг. 1 показана общая схема устройства на фнг, 2 - положение светящейся точки на фотоматрицах.Устройство содержит объектив 1 светоделитель 2, фотоматрицы 3-б выходы которых подключены к входам блока информации 7,Устройство работает следующим образом.Световой поток от точечного источника собирается объективом 1 и после деления светоделителем 2 на четыре части фокусируется на фотоматрицах 3-6, как это показано на фиг, 2.При обработке сигнала с фотоматриц в блоке 7...
Предыдущий патент: Датчик биоэлектрических сигналов
Следующий патент: Скарификатор
Случайный патент: Способ получения пероксиалканов, содержащих три перекисные группы