Способ измерения переменной магнит-ной индукции и устройство для егоосуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 822093
Автор: Прищепо



Текст
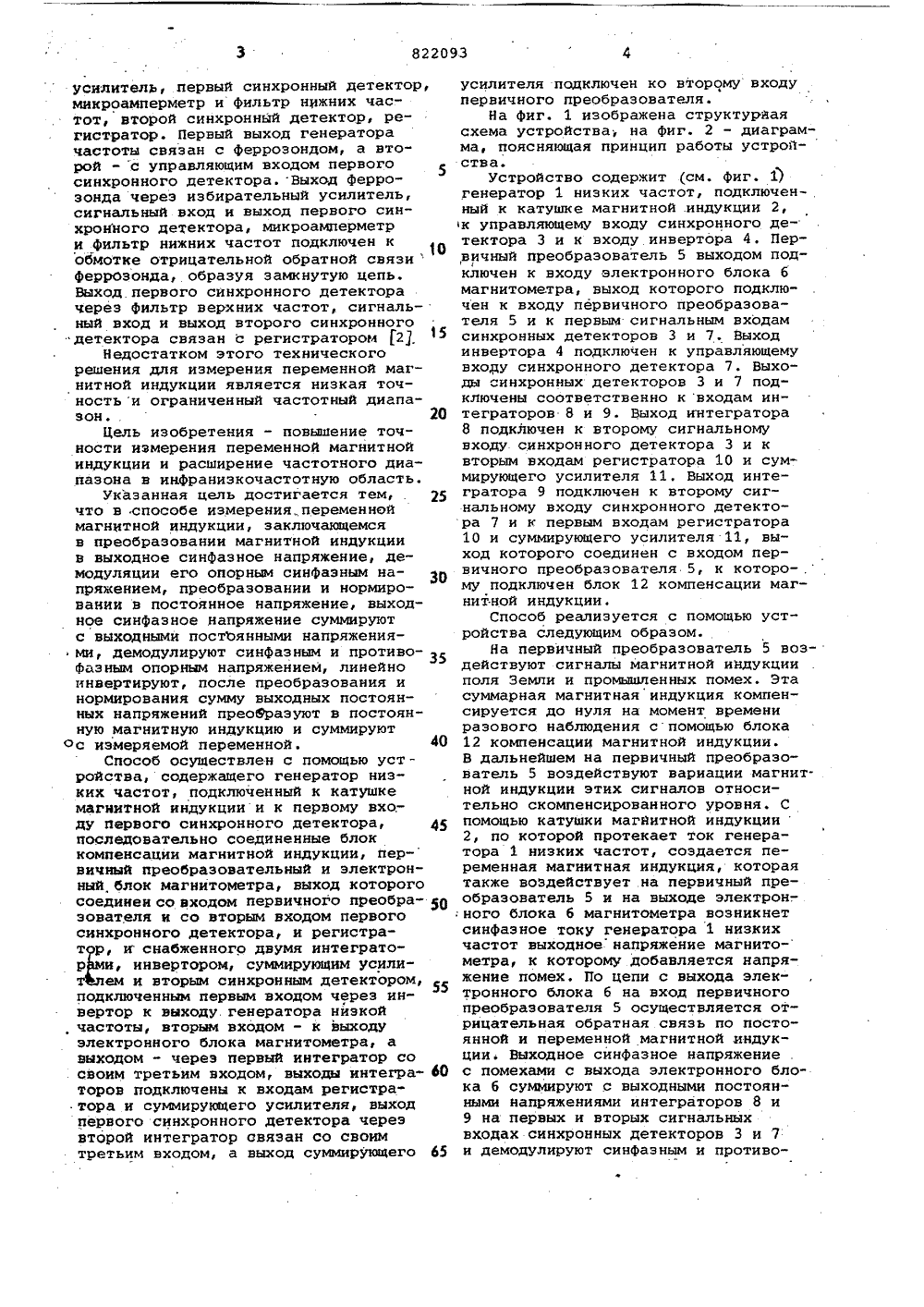
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Сова Советскик Социапистнцескик Республик(51),М. Кл. С 01 В 33/02 с присоединением заявки Йо(23) Приоритет Государственный комитет СССР по делам изобретений и открытий(5 Э) УДК б 21. 317., .44(088.8) Опубликовано 1504,81, Бюллетень М 9 14 Дата опубликования описания 15.0481(54) СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ МАГНИТНОЙ ИНДУК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯигобом над Изобретение относится. к измерительной технике и может быть исполь эовано для измерения магнитной индукции переменного поля, исследования магнитной. восприимчивости материалов, частотного зондирования при геофизической разведке, поверки мер магнитной индукции, градуировки магнитометров, измерения остаточной намагниченности горных пород и других измерениях в условиях промышленных помех. Известен способ измерения перемен ных магнитных полей, основанный на измерении вторичных ЭДС и ЭДС комбинационных частот, образованных частотой тока возбуждений феррозонда и измеряемого поля, по которым суят о параметрах магнитного поля.Устройство, реализующее данный,сп соб, содержит феррозонд,генератор возбуждения ферроэонда й анализатор спектра с ручной настройкой на требуемые частоты или панорамный с пре образованием частотного спектра феррозонда во временной интервал для наблюдения на экране амплитудных и частотных параметров выходного сигнала ферроэонда 11 . Недостатками известных способаустройства измерения переменной манитной индукции являются: низкая точность измерения, обусловленная влиянием постоянного и переменного. внешних магнитных помех и нейлинейнойхарактеристикой преобразования феррозонда от величины измеряемой переменной магнитной индукции, ограниченныйчастотный диапазон измерения ЭДС комбинационных частот, находящихся в окрестностях ЭДС четных гармоник возбуждения .ферроэонда, вызванный недостаточной избирательностью по соседне му каналу анализатора спектра.Наиболее близким к предлагаемомуявляется способ, основанный на преразовании магнитной индукции каналмагнитометра в выходное синфазное 20 пряженне, демодуляции его опорным синфаэным напряжением, преобразовании инормировании в постепенное напряжениеи его регистрации.Устройство для осуществления данного способа содержит генератор низкойчастоты, подключенный к катушке магнитной индукции и к управляющему входу второго синхронного детектора,магнитометр, включающий феррозонд с ЗО генератором частоты, избирательныйусилитель, первый синхронный детектор, микроамперметр и фильтр нижних частот, второй синхронный детектор, регистратор. Первый выход генератора частоты связан с феррозондом, а второй - с упРавляющим входом первого синхронного детектора. Выход феррозонда через избирательный усилитель, сигнальный вход и выход первого синхронного детектора, микроамперметр и фильтр нижних частот подключен к обмотке отрицательной обратной связиферрозонда, образуя замкнутую цепь. Выход. первого синхронного детектора через фильтр верхних частот, сигнальный вход и выход второго синхронного детектора связан с регистратором 2,Недостатком этого технического решения для измерения переменной магнитной индукции является низкая точность и ограниченный частотный диапазон. 20Цель изобретения - повышение точности измерения переменной магнитной индукции и расширение частотного диапазона в инфранизкочастотную область,Указанная цель достигается тем, . 25 что в способе измеренияпеременной магнитной индукции, заключающемся в преобразовании магнитной индукции в выходное синфаэное напряжение, демодуляции его опорным синфаэным напряжением, преобразовании и нормировании в постоянное напряжение, выходное синфазное напряжение суммируют с выходными постЬянными напряжениями, демодулируют синфазным и противоФазным опорным напряжением, линейно ннвертируют, после преобразования и нормирования сумму выходных постоянных напряжений преобразуют в постоянную магнитную индукцию и суммируют ос измеряемой переменной. 40Способ осуществлен с помощью уст - ройства, содержащего генератор низких частот, подключенный к катушке магнитной индукции и к первому вхо; ду первого синхронного детектора, 45 последовательно соединенные блок компенсации магнитной индукции, пер- вичный преобразовательный и электронный, блок магнитометра, выход которого соединен со входом первичного преобра- р зователя и со вторым входом первого синхронного детектора, и регистрат р, иснабженного двумя интегратор и, инвертором, суммирующим усилит ем и вторым синхронным детектором, 5 подключенным первым входом через инвертор к выходу генератора низкой , частоты, вторым входом - к выходу электронного блока магнитометра, а выходом - через первый интегратор со своим третьим входом, выходы интегра торов подключены к входам регистратора и суммирующего усилителя, выход первого синхронного детектора через второй интегратор связан со своим третьим входом, а выход суммирующего 65 усилителя подключен ко второму входупервичного преобразователя.На фиг. 1 изображена структурйаясхема устройства; на фиг. 2 - диаграмма, поясняющая принцип работы устройства,Устройство содержит (см. фиг. 1)генератор 1 низких частот, подключенный к катушке магнитной .индукции 2,к управляющему входу синхронного детектора 3 и к входу инвертора 4. Первичный преобразователь 5 выходом подключен к входу электронного блока 6магнитометра, выход которого подключен к входу первичного преобразователя 5 и к первым сигнальным входамсинхронных детекторов 3 и 7. Выходинвертора 4 подключен к управляющемувходу синхронного детектора 7. Выходы синхронных детекторов 3 и 7 подключены соответственно к входам интеграторов 8 и 9Выход интегратора8 подключен к второму сигнальномувходу синхронного детектора 3 и квторым входам регистратора 10 и суммирующего усилителя 11, Выход интегратора 9 подключен к второму сигнальному входу синхронного детектора 7 и к первым входам регистратора10 и суммирующего усилителя 11, выход которого соединен с входом первичного преобразователя 5, к которо-,му подключен блок 12 компенсации магнитной индукции.Способ реализуется с помощью устройства следующим образом.На первичный преобразователь 5 воздействуют сигналы магнитной ийдукцниполя Земли и промышленных помех. Эта суммарная магнитная индукция компенсируется до нуля на момент времени разового наблюдения спомощью блока 12 компенсации магнитной индукции. В дальнейшем на первичный преобразователь 5 воздействуют вариации магнитной индукции этих сигналов относительно скомпенсированного уровня. С помощью катушки магнитной индукции2, по которой протекает ток генератора 1 низких частот, создается переменная магнитная индукция, которая также воздействует на первичный преобразователь 5 и на выходе электронного блока 6 магнитометра возникнет синфаэное току генератора 1 низких частот выходное напряжение магнито- метра, к которому добавляется напряжение помех. По цепи с выхода электронного блока 6 на вход первичного преобразователя 5 осуществляетсяотрицательная обратная связь по постоянной и переменной магнитной индукции. Выходное синфазное напряжение .с помехами с выхода электронного блока 6 суммируют с выходными постоянными напряжениями интеграторов 8 и 9 на первых и вторых сигнальных входах синхронных детекторов 3 и 7 и демодулируют синфазным и противо822093 рующего усилителя 11, выход которого соединяется с входом первичногопреобразователя 5, приводит к стабн"лизации режима измерения магнитомет-ра благодаря отрицательной обратнойсвязи по магнитной индукциикотораяосуществляется путем преобразованиявыходного тока суммирующего усилителя 11 в магнитную индукцию на входепервичного преобразователя 5 посредством обмотки обратной связи. Приведенная диаграмма на фиг. 2 справедлива при отсутствии суммирующегоусилителя 11 с его связями в устройстве. Наличие суммирующего усилителя 11 с коэффициентом передачи много больше единицы позволяет при отрицательной обратной связи с его выхода на вход первичного преобразователя 5 скомпенсировать постояннуюсоставляющую напряжения ОО на выхо -де электронного блока б, при этомвременная ось Ос займет положеннеОТили в окрестности этой оси, определяемой коэффициентом передачи суммирующего усилителя 11 Наличие этойотрицательной обратной связи не позволяет медленным вариациям магнитной индукции поля Земли или промышленных помех вывести магнитометрпри работе на чувствительном пределеизмерений из диапазона измерений.Интеграторы 8 и 9, построенные наоперационных усилителях, позволяютполучить постоянные времени интегрирования несколько тысяч секунд. Всвязи с этим частотный диапазон измерения переменноймагнитной индукции может быть снабжен до сотых долей герца. Таким образом, способ и устройство для его реализации обеспечивают повышение точности измерения переменной магнитной индукции и расширение частотного диапазона в инфранизкочастотную область. Формула изобретения 1. Способ измерения переменной магнитной индукции, заключающий в преобразовании магнитной индукции в выходное синфазное напряжение, демоду" ляции его опорным синфазным напряжением, преобразовании и нормировании в постоянное напряжение, о т и ич а ю щ и й с я тем, что, с целью по" вышения точвости и расширения частотного диапазона в инфранизкочастотную область, выходное синфазное напряжение суммируют с внходными постоянными напряжениями, демодулируют синфаэ ным и противофазным опорным напряже. нием, линейно инвертируют, после преобразования и нормирования сумму выходных постоянных напряжений преобразуют в постоянную магнитную иидукных помех, магнитных шумов первичного преобразователя 5 и шумов электроники, не синхронных с частотой генератора 1 низких частот. Нормирование информативного параметра сигнала, за. ключающееся в подборе соотношений сопротивлений с выхода электронного блока б на первые сигнальные входы синхронных детекторов 3 и 7 и с вы" ходов интеграторов 8 и 9 на их вторые сигнальные входы, позволяет измерять средние, амплитудные и действующие значения синусоидальной магнитной индукции. Кроме того, устройство позволяет измерять амплитуду магнитной индукции, изменяющейся в виде периодической последовательности импульсов или миандра. Подключение к , выходам интеграторов 8 и 9 сумчи 50 65 фазным напряжением генератора 1 низких частот и инвертора,4 соответственно, при этом на выходе одногосинхронного детектора (допустим синхронного детектора 3) возникают положительные полупериоды синфазногонапряжения, а на выходе другого - отрицательные. Интеграторы 8 и 9 инвер"тируют и преобразуют полупериодысинфаэного сигнала в постоянные на,пряжейия О и Ор, которые подаютсяна вторые сигнальные входы синхронных детекторов 3 и 7 в противофазеположительным и отрицательным полу.периодом сигнала магнитометра в моменты времени от с 1 до си от сдо С (см. Фиг. 2), Рост выходных 15напряжений О+р и Ор интеграторов8 и 9 происходит до величин, при которых площади прямоугольников, основанием которых являются интервалывремени с, с и с сз полупериодов 20синфазного напряжения, будут равныплощадям положительного и отрицательного полупериодов напряжения в этиже интервалы времени (площади заштрихованы). Средние значения несинфазных напряжений (помех), проходящихчерез синхронные детекторы 3 и 7 навходы интеграторов 8 и 9 равны нулю,при этом будут равны нулю напряжения помех на выходах этих интеграторов. Регистратор 10 измеряет разностьвыходных напряжений О+р и Ор интеграторов 8 и 9. Изменение нулевогоуровня электронного блока б магнитометра из положения 01 в положениеОфсет приводит к изменению напряжений Ор и Ор интеграторов 8 и 9,но разность между ними остается прежней Опе. Следует. иметь в виду, чтои постоянные интегрирования интеграторов 8 и 9, и коэффициенты обратной 40связи с выходов интеграторов 8 и 9на входы синхронных детекторов 3 и 7должны быть равны. При этих условияхпривязка выходных напряжений интеграторов 8 и 9 к средним значениям синФазного выходного напряжения магнитометра не зависит от внешних магнит822093 Составитель Е. Данилинаенко Техред Т.Маточка Ви гула Редактор М тор о 0 Тираж 732 ПНИИПИ Государственного комитета СССРпо делам изобретений и открытий3035, Москва, Ж, Раушская наб., д, 4/5 аказ 1842/7 Водпис ППП фПатент", г. Ужгород, ул. Проектная фил цию и суммируют с измеряемой переменной.2. Устройство для осуществления способа по п, 1, содержащее генератор. низких частот; подключенный к катушке магнитной индукции и к первому5 входу первого синхронного детектора, последовательно соединенные блок ком-, пенсации магнитной индукции, первичный преобразователь и электронный блок магнитометра, выход которого соединен со входом первичного преобразователя й со вторым входом первого синхронного детектора, и регистратор, о т л и ч а ю щ е е с я тем, что, оно снабжено двумя интеграторами, инвертором, суммирующим усилителем и вторым синхронным, детектором подключенным первым входом черезинвертор к выходу генератора. низкой частоты, вторым входом - к выходуэлектронного блока магнитометра,выходом - через первый интегратоР сосвоим, третьим входом, выходы интеграторов подключены к входам регистратора и суммирующего .усилителя, выход первого синхронного детектора через второй интегратор связан со.своим третьим входом, а выход суммирую- .щего усилителя подключен ко второмувходу первичного преобразователя. Источники информации,принятые вовнимание при экспертизе1. Авторское. свидетельство СССРР 457944, кл. 6 01 Р ЗЗ/02, 1974.2. Афанасьев Ю.В., Студенцов Н.В.и др. Магнитометрические преобразователи, приборы, установки. Л.,фЭнергияф, 1972, с. 200-201.
СмотретьЗаявка
2801091, 23.07.1979
ПРЕДПРИЯТИЕ ПЯ А-1742
ПРИЩЕПО ВЛАДИМИР АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G01R 33/02
Метки: егоосуществления, индукции, магнит-ной, переменной
Опубликовано: 15.04.1981
Код ссылки
<a href="https://patents.su/4-822093-sposob-izmereniya-peremennojj-magnit-nojj-indukcii-i-ustrojjstvo-dlya-egoosushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения переменной магнит-ной индукции и устройство для егоосуществления</a>
Устройство для измерения переменной магнитной индукции

Номер патента: 1285416
Опубликовано: 23.01.1987
Автор: Прищепо
МПК: G01R 33/02
Метки: индукции, магнитной, переменной
...через схему И схемы 2 И-ИЛИ18 и управляет синфазно синхронным детектором 3 и противофазночерез инвертор 4 синхронным детектором 7. По мере увеличения числа. периодов сигнала генератора 1,заполняется счетчик 15 импульсови на последних шагах квантования по времени перед сменой состояний последнего разряда счетчика 15 импульсов дешифратор 16 вырабатывает сигнал для включения ключа 13, через который выходные напряжения интеграторов 8 и 9 измеряются регистрато" ром 10, В момент смены состояний последнего разряда триггера счетчи-, ка 15 импульсов дешифратор 16 снипри положительных полупернодах входного напряжения,и вычтется при отрицательнык, и в среднем значениичетного числа измерений, половинаиз которых одной полярности,...
Устройство для измерения магнитной индукции

Номер патента: 653590
Опубликовано: 25.03.1979
Авторы: Гусев, Константинов, Кусков
МПК: G01R 33/07
...и подключены к второму входу элемента сравнения, причем одна иэ первичных обмоток подключена параллельно моду ляционной катушке, а вторая - параллельно компенсационному резистору.Структурная схема устройства изображена на чертеже.Измеритель содержит гальваномаг 45 нитный преобразователь 1, модуляционную катушку 2, генераторы 3 и 4 переменного тока, усилитель 5, детектор б, фильтр 7 частоты Ю питания преобразователя 1,. фильтр 8 частоты модуляции Ш 2, регистрирующий прибор 9 иэлемент сравнения 10.Измеритель работает следующим образом.Гальваномагнитный преобразователь 1 находятся под воздействием постоянного магнитного поля Н и .переменного магнитного поля Нм , создаваемого модуляционной катушкой 2. Так как преобразователь...
Устройство для воспроизведения за-данных значений магнитной индукции

Номер патента: 811187
Опубликовано: 07.03.1981
Авторы: Мирошников, Студенцов, Хорев, Шилов, Шифрин
МПК: G01V 3/40
Метки: воспроизведения, за-данных, значений, индукции, магнитной
...12 и синтезатора частот 13.Требуемое значение тока устанавливается грубо на источнике тока 6, а точно - на 65 синтезаторе 13. Благодаря идентичности и 50 го подключен к управляющему входу первого источника тока.На чертеже представлена структурнаясхема устройства.Устройство содержит эталонную катушку1 магнитной индукции, намотанную накварцевом каркасе и помещенную внутрьпервой катушки 2 компенсации магнитногополя Земли (МПЗ). Две дополнительныеидентичные встречно-последовательновключенные токозадающие катушки 3 и 4магнитной индукции намотаны на общемкаркасе из кварца, ориентированы по направлению эталонной катушки и размещены внутри второй катушки 5 компенсацииМПЗ, эквивалентной катушке 2 и удаленной от нее на расстояние,...
Устройство для измерения магнитной индукции

Номер патента: 785812
Опубликовано: 07.12.1980
Авторы: Евтихиев, Куриленко, Погожев, Преображенский, Савченко, Экономов
МПК: G01R 33/02
...8836/5 ираж 1019 Подписно тивности, индикатор - к второй катушке, а плоскость пластины ориентирована параллельно осям катушек,На чертеже представлена функциональная схема устройства.Устройство содержит магниточувстзительный датчик 1 в вгде пластины из антиферромагнетика "легкАя плоскость" расположенный внутри двух взаимно перпендикулярных катушек индуктивности 2 и 3, перестраиваемый генератор 4, измеритель частоты 5 на основе электронно-счетного частотомера, индикатор б магнитоакустического резонанса на основе милливольтметра. Катушки 2 и 3 расположены перпендикулярно друг к другу для уменьшения ,сигнала от генератора 4 в катушке 3 на частотах, не совпадающих с частотой магнитоакустического резонанса.Принцип действия устройства...
Способ измерения приращения потока магнитной индукции

Номер патента: 168384
Опубликовано: 01.01.1965
Автор: Тарасов
МПК: G01R 33/16
Метки: индукции, магнитной, потока, приращения
...положительных считывающих импульсов и разных отрицательных записывающих импульсов. Кроме того, синхронизатор 1 вырабатывает ключевые импульсы, управляющие электронными ключами б, б и 7 в соответствующих измерительных каналах. Эти импульсы имеют частоту 2 Р. В каждом канале за один период частоты Р электронный ключ включается дважды так, что одно включение совпадает с соответствующим считывающим импульсом, а следующее - приходится на свободную часть периода перемагничивающих импульсов. Сигнал с выхода каждого электронного ключа б, б и 7 подается на отдельный резонансный вольтметр 8, 9 и 10 потока магнитной индукции. При отсутствии напряжения на измерительной обмотке 11 сердечника 4 на выходе каждого электронного ключа имеется какое-то...
Предыдущий патент: Устройство компенсации паразитныхмагнитных полей b стандартных mepax
Следующий патент: Способ измерения слабых магнитныхполей
Случайный патент: Устройство для изменения направления движения воздушного потока на обратное в сушильной камере