Система программного управления токарным станком
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 129451
Автор: Каплан

Текст
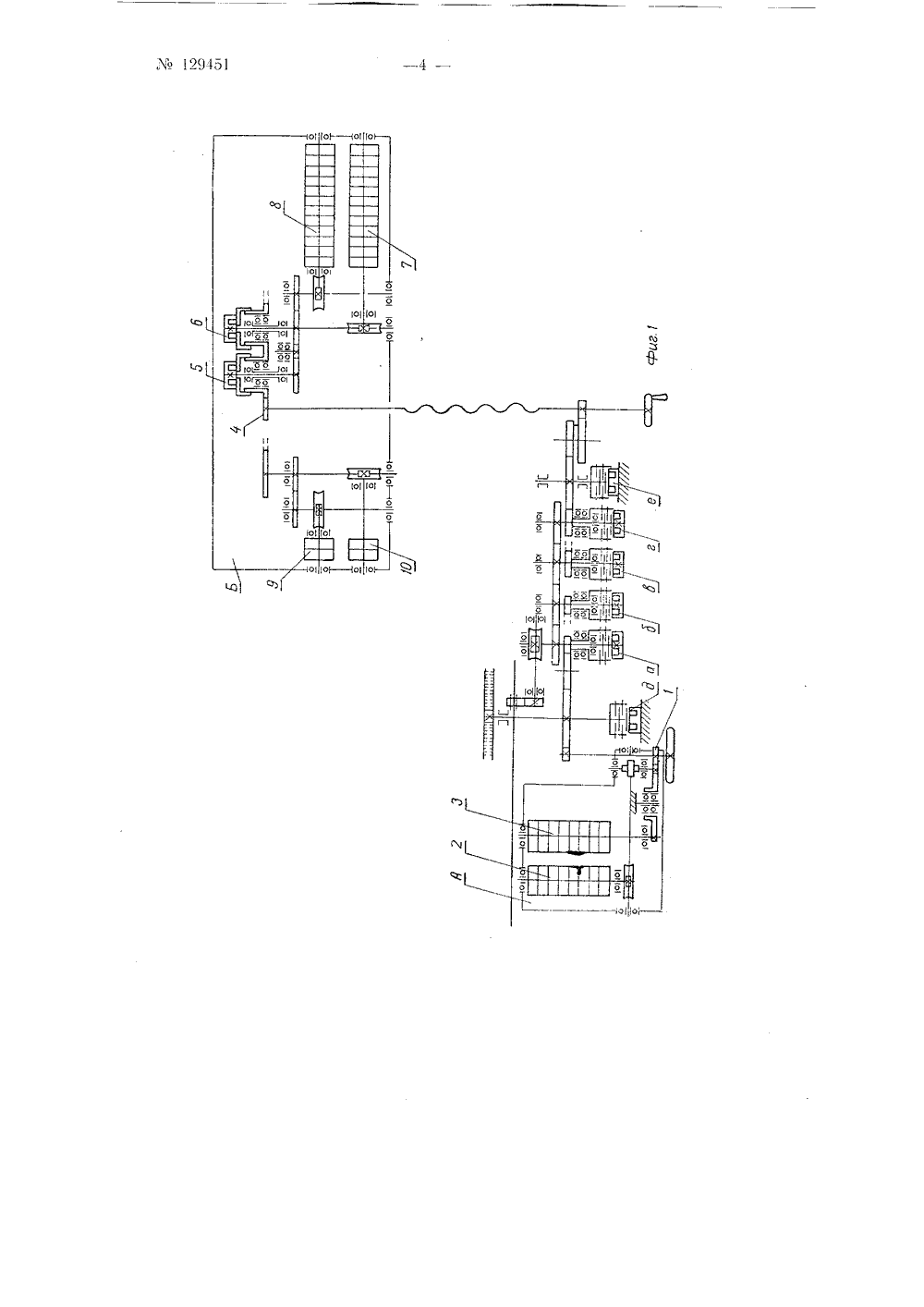
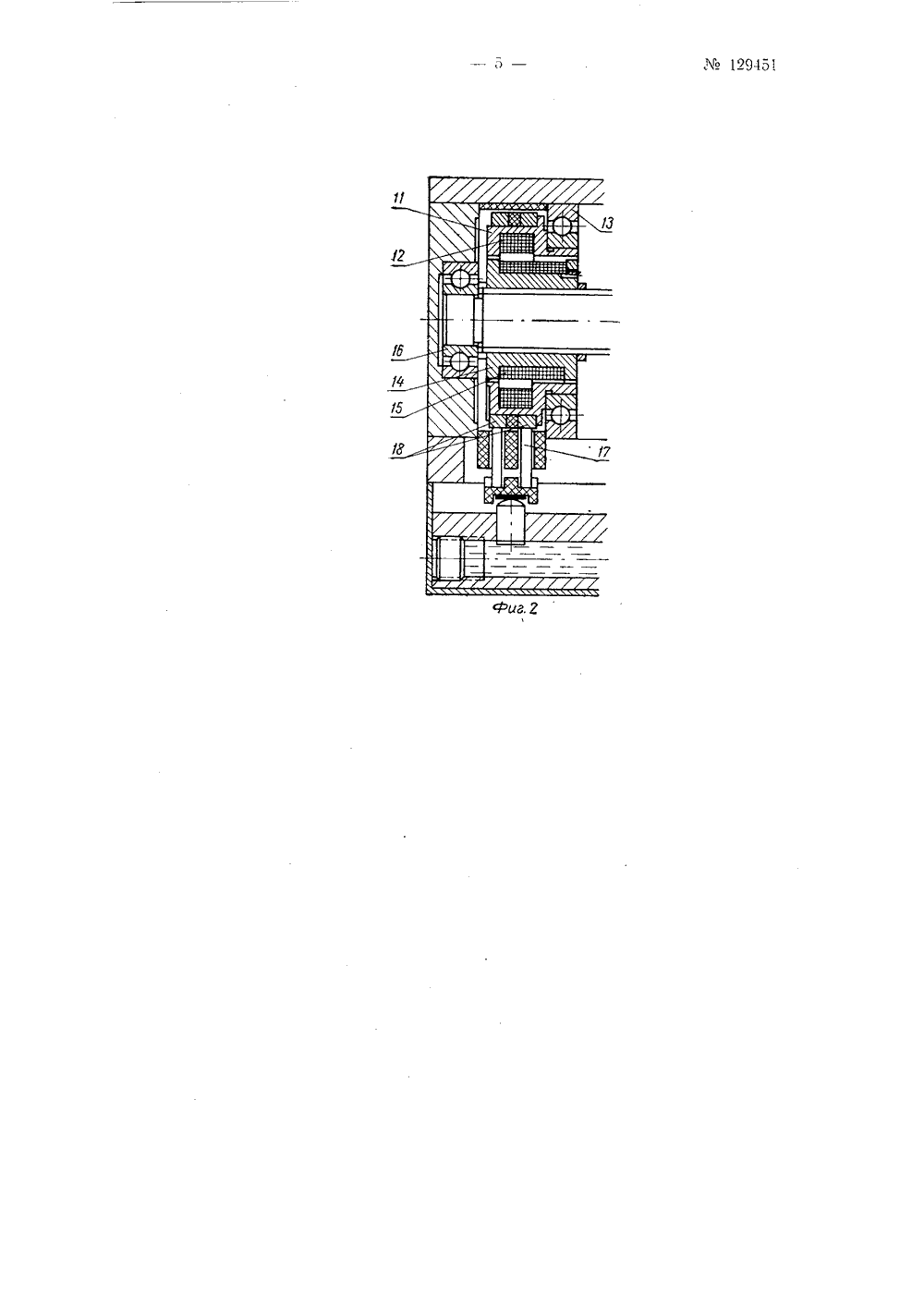
БРЕТЕНИ ДЕТЕЛЬСТВУ ПИСАНИЕ ИЗК АВТОРСКОМУ С одвнснн) ао 1 нно д 212 М. СИСТЕМА ПРОГРАММНОГО УПРАВЛ СТАНКОМ ДЛЯ ОБРАБОТКИ СТУПЕН ИЯ ТОКАРН ТЪХ ВАЛ И Заявлено 29 августа 1938 г. зз Хе 606740/26 в Комитет но делам изооретеннй и открытий ври Совете Министров СССР)и) Пликовано в 18 олле 1 ене изовретенийъ,х 12 за 1% В сушествую 1 цих системх ирогрммного упр 11 вйения токяр Ыми с 1 нк 1 ми Д.Я ООР 100 тки стУПенчЯтых БЯ,коз ф 1 ксЯЦИЯ 31 ДнноГ 1) РЯЗ- ера при переходе с одной ступени 11 другую осушс;твляется командо.11 ярятом с при)1 енение)1 Бряш 3101)цихся индх ктиь 1 ых д 1 тчик 013. Ткис сисемы прОГряммнОГО упрБ:сиия КОнстр) ктизио сг 10 жны.В ОписыВяехОй сис теме прОГрам хп 10 ГО у правтс 11 и 51 се;)дсчиики Вращаюцихся датчикоВ устаиОВлсны на Опорах качсни 51 тяк, что при устя- ОВКЕ КОЭРДИН 1 Т ОНИ СГСДУЮТ ЗЯ ЯКОРЯХ 1 И, КОТОРЫС КИИСМЯТИЧЕСК 1 СВЯ- заны с лимоами продольной и поперечной подчи для ф Ксац)1 и датчи- КОБ Б требуех 0) погОжснии.В целях повышения точности отсчета, описывемя систем проГр 1)мОГО Справления построена НО принципу сдвосциых датчиков, один из которых отсчитывает псрсмсщсиис на вск) длину, а другой - 11 13(ТЬ ЗГОИ ДЛИНЫ, ПРИ 1 ЕХ КОМЯИДНЫЙ ИМПУГ 1 ЬС ДЯСТСЯ ТОГ 1 ЬКО ПРИ с 1)в:11 дени Нулевых пок 133 ниЙ 000 их д 1 т 1 иков,ТРкая система прОГряммнОГО упрБ,ени 5 пОЗБО 1 яет .1 роизводить иаоор координат Н 1)средством лУбоз, что упроцаст конструкцию и создаст Бозмо)кОсть визуального наблюдения набора координат.На фиГ.изобракенЯ кинсх 1 Т 11 еская схем 1 описывасм 01 СИС 1 смы проГр 1 ммнОГО мпр 1 Влсиия; н 1 фиГ. ) - д 1 тик Б разрсЗс.) ) ф 1 ртуке ст 1 ик 1 устЯНЯБГив 1 стсЯ зех 1 1 дтИКОЗ:1 рОЛ 0,1 ЬИОГО п(.рсмсщсния, ня карсткс станка - узел Б датчиков поисрсчнОГО исрс- МС 1 ЦСНИЯ.Узе: Л получает Вращение от шесте;)ни 1, устновлсниои 11 оси М 1 ХОВИК 1 ф 1 РТУКЯ. ШЕСтСРНЯ 1 ЧЕРЕЗ ПРО)Е)КУГОтиЫС ШССТЕРНЧЕРБячиую пару передаст Вряшение ОдОврс)1 снио 51 коря)1: 2 и 3 дтпков. Узес Б поймчяст Врпеиис От шсстс 1)11; 4, )сяновлсниои ня Оси:10 пс М 29451 с)1)ЕЧНОГО ВИНТс КярСТКИ СТяПКЯ. ШССТЕрНя 4 СОООШс 1 ЕТ Врс 1 щЕНИЕ ССрдсс 1- 5 ИКЯМ Мс 1 ТНИТПЫХ ууфТИ 6 П;13,ЕЕ сЕрсз ПрОМСКуТОЧНЫЕ НССТЕрццсср(вясНьс пары 5 п(ор 5 ми -- 7 и 8. Якор 7 при замыкании мфты 5 и- лучает вращение в одну сторону, 3 при включении муфты 6 - рсверсивпое кращение.Муфты 5 и 6 обеспечивают обработку изделия передним прокол- ПЫ.11 ИЛИ ЗЯЛНИМ КЯНс 1 ВОЧНЫ, РЕЗЦс,1 И, с 1 ТЯКЖС РЯС 10 с 1 НЬЕ П ЛР)ИС рябты,В уэлс Б имеется группа датчиков 9 и 10, служацпх для наладки этик резцов на размер первой ступени, кацавки и якори которых через пром(куточныс шестерни и червячные пары получают вращение от шестерни, сидящей на сердечнике магнитной муфты 6.В узле А датчиков продольного перемещения имеется семь сдвоенных датчиков, что обеспечивает точснис сечи ступеней в лбой посгсдовятсльцостп, включая повторные проходь.В узле Б датчиков поперечного псремецецпя имеется двенадцать слвоенных датчиков ДлЯ пабоРа технлогических и оконсстесьпых Лс- метров. Кром( этого, в узле Б имеется два сдвоенных датчика, один ИЗ КООРЫХ ПРЕЛНЗЗнс 1 с 1 ЕП ДЛЯ НЯСТРЙКИ ПЕРВой СТМПЕНИ, ООРЯОЯТЫВЯС- мой передним резцом, я второй - ля Настройки и лиямет;) пс;)вой к- павки, Обрябятывясмой Зяднив рсзцом.Сердечник 11 датчика с катугшп 12 ус Гаповлец н шариколпипнике 1), я якорь 14 с оомткой 15 - ня цгярикополципникях 16, Ток к ксггУшке 2 полводитсЯ чеРез щетки 17 и контактныс кольца 1 с(, Ко 1- цы обмоток 15 соединяются (вслслов 1 ельно и выводятся к цептрс,ь- НОМУ СКОЛЬ 3511 ЦСЫУ (ОНТЯКТУ.1 рп 1 ропмскянии тОки ерсз кс 11 мцп(м 12 В ссрлссппкс 11 В 03,11 кяс магнитное поле, а об)мотка 15 прп )том сзлает магнитное поле той жс полярности в якоре 14. 1 ршсхолпт ивор Г ссрлечнпка 11, которын (с 1 М 10 уСТНяп;ИВСТСя Тяк, ЧТ Зязр МЕЖЛ НИМ И яКО,)С) 14 СТс 0;1 ИТСЯЛИПИОВЫ). ЕСГ 1ПОВСРЦМЬ М ЯКОВ 1 К фсРТМК, М(Тс 1 ПОВИИ ГО, ПМб) Г рсбуемый равмср, т олюврсмснно повернутся якори 14 сдвоенных ДтсИКОВ, а С НИМИ В(С СсрдЕЧНИКИ 11. ОбЕстОЧИВ ПЕрВуЮ Пару Катушек 12 сердечников 11 поворотом мховика, устанавливают размер следующей ступени и т. д. Так жс производится и набор размеров попсречнго перемещения, Исполнительными органами стяпкя являются муфты: а, подак)пая резец вправо, б- - влево, в - от сеоя и, - ня сеоя. Элсктротормоз д устраняет нежелательные перебеги в продольном направлении, электротормоз в - Г, псиеречном.При включении муфты в передний резец подходит к заготовке, а поперечный винт приводит во вращение якори 14 Датчиков. Ктушки 12 датчиков пс)парно вклк)чотея по мостико(вой схеме с помощью шагво ГО И(Кс 1 ТЕЛя. В МОМСНТ, КОГЛЯ:1330 р МЕЖЛу СЕ 1)ЛЕЧНИКМ 11 И яКОрЕМ 14 будет олинаковьй и элс)(гроизмсрптсльный прибор покажет к)ль, булет дан командный импУльс, Шгспоци": искатель подключит слвоепн.п дяти( и муфту О, Вк 1 чающую продольн) ю подачу рсзця, с Врящ(.писм якорей датчиков продсльшпо;срсмсшения, я тякжс мяпНтнуо муфту 5. Подача командного импульса будет произведена тем жс порядком, после чего искатель подклочит слвоенньш датчик попсречИ)го перемещения и муфту г. Резец булст отведен, Вк,почптся продольная поЛячя и т. д.Когда каретка займет такое пложсние, чтд задний кянвочный рс. зец установится у торца первого уступя, произойлет подключение лат- ЧИКОВ НЯ,3,КИ И ВК,1 ЮЧИТСЯ )1 с ф 1 Я 1)13 ГНИТНс 1 Я )11 фТс ) ВЫКПЧИТСЯ) .Цо 12 Ц 5Рсзсц подается к заГотовке. 110 с,с подачи КО.Зиди)ГО импульс 1 Вк,1 н)- дстс 51 муфта 6 Отвода резца От заГОтОВки, и ВК 310 чается маГиитная муфта б.Электрическ)я с(ез 11 1103 воляст П 1 и 1 юкО исиОГьз 0111, Оыстрыс перюе 1 цения к)рстки с) ппОрта д,я сокрлПения Врс)ини, нсоб 05 И)ОГО на пере)Сцсие резца От каняки к канавке.11 редм ст изобрстс и и яС исте)10 Р)ГРаъ 1 мнОГ 1) НР)Б,1 сния 1 ОкРным ст 1 П 1 ю) д,1 Я ООР 100 тки с Гпен 1 ты.( В 1, иков, управляемы КО)апдоа;п 1 раом при пере(0- де с одной ступени обработки на .ругуо с при)Снснисм 1)раш 1)ошикс 5 ПИДКТИВНЫ:( ДТИП(ОВ ДГ 1 Я фИКСаЦИИ 33 Д 3 НИОГО РЗЗСР 1, О Т; И ЧК)- щ а я с я те)1, чтО, с це,1 ъю упропе)1 ия конструкции 1 В)3)05 киости Визм)льнОГО иаб к)дения набор 1 координат псредством,и)бов и,)Одо,ьной и поперечной подачи, ссрдсчики Враша)оиИ.(С 5 датчиков уста- ИОВ,сны на Опор 1:( к 1 ения ти(, что При мсаиовкс к)ординат Они с 1 е - лм)т за якорями, кииематичсски связаииьи)с ГН)б)1)зи для фик(ацш н требуемом положении
СмотретьЗаявка
606740, 29.08.1958
Каплан Г. М
МПК / Метки
МПК: B23B 25/06
Метки: программного, станком, токарным
Опубликовано: 01.01.1960
Код ссылки
<a href="https://patents.su/5-129451-sistema-programmnogo-upravleniya-tokarnym-stankom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления токарным станком</a>
Датчик углового положения, скорости и ускорения вращения вала

Номер патента: 1101740
Опубликовано: 07.07.1984
МПК: G01P 3/489
Метки: вала, вращения, датчик, положения, скорости, углового, ускорения
...к второму входу блока вычитания частот, а выход второго нуль-органа соединен с входом формирователя задержанных импульсов.На фиг. 1,изображена структурная схема датчика углового положения, скорости и ускорения вращения, нафиг. 2 - осциллограммы, иллюстрирую- д 5щие работу датчика.Датчик содержит герератор 1 импульсов, выход которого подключен к счетному входу первого, счетчика 2,выполненного на триггерах. Выход старшего разряда счетчика 2 через формирователь 3 опорных сигналовсоединен со входом фазовращателя 4, подключенного своим выходом ко входу первого нуль-органа 5.35 Выход первого нуль-органа 5 соединен со входом разрешения записи первого регистра 6,информационные входы которого подключены к выходам соответ- , ствующих...
Датчик углового положения, скорости и ускорения вращения вала

Номер патента: 1213417
Опубликовано: 23.02.1986
Автор: Каплун
МПК: G01P 3/489
Метки: вала, вращения, датчик, положения, скорости, углового, ускорения
...функцию делителя частоты Г генератораина коэффициент 2 , так что на вы 1 ходе старшего и-го разряда счетчика 2 образуются прямоугольные имн пульсы с частотой Г =Г/2 , Формирователь 3 вырабатывает иэ выходных периодических сигналов первого счетчика 2 опорные напряжения фазовращателя 4, Первый нуль-орган 5 формирует иэ выходных синусоидальных сигналов фаэовращателя 4 прямоугольные периодические сигналы, по переднему фронту которых осуществляется запись кода первого счетчика 2 в первый регистр б. В первом регистре фиксируется код текущего углового положения вала. ФВыходные сигналы генератора 1 поступают также на первый вход схемы 7 запрета, на управляющий вход которой поступают сигналы с частотой3Г/2 с -го разряда первого счетчи 50 ка...
Фрикционная муфта с переменною скоростью вращения

Номер патента: 444
Опубликовано: 15.09.1924
Автор: Сластенин
МПК: F16H 15/08
Метки: вращения, муфта, переменною, скоростью, фрикционная
...сечения и сжатых на них помощью гаек и контр-гаек 26, при чем у одной половины фрикционных приспособлений диски 8, 8сцепляются с дисками 6, 6 снизу (правая половина фиг. 1), а у другой половины фрикционных приспособлений диски соприкасаются сверху, как показано на левой половине фиг. 1. Фрикционные при способления 7, 7 8, 8поворотно расположены на стойках 10, О .которые, благодаря кронштейнам 9 и тягам 14 шарнирно соединены со звездкой 15 зубчатого колеса 16 (фиг. 1), сцепленного с шестерней 17 валика 18; при поворотах в ту или другую сторону валика 18 фрикционные приспособления могут быть приближены или удалены от фрикционного колеса 5, благодаря чему происходит изменение точек касания дисков 8, 8 ., и 5, 5 : при глубоком...
Датчик прямоугольных импульсов с индикацией направления вращения

Номер патента: 217238
Опубликовано: 01.01.1968
Автор: Дренов
МПК: G01P 13/00, H03M 1/30
Метки: вращения, датчик, импульсов, индикацией, направления, прямоугольных
...углом 120, а тельно щетк ме того, дат проводников равления к ключи Т, и ключены к горный ключ В исходно чертеже, кл закрыты, Дата опубликования опи При вращении ротора К, например, по часовой стрелке после разрыва контакта междущеткой 3 и ламелью Л ключ Т, откроется, врезультате чего на диоды УД 1 и УДе будет5 подано анодное питание,Достигнув контакта со щеткой 1, ламельзамкчет эмиттер ключа Т, и базу ключа Те наплюс источника питания, В результате ключГ, откроется, а с ним - и управляющий диод10 УД Ключ Те будет в режиме глубокой отсечки. На резисторе 1 тн 1 появится напряжение,близкое по амплитуде к напряжению источника питания. При дальнейшем вращении ротора по часовой стрелке ламель перекроет щет 15 ки 1 и 2, поэтому ключ Т 1...
Датчик системы защиты турбомашиныот повышения частоты вращения вала

Номер патента: 812946
Опубликовано: 15.03.1981
Автор: Мирошниченко
МПК: F01D 21/02
Метки: вала, вращения, датчик, защиты, повышения, системы, турбомашиныот, частоты
...пружи ывающей оба бойка.На Фиг. 1 изображ н датчик, поперечный разрез; на фиг. 2 - вариант выполнения датчика.Датчик содержит первый боек 1, расположенный вне вала 2 и выполненный в виде полумесяца, внутренний диаметр которого равен наружному диаметру вала 2, и соединенный с упругим удерживающим элементом, напри мер пружиной 3, и второй боек 4, нрисоединенный к упругому удерживающему элементу (пружине 3), расположенный диаметрально противоположно по отношению к первому бойку .1, настроенный на другую частоту вращения. Датчик может быть снабжен плоской кольцевой пружиной 5, охватывающей оба бойка 1 и 4 (Фиг. 2).Датчик работает дующим обра812946 Формула изобретения ВНИ Тир бойка его центробежная сила преодолевает сопротивление пружины 3...
Предыдущий патент: Магазинный автомат
Следующий патент: Пневматический патрон для подачи и крепления прутка
Случайный патент: Устройство защиты кабельной линии связи от электромагнитных влияний