Способ измерения параметров магнитного поля
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 779951
Автор: Смирнов
Текст
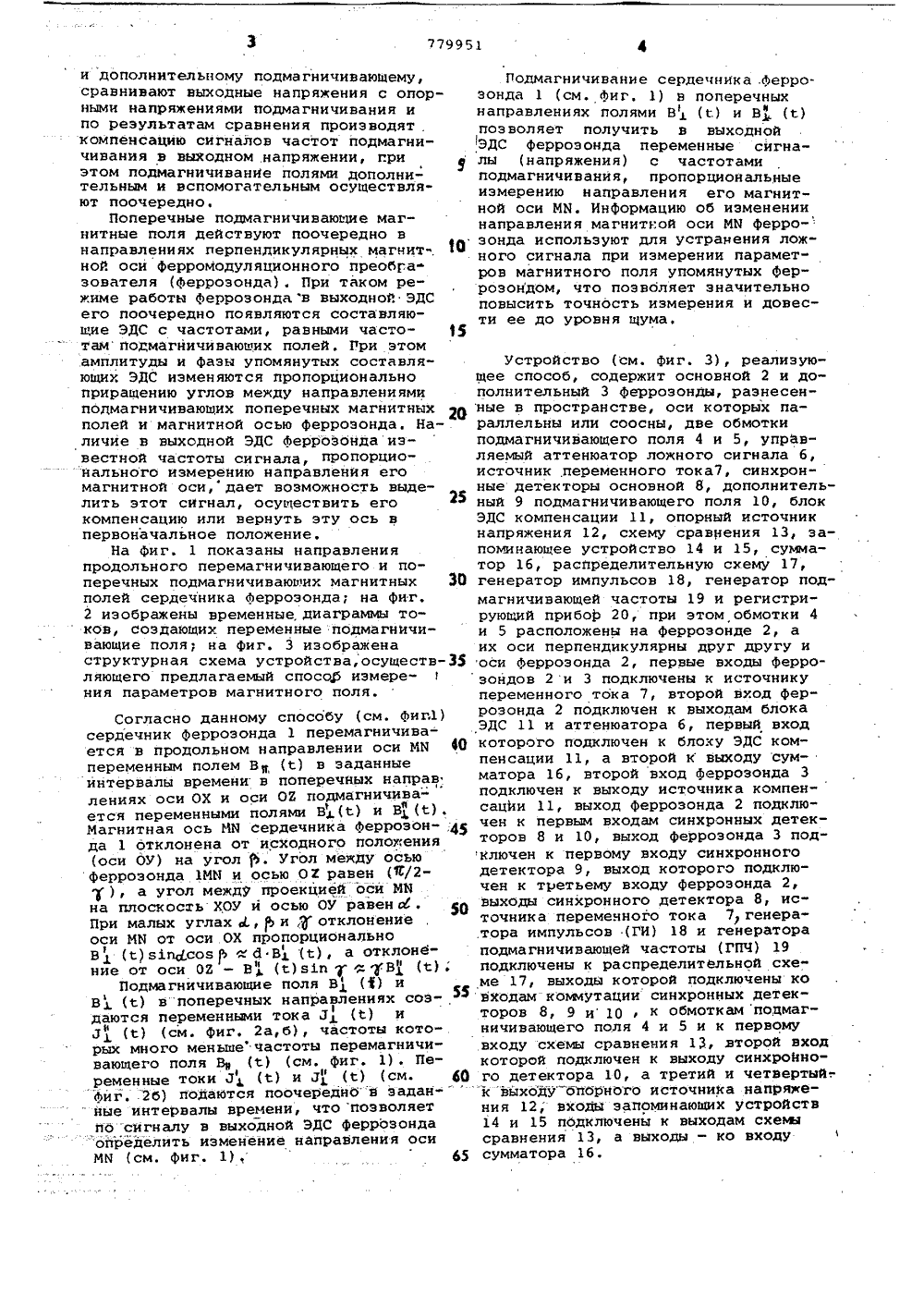
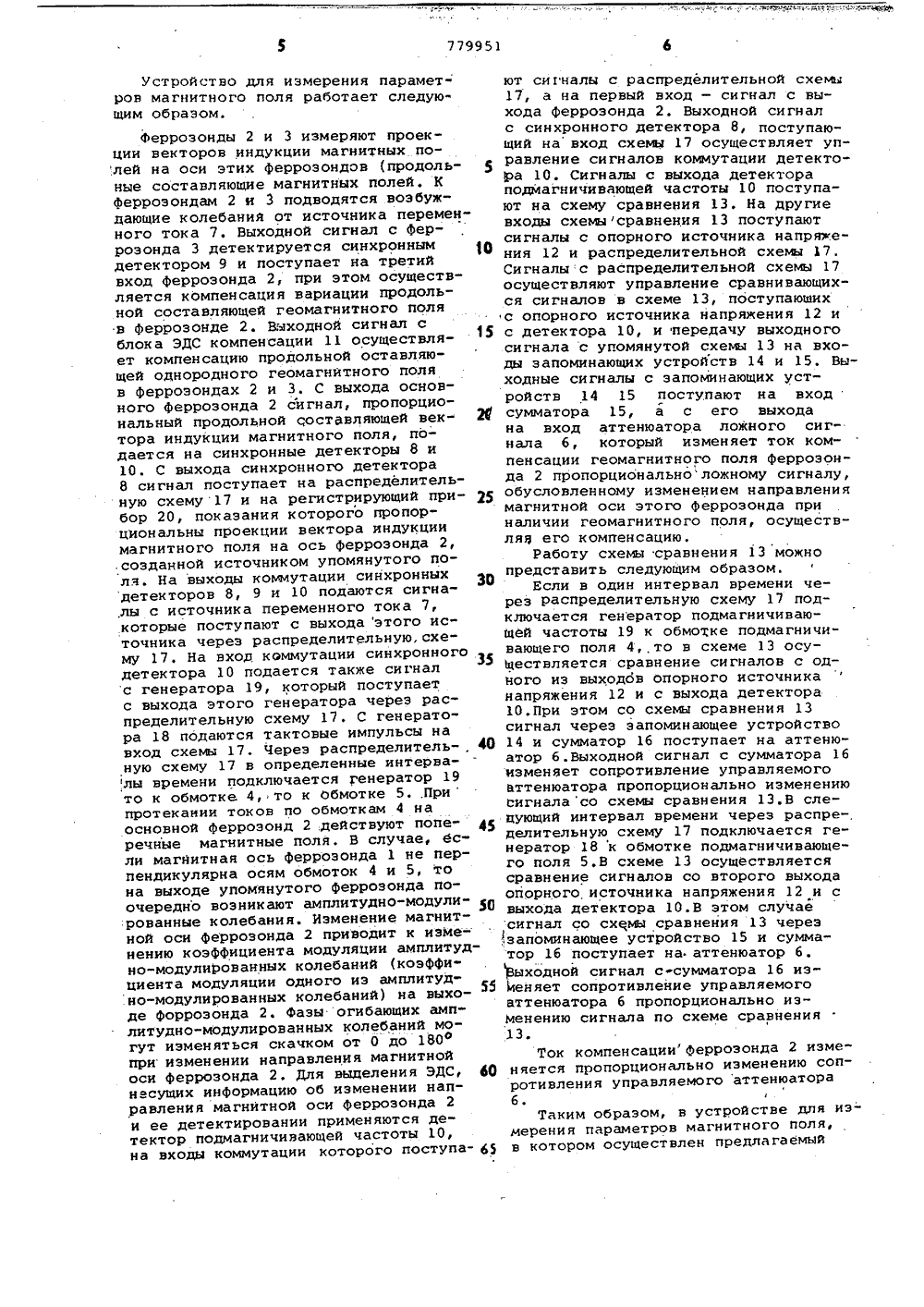
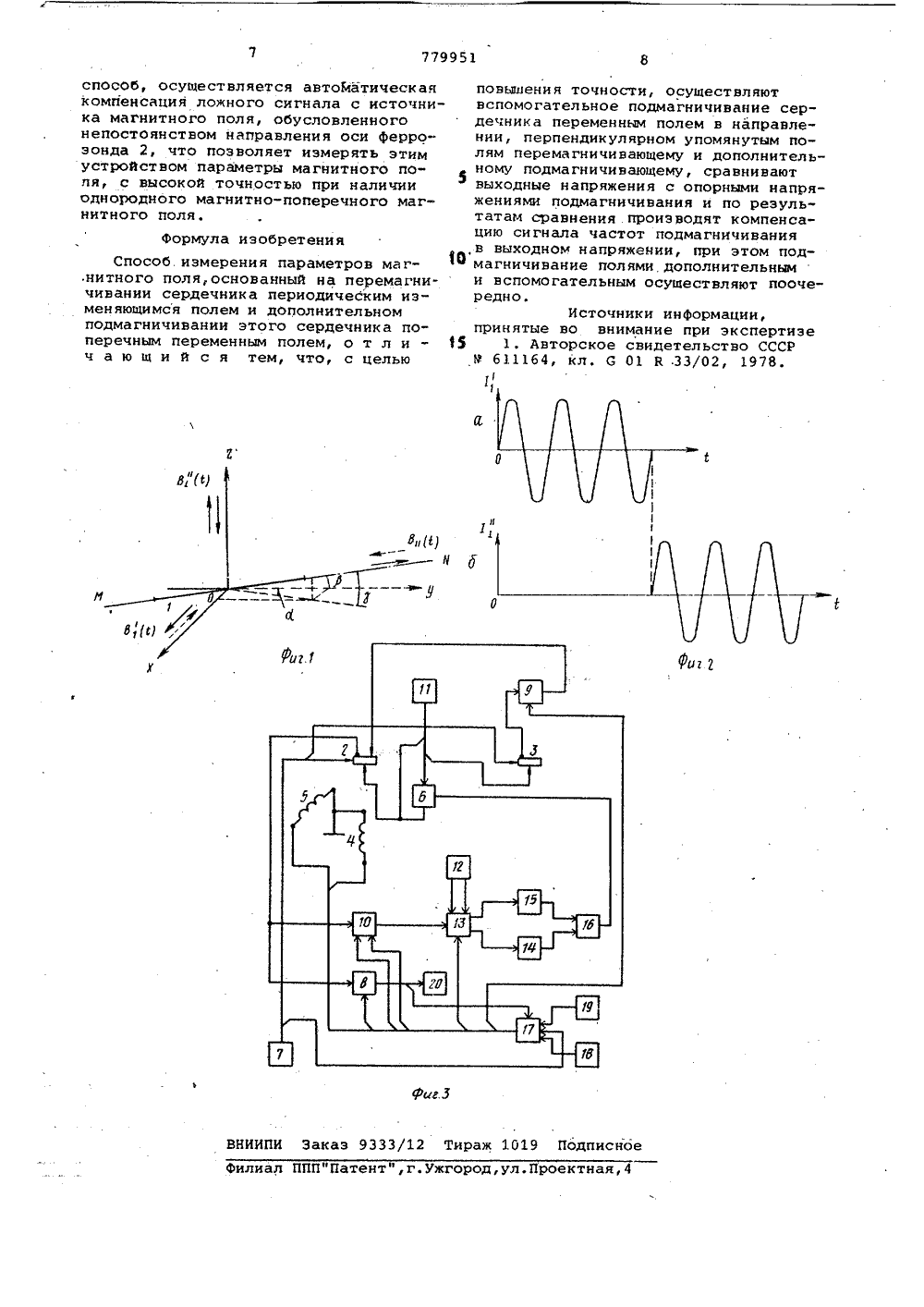
Союз Советских Социалистических Республик(22) Заявлено 04.1278 (21) 2690493/18-21 151) М3 с присоединением заявки йо(23) Приоритет С 01 В 33/02 Государственный комитет СССР но делам изобретений н открытийОпубликовано 15,1180, Бюллетень 14942 Дата опубликования описания 15.1180(.54) СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ Настоящее изобретение относится к области измерительной техники и предназначено для измерения параметров магнитного поля (вектора магнитной индукции, градиента магнитной индукции и т.д.),Известен способ измерения параметров маг(итного поля, основанный на перемагничивании сердечников феррозондов периодически изменяющимся полем и дополнительным подмагничиванием этих сердечников импульсным поперечным полем; причем импульсы одного знака этого поля подают в промежуток времени от 1/4 до 1/2 периода основной волны перемагничивающего поля, а импульсы другого знака - в промежуток времени от 3/4 до полного периода основной волны перемагничивающего поля, при этом частота следования подмагничивающих импульсов равна или больше частоты перемагничивающего поля (1.Недостатком данного способа является наличие в выходной ЭДС ферроэонда случайных погрешностей, возникающих из-за непостоянства положения его магнитной оси, т.е. погрешностей, которые появляются при действии на продольные оси сердечников ферроэонда проекции поперечного поля,Непостоянство положения магнитной оси ферроэонда может быть обусловлено механическими, электрическими, тепловыми и5 другими влияниями, В известном способе непрерывное подмагничивание сердечников.феррэзонда поперечным полемв одном направлении не обеспечиваетвоэможности повышения точности изме 10 рения параметров магнитного поля воднородном магнитном поле из-за нестабильности направления магнитнойоси упомянутого ферроэонда, так каксигналы, пропорциональные изменениюнаправления магнитной оси феррозонда,не могут быть выполнены,Пель изобретения - повышение точности измерения параметров магнитногополя.Эта цель достигается тем, что впредлагаемом способе измерения параметров магнитного поля, основанном наперемагничивании сердечника периодическим изменяющимся полем и дополни 25 тельном подмагничивании этогосердечника поперечным переменным полем, осуществляют вспомогательноеподмагничивание сердечника переменнымполем в направлении, перпендикулярном30 упомянутым полям перемагничивающемуи дополнительному подмагничивающему,сравнивают выходные напряжения с опорными напряжениями подмагничивания ипо результатам сравнения производят .компенсацию сигналов частот подмагничивания в выходном напряжении, гриэтом подмагничивание полями дополнительным и вспомогательным осуществляют поочередно,Поперечные подмагничивающие магнитные поля действуют поочередно внаправлениях перпендикулярных магнит, Йной оси ферромодуЛяционного преобразователя (Ферроэонда). При таком режиме работы Феррозонда в выходной ЭДСего поочередно появляются составляющие ЭДС с частотами, равными частотамподмагничиваюших полей. При этомамплитуды и фазы упомянутых составляющих ЭДС изменяются пропорциональноприращению углов между направлениямиподмагничивающих поперечных магнитныхполей и магнитной осью ферроэонда. Наличие в выходной ЭДС Феррозбнда известной частоты сигнала, пропорцио нального измерению направления егомагнитной оси, дает возможность выделить этот сигнал, осуществить егокомпенсацию или вернуть эту ось впервоначальное положение.На Фиг. 1 показаны направленияпродольного перемагничивающего и поперечных подмагничиваюших магнитных 30полей сердечника Феррозонда; на фиг.2 изображены временные диаграммы токов, создающих переменные подмагничивающие поля; на фиг. 3 изображенаструктурная схема устройства,осуществ ляющего предлагаемый способ измерения параметров магнитного поля. Согласно данному способу (см. Фиг 1) сердечник Феррозонда 1 перемагничивается в продольном направлении оси МИ 0 переменным полем Вцв заданные интервалы времени в поперечных направ лениях оси ОХ и оси ОЕ подмагничива- ется переменными полями Вг.(1) и В. Магнитная ось МЯ сердечника Феррозон-,45 да 1 отклонена от исходного положения(оси ОУ) на угол. Угол между осью феррозонда 1 МБ и осью ОХ равен (Й/2- ), а угол между проекцией оси МВ на плоскость ХОУ и осью Оу равенств . При малых углах 4и Яотклонение оси МБ от оси ОХ пропорционально в 1з 1 псозх 4 В , а отклоненйе от оси ОЕ - В (с)з 1 п уВ 1 ;Подмагничивающие поля В (4) и вв поперечных направлениях соэ 1даются переменными тока Ли д 1(см. Фиг. 2 а,б), частоты которйх много меньше частоты перемагничивающего поля В(см. Фиг. 1), Переменные токи дди д (с) (см. 40 Фиг. "2 б) подаются поочередно в задан" ные интервалы времени, что позволяетпо сигналу в выходной ЭДС феррозонда определить изменение направления осиМи (см. Фиг. 1),65 Родмагничивание сердечника .Ферроэонда 1 (см, Фиг, 1) в поперечных направлениях полями В 1 (е.) и Впозволяет получить в выходной ЭДС Феррозонда переменные сигналы (напряжения) с частотами подмагничивания, пропорциональные измерению направления его магнитной оси МИ. Информацию об изменении направления магниткой оси МИ ферро-: эонда используют для устранения ложного сигнала при измерении параметров магнитного поля упомянутых Феррозондом, что поэвбляет значительно повысить точность измерения и довести ее до уровня щума,Устройство (см. Фиг. 3), реализующее способ, содержит основной 2 и дополнительный 3 Феррозонды, разнесенные в пространстве, оси которых параллельны или соосны, две обмотки подмагничивающего поля 4 и 5, управляемый аттенюатор ложного сигнала 6, источник, переменного тока 7, синхронные детекторы основной 8, дополнительный 9 подмагничивающего поля 10, блок ЭДС компенсации 11, опорный источник напряжения 12, схему сравнения 13, запоминающее устройство 14 и 15, сумматор 16, распределительную схему 17, генератор импульсов 18, генератор подмагничивающей частоты 19 и регистрирующий прибор 20, при этом обмотки 4 и 5 расположены на феррозонде 2, а их оси перпендикулярны друг другу и оси Феррозонда 2, первые входы Феррозондов 2 и 3 подключены к источнику переменного тока 7, второй вход феррозонда 2 подключен к выходам блока ЭДС 11 и аттенюатора 6, первый вход которого подключен к блоху ЭДС компенсации 11, а второй к выходу сум" матора 16, второй вход Феррозонда 3 подключен к выходу источника компенсации 11, выход феррозонда 2 подключен к первым входам синхронных детекторов 8 и 10, выход феррозонда 3 подключен к первому входу синхронного детектора 9, выход которого подключен к третьему входу ферроэонда 2, выходы синхронного детектора 8, источника перемечного тока 7 генера.тора импульсов (ГИ) 18 и генератора подмагничивающей частоты (ГПЧ) 19 подключены к распределительной схеме 17, выходы которой подключены ко входам коммутации синхронных детекторов 8, 9 и 10к обмоткам подмагничивающего поля 4 и 5 и к первому входу схемы сравнения 13, второй вход которой подключен к выходу синхройного детектора 10, а третий и четвертый-. к выходу бпорного источника напряжения 12; входы запоминающих устройств 14 и 15 подключены к выходам схемы сравнения 13, а выходы - ко входу сумматора 16.Устройство для измерения параметрон магнитного поля работает следующим образом. Феррозонды 2 и 3 измеряют проекции векторов индукции магнитных полей на оси этих ферроэондов (продольные составляющие магнитных полей, К феррозондам 2 и 3 подводятся возбуждающие колебания от источника переменного тока 7. Выходной сигнал с феррозонда 3 детектируется синхроннымдетектором 9 и поступает на третийвход феррозонда 2, при этом осуществляется компенсация вариации продольной составляющей геомагнитного поляв феррозонде 2, Выходной сигнал сблока ЭДС компенсации 11 осуществляет компенсацию продольной оставляющей однородного геомагнитного поляв феррозондах 2 и 3, С выхода основного феррозонда 2 сигнал, пропорциональный продольной составляющей вектора индукции магнитного поля, подается на синхронные детекторы 8 и10. С выхода синхронного детектора8 сигнал поступает на распределительную схему 17 и на регистрирующий прибор 20, показания которого пропорциональны проекции вектора индукциимагнитного поля на ось феррозонда 2,.созданной источником упомянутого поля. На выходы коммутации синхронныхдетекторов 8, 9 и 10 подаются сигна,лы с источника переменного тока 7,которые поступают с выхода этого источника через распределительную, схе" му 17. На вход коммутации синхронногодетектора 10 подается также сигналс генератора 19, который поступаетс выхода этого генератора через распределительную схему 17. С генератора 18 подаются тактовые импульсы навход схемы 17. Через распределитель-,ную схему 17 и определенные интервалы времени подключается генератор 19то к обмотке 4, то к Обмотке 5.,Припротекании токов по обмоткам 4 наосновной феррозонд 2 .действуют поперечные магнитные поля. В случае, если магнитная ось ферроэонда 1 не перпендикулярна осям обмоток 4 и 5, тона выходе упомянутого феррозонда поочередно возникают амплитудно-модули:рованные колебания, Изменение магнитной оси ферроэонда 2 приводит к иэменению коэффициента модуляции амплитуд но-модулированных колебаний (коэффициента модуляции одного из амплитудно-модулированных колебаний) на выходе форроэонда 2, фазы огибающих амплитудно-модулированных колебаний могут изменяться скачком от 0 до 180о при изменении направления магнитной оси феррозонда 2, Для выделения ЭДС, несущих информацию об изменении направления магнитной оси ферроэонда 2 и ее детектировании применяются детектор подмагничинающей частоты 10, на входы коммутации которого поступают сигналы с распределительной схемы17, а на первый нход - сигнал с выхода феррозонда 2. Выходной сигналс синхронного детектора 8, поступающий на вход схемы 17 осуществляет управление сигналов коммутации детектора 10. Сигналы с выхода детектораподмагничивающей частоты 10 поступают на схему сравнения 13. На другиевходы схемы сравнения 13 поступаютсигналы с опорного источника напряжения 12 и распределительной схемы 17.Сигналы с распределительной схемы 17осуществляют управление сравнивающихся сигналов в схеме 13, поступающихс опорного источника напряжения 12 и15 с детектора 10, и передачу выходногосигнала с упомянутой схемы 13 на входы запоминающих устройств 14 и 15. Выходные сигналы с запоминающих устройств 14 15 поступают на входЯ сумматора 15, а с его выходана вход аттенюатора ложного сигнала 6, который изменяет ток компенсации геомагнитного поля ферроэонда 2 пропорциональноложному сигналу,обусловленному изменением направлениямагнитной оси этого ферроэонда приналичии геомагнитного поля, осуществляв его компенсацию.Работу схемы сравнения 13 можнопредставить следующим образом.Если в один интервал времени через распределительную схему 17 подключается генератор подмагничинающей частоты 19 к обмотке подмагничивающего поля 4 то в схеме 13 осуществляется сравнение сигналов с одНОГО Иэ ВЫХОДОВ ОПОРного источниканапряжения 12 и с выхода детектора10.При этом со схемы сравнения 13сигнал через запоминающее устройство49 14 и сумматор 16 поступает на аттенюатор 6.Выходной сигнал с сумматора 16изменяет сопротивление управляемогоаттенюатора пропорционально изменениюсигнала со схемы сравнения 13.В следующий интервал времени через распре-,делительную схему 17 подключается генератор 18 к обмотке подмагничивающего поля 5,В схеме 13 осуществляетсясравнение сигналов со второго выходаопорного источника напряжения 12 и свыхода детектора 10.В этом случаесигнал со схемы сравнения 13 череззапоминающее устройство 15 и сумматор 16 поступает на аттенюатор 6,выходной сигнал с сумматора 16 из 53 Меняет сопротинление упранляемогоаттенюатора б пропорционально изменению сигнала по схеме сравнения13.Ток компенсации феррозонда 2 изме няется пропорционально изменению сопротивления управляемого аттенюатораб.Таким образом, н устройстве для измерения параметров магнитного поля, 65 н котором осуществлен предлагаемый779951 Формула изобретения ВНИИПИ Заказ 9333/12 Тираж 1019 Подписно Фи иал 4 ПППБПатент",г.ужгород,ул,Проектная л способ, осуществляется автоматическаякомпенсация ложного сигнала с источника магнитного поля, обусловленногонепостоянством направления оси Ферроэонда 2, что позволяет измерять этимустройством параметры магнитного по"ля, с высокой точностью при наличииоднородного магнитно-поперечного магнитного поля. Способ измерения параметров магнитного поля, основанный на перемагничивании сердечника периодическим изменяющимся полем и дополнительном подмагничивании этого сердечника поперечным переменным полем, о т л и ч а ю щ и й с я тем, что, с целью повышения точности, осуществляют вспомогательное подмагничивание сердечника переменным полем в направлении, перпендикулярном упомянутым полям перемагничивающему и дополнитель-ному подмагничивающему, сравниваютвыходные напряжения с опорными напряжениями подмагничивания и по результатам сравнения производят компенсацию сигнала частот подмагничивания ,в выходном напряжении, при этом подмагничивание полями, дополнительным и вспомогательным осуществляют поочередно. Источники инФормации,принятые во внимание при экспертизе 1 1, Авторское свидетельство СССР Р 611164, кл. С 01 й 33/02, 1978. 1
СмотретьЗаявка
2690493, 04.12.1978
ПРЕДПРИЯТИЕ ПЯ А-1742
СМИРНОВ БОРИС МИХАЙЛОВИЧ
МПК / Метки
МПК: G01R 33/02
Метки: магнитного, параметров, поля
Опубликовано: 15.11.1980
Код ссылки
<a href="https://patents.su/4-779951-sposob-izmereniya-parametrov-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения параметров магнитного поля</a>
Балансная схема сравнения

Номер патента: 267209
Опубликовано: 01.01.1970
Авторы: Кожевн, Нагайкин, Цоканов
МПК: G05B 1/02
Метки: балансная, сравнения, схема
...Ф к источнику импульсов опроса; выходного импульсного трапсформатора Тр 2, также имеющего трп обмотки, причем общая точка двух его обмоток У и Т;2, подключенных к коллекторам трапзисторов Ть Т,-, встречно (И 21 - концом, 1 р 22 - началом), соединена с пулевой шиной питаппя через резистор, третья же обмотка Услухкит выходом схемы.Схема работает следующим образом.Ток коллектора Т, распределяется между плечами первого балансцого каскада (Та и Т,) в функции разности абсолютных значений напряжений С/, и Уь подаваемых ца входные клеммы А и Й схемы сравнения, В соответствии с этим устанавливаются токи в коллек267209 пакт Заказ 199611 Ц 11 И 11 И Комитетапри СовМоскваКТипография, пр, Сапунова, 2 3торных цепях транзисторов Т 4 и Т протекающие...
Схема сравнения

Номер патента: 328451
Опубликовано: 01.01.1972
Автор: Чехонин
МПК: G05B 1/01
...предлагаемая схема сравнения.10 Схема состоит пз балансного диодно-регенератпвного компаратора, выполнетшого на основе блокпнг-генератора, содержащего транзистор 1 и триггера, выполненного на основе транзисторов 2 и 3.15 Предположим в начале работы транзистор 2 триггера находится в выключенном состоянии, а транзистор 3 во включенном состоянии. В этом случае па коллекторе транзистора 2 находится высокое напряжение, которое 20 вызывает запирапие диода 4, в результатеэтого через резистор б в базу транзистора 6 течет ток, который усиливается пм в р раз.Поскольку транзистор 3 находится в включенном состоянии через него протекает ток, по ступающий от источника питания Е, через резистор 7 и диод 8, причем величина этого тока может быть в Р раз...
Способ измерения параметров плазмы в магнитном поле

Номер патента: 1072635
Опубликовано: 07.03.1988
Автор: Жуковский
МПК: G21B 1/00
Метки: магнитном, параметров, плазмы, поле
...и широко применяетснв диагностике высокотемпературнойплазмы на установках "Токамак", таккак позволяет достаточно просто инадежно определять поведение в пространстве и во времени одного иэ важнейших параметров плазмы - ее плотности.Однако известный интерферометрический способ не позволяет измерять 45другой важный параметр плазмы, аименно величину и распределение впространстве полоидального магнитного поляили, что то же самое, распределение тока в плазме. Это являет" 5ся следствием того, что используетсяэлектромагнитная волна только с одйой поляризацией, и обычно точностьизмерения сдвигов фаз невысока.Целью изобретения является осуществление измерений попоидальногомагнитного поля в плазме. Для этогов способе измерения параметров плазмы в...
Источник магнитного поля для геоэлектроразведки

Номер патента: 1095121
Опубликовано: 30.05.1984
Авторы: Постельников, Прис, Сущев
МПК: G01V 3/10
Метки: геоэлектроразведки, источник, магнитного, поля
...- повышение эф фективности путем увеличения магнитного момента. ного напряжения введена дополнительная цепь из последовательно соединенных катушки индуктивности и конденсатора, причем катушки индуктивности обеих цепей индуктивно связаны между собой,На чертеже представлена структурная электрическая схема источникамагнитного поля для геоэлектроразведки.Источник магнитного поля для геоэлектроразведки содержит источникпостоянного напряжения, первый и второй управляемые ключи 2 и 3, цепь изпоследовательно соединенных катушкииндуктивности 4 и конденсатора 5 идополнительную цепь из последовательно соединенных катушки индуктивности6 и конденсатора 7.Источник магнитного поля для геоэлектроразведки работает следующимобразом.Генераторный...
Схема сравнения

Номер патента: 221773
Опубликовано: 01.01.1968
Автор: Цоканов
МПК: G01R 17/00
...состоянии (на туннельном участке вольтамперной характери стики). При подаче положительного импульса опроса триод 3 открывается. Если при этом (1l(Ь)+Л, где Л, - порог чувствительности схемы сравнения), то ток коллектора триода 1 возрастает до величины, большей 30 1 макс туннельного диода, и диод 5 переключается на диффузионную ветвь характеристики туннельного диода, формируя передний фронт выходного сигнала на первом выходе.Спад импульса опроса приводит к запиранию триодов д и 1. Диод 5 при этом переключается на туннельный участок характеристики, фомируя задний фронт выходного сигнала.Лналогично работают триод 2 и туннельный диод 6 при (Сl )l,) - Л, Чувствительность схемы по выходу 1 и выходу П несколько отличается (Л,+Л) в силу...
Предыдущий патент: Устройство для калибровки магнитометра
Следующий патент: Тесламетр мгновенных значений
Случайный патент: Экстрактор корня зуба