Функциональный преобразователь для контурной системы программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 641457
Автор: Лихачев
Текст
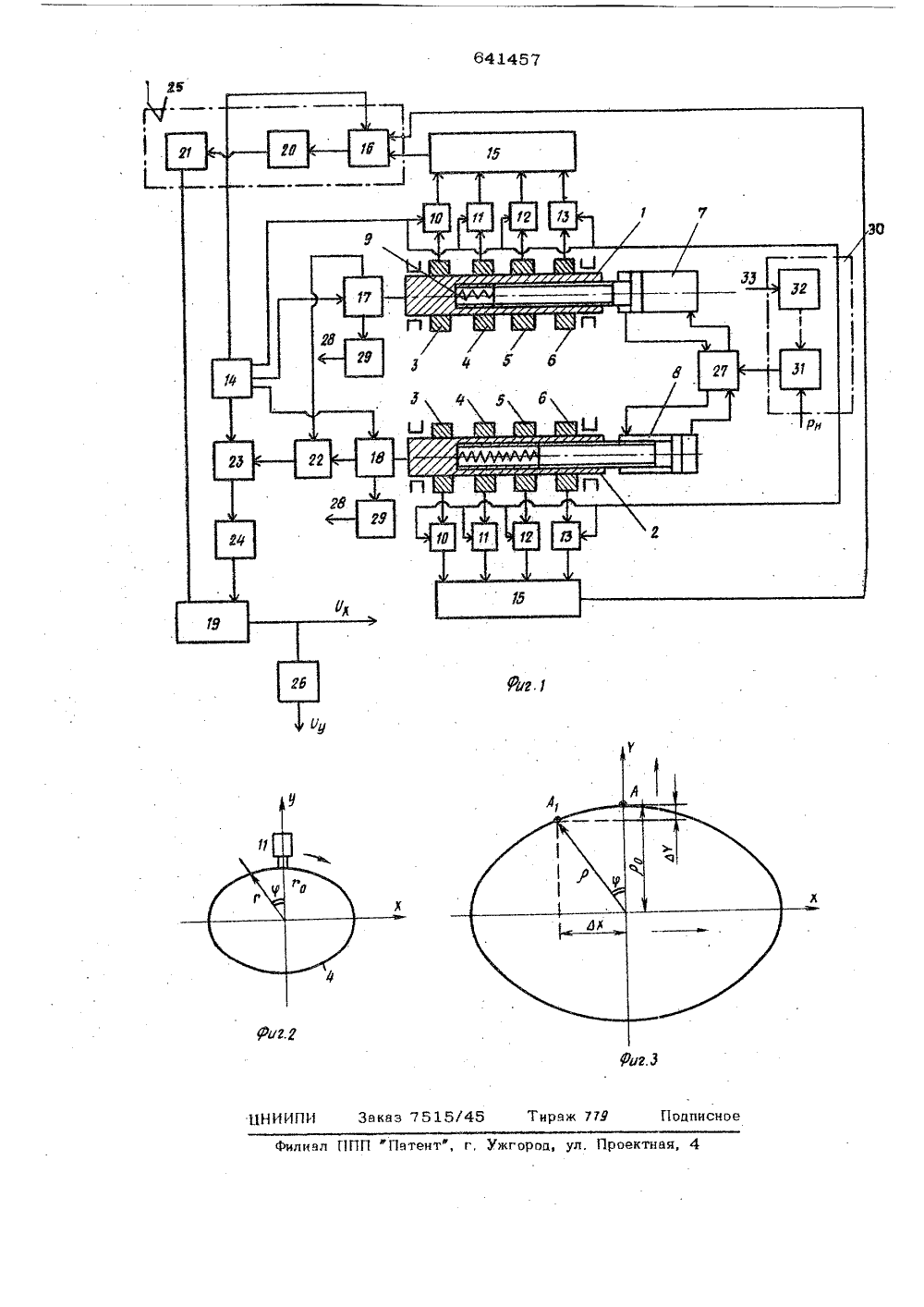
приведены геометрические зависимости траектории перемещения исполнительного органа управляемого преобразователем от угла поворота кулачковых механизмов.Функциональный преобразователь тока (фиг. 1) содержит два кулачковых механизма 1 и 2, с одинаковым общим количеством попарно одинаковых кулачков 3, 4, 5, 6. Кулачковйе механизмы 1 и 2 приводятся во вращение привода,ми поршнями гидроцилиндров 7 и 8, штоки которых снабжены винтовыми. шлицами, сопрягаемыми с соответствующими шлицами в отверстиях 9 валов кулачковых механизмов 1 и 2..Рабочие поверхности кулачков 3, 4, 5, 6 описаны по различным математическим кривым, применяемым при конструировании деталей машин, например, по окружности, расположенной эксцентрично относительно оси вращения, по эллиптической, параболической и гиперболической кривым. Эти поверхности кулачков, при вращении вада,перемещают якори индуктивным. датчиков 10, 11, 12, 13, первичные обмотки которых питаются от блока 14 током, стабилиэиро ванным по напряжению. Вследствие того, что рабочие поверхности кулачков профилированы о различным метаматическим кривым, а ввл кулачкового мех ниэма вращается равномерно, датчики выдают через коммутатор 15 на блок 16 усиления и демодуляции ток, напряжение которого изменяется по закону той математической кривой, по которой описана рабочая поверхность кулачка,Для того, чтобы стол станка перемещался но определенной криволинейной траектории, например по эллиптической, необходимо, чтобы его продольная и ло перечная подачи находились в определен ной зависимости от изменения скорости возвратно-поступательного перемещения якоря соответствующего индуктивного датчика (10 З 11, 12 или 13).Предположим, что криволинейное движение совершает не стол относительно некоторой неподвижной точки а фиксированная точка А совершает движение по заданной траектории относительно закрепленного стола (фиг. 3). При повороте кулачка 4 (фиг. 2) на угол Ч точка А должна переместиться в положение А, при этом ее координаты иэменяюэся, соответственно, на дч и на Ь Х. Изфиг. 3ду у р соьУ Р РсоьЧДХ=р ЫПЧВеличина я пропорциональна величинекулачка, которая, в свою очередь,является функцией угла его поворота.Так как ДУ = Г-Го., то Г = ГО + ЬУ.Таким образом, координатные пере 10 мешения ДУ и ЬХ точки поверхностистопа вызываются управляющими сигналами Ох и Оу приводам стола в координатных направлениях, пропорциональными перемещению якоря индуктивного дат15 чика.Сигналы ОХ и О представляют собой,соответственно, произведенияО= О О МоОУ = иО сов,2 цО- электрический сигнал, пропорциональный изменению радиуса-векторакулачкаГфГ ф ЬУо15ОМпМ и Особ%- напряжения, пропорциональные синусу и косинусу углаповорота кулачкового механизма (фиг. 1).Так квк р = Г + ДУ, где Г - постоЗф янная величина, то О "- О,О гдеоО = СОНМв О изменяется конгруф ДУэнтно по отношению к изменению скорости перемещения якоря датчика 11(фиг, 1), Так как датчик 11 выдает ситнвл Ц Г , то для учета постоянной составляющей в схеме блока 16 предусмотрен узел смешения электрического нуля.Чтобы получить электрический сигнал,пропорциональный ЫП 1 и СО 5 Чв функцио"нвльном преобразователе используютсядатчики угла поворота кулачковых механизмов, например, синусно-косинусныевращающиеся трансформаторы 17, 18.Для получения гроизведений Ц Ос,ЧП 1И О О, соб 1 в схеме преобразователя имеется блок умножения19 с двойной амплитудной модуляцией,на который подаются сигналы, от одного из индуктивных датчиков 10, 11, 12,13 через демодулятор 20, усилитель по.стоянного тока 21 и от одного из даччиков 17 или 18 .через второй коммуттор 22, усилитель 23 и демодулятор24. Блок 16, демодулятор 20 и усили,тель 21 составляют нормируюшнй преобразователь 25. Блок 19 выдает в контурную систему программного управления сигнал О управляющий скоростью25 перемещения стола станка по одной изкоординат (Х) и пропорциональной синусу угла поворота кулачка, Для получения управляющего сигнала по второйкоординате (У) на выходе электрической 5схемы преобразователя установлен дифференциатор 26, например, четырехполюсник на К-С цепочке. Выходы 0 и 0являются координатными выходами преобразователя. 1 ОДля обеспечения непрерывности криволинейных траекторий перемещения исполнительного органа станка преобразователь снабжен не одним, а двумя одинаковыми кулачковыми механизмами, гидравлическая жидкость в гидроцилиндры 7 и8 которых направляется через, реверсивный золотник 27, обеспечивающий возврат штока одного гидроцилиндра, а поэтому и кулачкового вала, в исходное положение в.то время, когда шток второго гидроцилиндра, через винтовые шлицы,вращает вал второго кулачкового механизма и с него снимается сигнал управления.Приводы подач исполнительного органа станка включаются по командам 28подаваемым усилителями 29 в моментыначала выдачи тока датчиками 17 или18.30Скорость вращения валов кулачковыхмеханизмов устанавливается и стабилизируется блоком управления скоростьюприводов 30, состоящим из дросселя 31,снабженным электроприводом 32, получающим от контурной системы программного управления команды 33 о нужныхположениях дросселя, то есть о требуемой кривизне кривой траекторного перемещения исполнительного органа станка,Жидкость к дросселю 31 подается отнасосной установки гидросистемы станка под давлением Рн,Преимушества предлагаемого преобразователя, по сравнению с интерполяторами известных цифровых систем про: -граммного управления:исключение необходимости в составлении специальных программ контурныхперемещений (высвобождение ЭВМ, программистов и, научных работников, занвмаюшихся вопросами подготовки управ ляющих программ для станков с контурными системами управления);- простота конструкции и поэтому малая стоимость изготовления, высокая надежность- исключение из систем онтурного программного управления колоссального количества электронных блоков, что дает большой экономический аффект;- повышение надежности и допговеч ности систем контурного управления и поэтому значительное повышение техни ко-экономической области его примене-, ния.Ф ормула изобретенияФункциональный преобразователь дляконтурной системы программного управления, содержащий кулачковйй механизмс приводамисвязанные с поверхностя-ми кулачковых механизмов индуктивныедатчики, выходы которых подключены кпоследовательно соединенным коммутатору и нормируюшему преобразователю,отл ичающеесятем, что,сцелью упрощения конструкции, в немустановлены датчики угла поворота кулачковых механизмов, подключенный ких выходам второй коммутатор, связанный с; выходом нормирующего преобразователя и второго коммутатора, блок умножения, и подключенный к выходу блокаумножения дифференциатор и блок управления скоростью приводов, подключенныйк входному каналу функционального преобразователя, координатные выходы которого соединены с выходами блока умножения и дифференциатора.Источники информации, принятые вовнимание при экспертизе:1. Спр. Станки с программным управлением, "Машиностроение, И., 1975,с. 80.2. Срибнер Л. А. и Шраго Л, К,Проектирование позиционных систем программного управления. М-Киев, 1962,с. 31,
СмотретьЗаявка
2406838, 23.09.1976
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА АВИАЦИОННЫЙ ИНСТИТУТ ИМ. С. ОРДЖОНИКИДЗЕ
ЛИХАЧЕВ АНДРЕЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G06G 7/06
Метки: контурной, программного, системы, функциональный
Опубликовано: 05.01.1979
Код ссылки
<a href="https://patents.su/4-641457-funkcionalnyjj-preobrazovatel-dlya-konturnojj-sistemy-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Функциональный преобразователь для контурной системы программного управления</a>
Механизм поворота дискового магазина

Номер патента: 965716
Опубликовано: 15.10.1982
Авторы: Воронков, Тоникян, Цуранов, Штейман
МПК: B23Q 7/02
Метки: дискового, магазина, механизм, поворота
...и дросселя 7 на канале 8 подачимасла через систему управления в штоковую и бесштоковую полости приводов поворота и фиксации.Устройство работает следующим образом, Через дроссель 7 канала 8 масло поддавлением подается в бесштоковую полость привода фиксации 5 и его шток своей торцевой и боковой поверхностью запирает дисковый магазин 1 по двум смежным делительным пальцам 2. Одновременно масло,попадая в штоковую полость привода поворота 3, отводит его шток с собачкой 4 вниз для зацепления с очередным пальцем 2 магазина 1. При подаче масла из магистрали в бесштоковую полость привода поворота 3 шток с собачкой поворачивает магазин 1 на шаг. При этом шток привода фиксации 5, медленно утапливаясь, демпфирует перемещение магазина...
Механизм поворота конвертера

Номер патента: 901286
Опубликовано: 30.01.1982
МПК: C21C 5/50
Метки: конвертера, механизм, поворота
...например, как изображено нафиг. 2-4. Причем перекрытие выполнено симметрично вертикальной оси А привода 1, Предпочтительно пакеты 10 и 11 собирают из пластин 12 таким образом, что первая плоская пластина 12 пакета 10 перекрывает первую пластину 12 пакета 11, вторая пластина пакета 11 перекрывает пластину пакета 10, а вторая пластина пакета 10 перекрывает вторую пластину пакета 11 и т.д, В процессе работы конвертера рычаги 2 и 3 привода 1 воспринимают реактивный момент и одновременно обеспечивают свободу перемещений привода 1 во всех направлениях, возникающих в результате несоосности геометрической оси вращения конвертера и оси цапфы, на которой он установлен, Перемещения привода 1 компенсируются поворотом рычага 2 и 3 в противоположных...
Механизм поворота рабочих органов

Номер патента: 219321
Опубликовано: 01.01.1968
Авторы: Государственное, Гронский, Губарев, Судит
МПК: A01B 63/00
Метки: механизм, органов, поворота, рабочих
...што редлагаемый осуществить а в требуемо дм ет изобрете органов, нажащий реечоторой соедиа с гидроциисч тем что гла поворота а с гидроцио переменной иальная схефиг. 2 - звещиис атого отличаювиде зуб тем, ктоИзвестные механизмы поворота рабочих ор. гаков, например, опрыскивателей, содержащие реечную передачу, зубчатое колесо которой соединено с рабочим органом, а рейка с гидроцилиндром управления, не позволяют производить поворот рабочего органа на достаточно большие углы.Цель изобретения - расширение диапазона угла поворота рабочего органа. Это достигается тем, что в предлагаемом механизме рейка соединена с гидроцилиндром управления через звено переменной длины. Выполнена рейка в виде зубчатого сектора.На фиг. 1 изображена принципма...
Механизм поворота шпиндельного блока многошпиндельного автомата

Номер патента: 733867
Опубликовано: 15.05.1980
Авторы: Бирюков, Бутаев, Крепс
МПК: B23B 9/00
Метки: автомата, блока, механизм, многошпиндельного, поворота, шпиндельного
...валика7, на одном конце его закреплена вилка 8, в паэ которой входит ролик 9, дополнительно установленный на криво- шипе 4 на оси 10. На другом конце вали733867 4пает в контакт с участком б кулачка 14 и ролик 13 начинает перемещаться вверх, а следовательно через рычаг 11, валик 7, вилку 8 и ролик 9 кривошип 4 начинает возвращаться в исходное положение. После чего цикл повторяется для каждого угла поворота мальтийского креста 18. 3( закреплен рычаг 11 в котором установлена ось 12 с роликом 13. Ролик 13 контактирует с кулачком 14 (фиг. 3) и контркулачком 15, неподвижно установленными на задней стойке 16 токарного автомата. Поворот шпиндель- ного блока 17 осуществляется от кри- вошипа 4 через установленный на нем ролик 5, мальтийский крест...
Станок для окорки и раскалывания лесоматериалов, ножевая головка для раскалывания лесоматериалов, нажимная плита механизма надвигания, окорочная фреза, механизм поворота лесоматериалов и загрузочное приспособле

Номер патента: 1009765
Опубликовано: 07.04.1983
Автор: Грозыкин
Метки: головка, загрузочное, лесоматериалов, механизм, механизма, надвигания, нажимная, ножевая, окорки, окорочная, плита, поворота, приспособле, раскалывания, станок, фреза
...секциях существуют воздушные зазоры 36 между частями бревен, На головку 2 действуютсжимающие силы от бревна (в направ 45лении стрелки 37) и силы реакции(в направлении стрелки 38) от заделок канатов (или другой какой-либоопоры, противодействующей смещениюголовки).Все горизонтальные ножи 35 имеют50верхнюю одностороннюю заготовку, т.е,лезвием вниз.По периметру ножевых корпусов31 и 32 установлены концевые выключа.тели 39, контактирующие с элементами3 и включенные в цепь управленияэлектродвигателями 10 механизма надвигания бревен (каретки 5),765 8 Ножевые корпуса 30, 31 и 32 разь- емны и могут быть установлены в иных вариантах: только 30 или 30 и 32.Нажимная плита механизма надвигания, выполненная совместно с кареткой,5, представляет собой...
Предыдущий патент: Устройство для автоматического контроля объектов
Следующий патент: Вычислительное устройство
Случайный патент: Источник ионов