Способ измерения составляющих гра-диента bektopa магнитной индукции
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
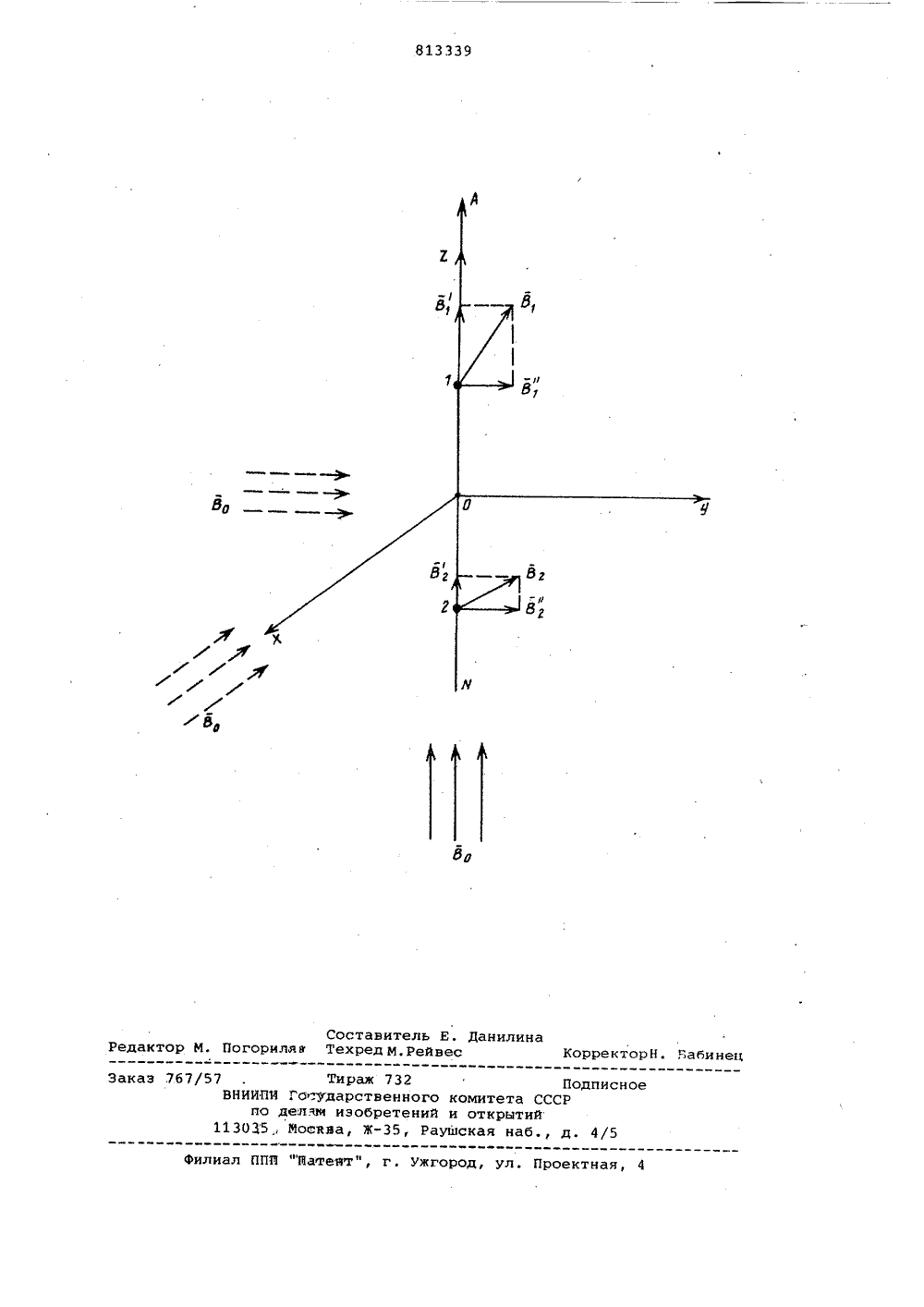
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВМДЕТИЛЬСТВУ Союз Советских Социалистических Республик(51)М. Кл З С 01 й 33/02 Государственный комитет СССР по делам изобретений и открытийДата опубликования описаймя 150 381(72) Авторы изобретен О.В. Афана П. Наумо о аявители ЕНТА 4) СПОСОБ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИ л змеочесеИзобретение относится к ите ь ной технике и предназначен и рения составляющих градиен т ра магнитной индукции, с ц иределения составляющих век агнитного момента источника ного поля.Известен способ измерения составляющих градиента вектора магнитной индукции, основанный на измерении направленными магнитометрическими преобразователяьж разности проекций вектора магнитной индукции на параллельные или соосные оси этих преобразователей в точках пространства. Устройство, реализующее данный способ, содержит два соосных однокомпонентных магнитометрических преобразователя, измеряющих разности проекций векторов магнитной индукции на оси этих преобразователей. По отношению этих разностей к расстоянию между магнитометрическими преобразователями судят о составляющих градиента вектора магнитной индукции 1.Недостатком известного способа является низкая точность измерения составляющих градиента вектора магнит ной индукции, которая обусловлена влиянием геомагнитного поля на результат измерения. Так, например принепараллельности осей магнитометриких преобразователей в 5 угловых скунд и при наличии поперечного однородного магнитного поля в 50000 нТпогрешность измерения составляющихградиента вектора магнитной индукциисоставляет примерно 1 нТ.Известен также способ определениясоставляющих градиента вектора магнитной индукции модульными магнитометрическими преобразователями, который основан на измерении модульнымимагнитометрическими преобразователя ми разности магнитной индукции в точках пространства в направлении оси,проходящей через центры преобразователей. Устройство, реализующее данный способ, содержит два модульных, 20 например квантовых магнитометрических преобразователя, измерякхдие разность магнитной индукции. По отношению этой разности к расстоянию междупреобразователями определяют составляющие градиента вектора магнитнойиндукции 2.Недостатком известного способа является то, что он обеспечивает измерение составляющих градиента вектора 30 магнитной индукции только в том слу 81333910 чае, когда однородного магнитного поля нет, а вектор магнитного моментаисточника магнитного поля направленвдоль упомянутой оси преобразователей или перпендикулярен ей. При наличии однородного геомагнитного поляи его вариаций известный способ обеспечивает измерение составляющих гра,циента модуля вектора магнитной индукции, приближенное значение которых определяется иэ соотношения в 1 в,фв,(- в +т 1,эе, - ьЕ-где В - модуль вектора магнитной индукции В; В - вектор геомагнитного 15 поля; В и В- векторы магнитной индукции, созданные источником магнитного поля в измеряемых точках пространства; 61 в расстояние между магнитометрическими преобразователями; 20 1 - направление оси, проходящей через центры преобразователей. Из данного соотношения видно, что известный способ несет информацию только о составляющих градиента модуля вектора магнитной индукции и не дает информации о составляющих градиента вектора магнитной индукции, что также является недостатком известного способа и реализующего его устройства.Цель изобретения - повышение точности измерения.Цель достигается тем, что в способе определения составляющих градиента вектора магнитной индукции, основанном на измерении разности магнитной индукции в точках пространства в направлении базовой оси, проходящей через центры преобразователей, на преобразователи воздействуют сильным 40 однородным магнитным полем, ориентируют базовую ось поочередно вдоль вектора сильного однородного магнитного поля и в двух взаимно ортогональных направлениях, каждое из которых перпендикулярно вектору сильного однородного магнитного поля, дважды изменяют ориентацию вектора сильного однородного магнитного поля в направлениях ортогональных друг другу и первоначальному, при каждом направлении сильного однородного магнитного поля ориентируют базовую ось поочередно в трех направлениях, каждое из которых параллельно одной из первоначальных ориентаций упомянутой оси, при этом .измерения разностей магнитных индукций осуществляют после каждой ориентации базовой оси.На чертеже изображены модульные магнитометрические преобразователи д) в прямоугольной системе координат и воэдействукицие на них магнитные поля индукции в точках измерения.Согласно способу вектор сильного однородного магнитного поля 5 на- у правлен вдоль базовой оси Ай, проходящей через центры модульных .преобразователей 1 и 2, прй этом ось АМ ориентирована вдоль оси 02 прямоугольной системы координат М, У, 2. Расстояние между преобразователями 1 и 2 равно значению 1 . На преобразователи 1 и 2 действуют магнитные поля В и 8 а созданные источником магнитного поля. Вектор В разложен на два ортогональных вектора В и Ва,.один из которых (В ) совпадают с осью Ай, а другой (8 ) - перпендикулярен к ней. Вектор В разложен,на два ортогональных вектора В и В,один из которых (В 2. ) совпадает с осью Ай, а другой (ВЙ ) - перпендикулярен к ней.Преобразователи 1 и 2 измеряют модули векторов магнитной индукции 81 р В)р, значения которых определяют из соотношенийВ р В +й В р в +ВПо.отношению Разности Вр и Ь)р к В, определяют составляющую градиенту век. ,тора магнитной индукции В в точке О по направлению оси 02, значение которой равноДВ 7 1 р-Вр ДВ 7а ай 5) = - а) ) - -) - )б 7 32 Е /О 2 Е /ОХ Таким образом, при воздействии сильного однородного магнитного поля Вна модульные магнитометрические преобразователи 1 и 2, каждый из нихреагируют на проекцию результирующего вектора магнитной индукции Врили 82 р на направление упомянутоговектора 80, т.е. модульные преобразователи 1 и 2 становятся в этом случаекомпонентными. При этом, чем В, больше В и В, тем меньше влияние поперечных полей В и В . Если В ) В иВ ) 8,), то влиянием В и Въ можнопренебречь. Действительно, при заданном динамическом диапазоне измерениямагнитйой индукции каждым преобразователем 1 и 2 можно воспроизвестиВб такого значения, что погрешность,обусловленная влиянием поперечных магнитных полей, будет меньше порога чувствительностей преобразователей, аследовательно повысится точность иЗмерения упомянутых составляющих. Определив - изменяют направлениеЗВ37.оси Ай с расположенными на ней преобразователями 1.и 2 так, чтобы эта ось совпала с осью ОМ( и определяют составляющую градиента вектора магнитной индукции Г в точке О по направлению оси ОХ, значение которой Определив изменяют направлениеоси Ай с расположенными на ней преобразователями 1 и 2 так чтобы эта ось совпадала с осью ОУ и определяют составляющую градиента вектора магнитной индукции В в точке О по на- правлению оси ОУ, значение которойЭЬ /дВъ равно р.сп 3 (В) - = - =- ) -5о оч= ач Е )очавхДля определения составляющихЭх авх эвхградиента вектора магнитной индукции в точке О вектор Вонаправля ют вдоль оси Ох(, а ось Ай с преобразователями 1 и 2 поочередно ориентируют в трех направлениях вначале вдоль оси ОМ, а затем - вдоль осей ОУ и О, при этом измерение разнос тей магнитной индукции осуществляют после каждой очередной ориентации оси Ай. По отношению разностей магнитной индукции к 1 определяют упомянутые составляющие. Для определения со Оэьу эвз дВуставляющих " , ,градиента вектора магнитной индукции в точке О вектор Во направляют вдоль оси ОУ, а ось АМ с преобразователями 1 и 2 по очередноориентируют в трех направлениях - вначале вдоль оси ОХ, а затем вдоль осей ОУ и ОЕ, при этом измерения разностей магнитной индукции осуществляют после каждой очередной ориентации оси Ай. По отношению разностей магнитной индукции к 2 определяют упомянутые составляющие.Способ может быть реализован с помощью известного устройства, содержащего штангу с расположенными на ее концах двумя квантовыми магнитометрическими преобразователями, каждый из которых реагирует на модуль вектора магнитной индукции. Ориентируя штангу с преобразователями поочередно в Щ трех направлениях - вначале вдоль вектора геомагнитного поля В, а затем - в двух взаимно ортогональных направлениях, каждое из которых перпендиКулярно вектоРУ В , измеРяют Разнос ти магнитных индукций между упомянутыми преобразователями после каждой очередной ориентации штанги с данными преобразователями. По отношению разностей магнитной индукции к расстоянию между квантовыми преобразователями определяют три составляющие градиента вектора магнитной индукции. Измерение трех составляющих градиента вектора магнитной индукции уже обеспечивает возможность определения Ю вектора магнитного момента источника магнитного поля по известным расстоянию до этого источника и направлению на него, что имеет актуальное значение в различных областях науки и техники, например в геофизике, навигации, медицине, биологии и т.д.Таким образом, предлагаемый способ, в отличие от известных, обеспечивает измерение составляющих градиента вектора магнитной индукции с высокой точностью как в геомагнитном поле, так и при отсутствии его, например в космическом пространстве, в магнитных экранах и т.д. Кроме того, в способе отсутствует влияние на результат измерения (однородного или неоднородного) поперечного магнитного поля, что обеспечивает повышение точности измерения составляющих градиента вектора магнитной индукции более чем на порядок.Формула изобретенияСпособ измерения составляющих градиента вектора магнитной индукции, .основанный на измерении разности маггитной индукции в точках пространства в направлении базовой оси, проходящей через центры преобразователей,о т л и ч а ю щ и й с я тем, что, сцелью повышения точности измерения напреобразователи воздействуют сильнымоднородным магнитным полем, ориентируют базовую ось поочередно вдольвектора сильного однородного магнитного поля и в двух взаимно ортогональных направлениях, каждое из которыхперпендикулярно вектору сильного однородного магнитного поля, дважды изменяют ориентацию вектора сильногооднородного магнитного поля в направлениях ортогональных дру" другу и первоначальному, при каждом направлениисильного однородного магнитного поляориентируют базовую ось поочередно втрех направлениях, каждое иэ которых параллельно одной из первоначальных ориентаций упомянутой оси, при этом изме- .рения разностей .магнитных индукцийосуществляют после каждой ориентациибазовой оси.Источники информации,принятые во внимание при экспертизе1. Патент США Р 3286169, кл. 32443, 19692. Афанасьев Ю.В. и др. Магнитометрические преобразователи, приборы,установки. Л., "Энергия"., 1972,с. 227-228.813339 в,Составитель Е. Данилинедактор М. Погориляв Техред М.Рейвес орректорН. Бабине каз 767 одписное лиал ППИ "йатеят", г. Ужгород, Ул. Проектна НИИПЙ Ро"уд по делми 13035,; Иоскв раж 732рственного комитета ССэобретений и открытийЖ, Раушская наб.,
СмотретьЗаявка
2777111, 07.06.1979
ПРЕДПРИЯТИЕ ПЯ А-1742
АФАНАСЬЕВ ЮРИЙ ВАСИЛЬЕВИЧ, СМИРНОВ БОРИС МИХАЙЛОВИЧ, НАУМОВ АНАТОЛИЙ ПЕТРОВИЧ
МПК / Метки
МПК: G01R 33/02
Метки: bektopa, гра-диента, индукции, магнитной, составляющих
Опубликовано: 15.03.1981
Код ссылки
<a href="https://patents.su/4-813339-sposob-izmereniya-sostavlyayushhikh-gra-dienta-bektopa-magnitnojj-indukcii.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения составляющих гра-диента bektopa магнитной индукции</a>
Способ измерения скоса легкой оси анизотропии магнитной пленки на цилиндрической подложке

Номер патента: 636564
Опубликовано: 05.12.1978
Авторы: Ильин, Коперсако, Костылев, Сергеев
МПК: G01R 33/12
Метки: анизотропии, легкой, магнитной, оси, пленки, подложке, скоса, цилиндрической
...ось цилиндрической поверх- переходными процессами при разрушающем ности магнитной пленки расположена водействии, при количестве тактов горизонтально и значение записанной 10 -10 начинается переход в насыщеэинфоРмации таково, что на ближнейние, Верхняя граница 10 определяетГ 0 вк наблюдателю поверхности магнитной ся допустимой длительностью цикла,пленки, небольшой участок которой Наиболее оптимальная величина коли- обозначен цифрой 1 (фиг. 1), верти- чества тактов лежит в диапазоне 10кальная составляющая 5 намагниченности направлена вверх. Обозначим угол,Зависимость степени разрушения который составляет легкая ось 3 с от величины импульса внешнего магнит- окружностью 2 нормального сечения ного поля имеет монотонный характер,...
Сверхпроводящая магнитная система со стабилизацией магнитного поля

Номер патента: 346758
Опубликовано: 01.01.1972
Авторы: Кохановский, Шахтарнн
МПК: H01F 6/00
Метки: магнитная, магнитного, поля, сверхпроводящая, стабилизацией
...ток В корОткозяхКнт 01 Обмотке устр 01 ства для стабилизации цс достигнет критического значения. ма сть Свсрхпроводящая магнитная абилпзаццсй мачштцого пол стема со состоящая тносится к области электр Изобретение оо.техники.Известны сверхпроводящие магнитные системы со стабилизацией магнитного поля, состоящие из сверхпроводящей оомотки, которая служит для создания магнитного поля,свсрхпроводящей перемычки, замыкающейсверхпроводящую обмотку накоротко, и теплового ключа для размыкания сверхпроводящейобмотки. 10Для стабилизации магнитного поля в рабочем объеме системы в предлагаемую системувведен дополнительный короткозам кнуты йсверхпроводящий контур с тепловым ключом,индуктивцо связанный со сверхпроводящей обмоткой магнитной системы,На...
Установка для магнитной обработки металлов импульсным магнитным полем

Номер патента: 468674
Опубликовано: 30.04.1975
Авторы: Белый, Конотоп, Леонтьев, Фертик
МПК: B21D 26/14
Метки: импульсным, магнитной, магнитным, металлов, полем
...для монтажа индуктора, который выполнен в виде запрессованной в пластмассу 4 спирали 5. Последняя контактирует со стаканом 6 и контактным выводом 7, разделенными изоляционной трубкой 8, Спираль охватывает изоляционную втулку 9, в которую загружаются обрабатываемые детали, Контактный вывод 7 имеет внутреннюю коническую фаску, к которой своей внешней фаской прижимается верхний электрод 10. Прижатие осуществляетсяпружиной 11, установленной между шайбами5 12 и 13. На изоляционной шайбе 13 установлен нижний электрод 14, к которому подходят кабели 15. В центральном отверстии электрода 14 смонтирован поджигающий электрод16, отделенный от основного электрода изоля 10 ционной втулкой 17,Для повышения стойкости электроды разрядника...
Устройство для магнитно-импульсной обработки полых заготовок
Номер патента: 1651428
Опубликовано: 27.05.2000
Авторы: Мышкин, Самохвалов, Юсупов
МПК: B21D 28/14
Метки: заготовок, магнитно-импульсной, полых
Устройство для магнитно-импульсной обработки полых заготовок, содержащее отдельные конденсаторные батареи, разрядно-коммутирующие устройства, каждое из которых соединено с отдельной конденсаторной батареей, индуктор, соединенный с конденсаторными батареями, и блок управления разрядно-коммутирующими устройствами, отличающееся тем, что, с целью снижения технологической себестоимости изготовления деталей за счет повышения ресурса работы конденсаторных батарей, индуктор выполнен в виде концентратора магнитного потока и первичных рабочих обмоток, намотанных параллельно на внешней поверхности концентратора по всей длине последнего, при этом каждая первичная рабочая обмотка соединена с отдельной...
Устройство для магнитно-импульсной штамповки полых заготовок

Номер патента: 1759504
Опубликовано: 07.09.1992
Авторы: Козлов, Лебедев, Самохвалов
МПК: B21D 26/14
Метки: заготовок, магнитно-импульсной, полых, штамповки
...ей, Управление запуском разрядников 2 и 4 и зарядкой накопителя 1 осуществляется с блока управления 7, Формообразование заготовки 8 производится по штампоаой оснастке (матрице) 6,Устройство работает следующим образом. После заряда емкостного накопителя 1 до определенного ранее уровня энергии, по сигналу с блока управления 7 подается а первый разрядник 2 высоковольтный поджигающий импульс, который ионизирует пространство между электродами разрядника и вызывает электрический пробой воздушного промежутка между ними, При пробое разрядника запасенная в конденсаторах энергия в виде импульса тока проходит чере рабочую обмотку индуктора 3, создает вокруг нее мощное переменное магнитное поле, индуктирующее в электро- проводной заготовке...
Предыдущий патент: Устройство для компенсации помехв образцовых mepax магнитной индукции
Следующий патент: Устройство для измерения напряжен-ности магнитного поля
Случайный патент: Самосмазывающаяся композиция