Способ частотного управления электродвигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 245889
Авторы: Бродовский, Жилин, Иванов, Морозов, Тьков




Текст
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союа Советски Социалистически РеспудлиЗависимое от авт. свидетельстваЗаявлено 22.И 3,1967 ( 1174820/24-7с присоединением заявкихл. 2 1 ПК Н 02 р риоритет Комитет по делам изобретений и аткрытиУДК 621.316.718.5.076,7 (088,8) 1969, Бюллетень2 Опубликовано 11,при Совете МинистрСССР ата опубликования описания 28.Х.196 Авторызобретения родовский, Е, С. Иванов, А. С. Жилин, Д. М. Морозо и М. И, Пятков явител СПОСОБ ЧАСТОТНОГО УПРАВА ЕН ИЯ ЭЛЕКТРО АТЕЛЕМ 2 двигателя относитНапряжения К.ювмагничивание датпендикулярным ос1 в в 1 вобразуюткении, Выходные ельно исхоо И вх впчика по дям, а напдвухфазнунапряжен диого положения.производят навум взаимно пер. ряжения 11 вкм и ю систему напряия датчика пита. Известен способ частотного управления электродвигателем от регулируемого контура, который задает ток в обмотку статора в виде квадратурной суммы двух величин, одна из которых равна намагничивающему току дви гателя, а вторая изменяется пропорционально требуемому моменту, причем частоту тока задают тем большей, чем выше скорость двигателя.Цель изобретения - увеличение диапазона 10 регулирования. Это достигается тем, что контур задает ток и в роторную обмотку двига. теля, причем частота тока в статорной и роорной обмотках в два раза меньше частоты гращения двигателя. 15Г)а фиг. 1 приведена блок-схема устройства, служащего для осуществления предлагаемого способа, исходное положение вала двигателя; на фиг. 2 - то же, произвольное положепие вала двигателя, 20Статорные 1 и роторные 2 обмотки двигателя 3 питаются от двух силовых преобразователей 4 и Б, охваченных глубокой отрицательной обратной связью по току нагрузки и управляемых ог фазированных выпрямителей 25 б и 7. 1-1 а валу двигателя закреплен индуктивный датчик 8 углового положения ротора (типа вращающегося трансформатора), вал которого сочленен с валом двигателя через понижающий редуктор 9, поэтому скорость 30 вращения датчика в два раза меньше скорости вращения двигателя. Статорные обмотки 10 датчика питаются от двух высокочастотных источников переменного напряжения. Один источник выполнен нерегулируемым и питает статорную обмотку датчика напряжением с амплитудой с., величина которого выбирается исходя из оптимального соотношения между током намагничивания и активной составляющей тока ротора. Второй источник питания регулируется по амплпдуте Св для получения требуемого момента на валу.При установке датчика на валу двигателя добиваются совмещения осей пх магнитных потоков. При этом вал двигателя находится в исходном положении.При произвольном положении вала двигателя на роторных обмотках 11 датчика наводятСя НанряжЕНИя 111-в ат И Ь 2 вГв мт ПрИЧСМ аМ плитуды напряжений с 1 и У, определяются амплитудами с 1, и Сви углом поворота роатора датчика - , где а - угол поворота вала240 45 50 55 60 65 ют фазочувствительные выпрямители б и 7, опорные напряжения которых Ром ь имеют ту же частоту, что и напряжения, питающие датчик. Величины напряжений на выходе ыпрямителей строго пропорциональны величинам У и У, и меняются в зависимости от угла а- Если принять коэффициенты передачи 2выпрямителей равными единице, то силовые преобразователи 4 и 5 будут питать двигатель токами 1, и 1, величины которых строго пропорциональны величинам Ь и У. Направление электрического вращения вектора ампервитков ротора двигателя противоположно направлению электрического вращения вектора ампервитков статора. Обеспечивается это различным подключением начала и конца роторных и статорных обмоток по отношению к усилителям тока. Составляющая тока статора и ротора двигателя, задаваемая напряжением 1/Р., определяет рабочий поток машины, а составляющая тока статора и ротора, задаваемая Ь - момент машины.Если вал двигателя находится в исходном положении, то напряжение Уы, создает ампервитки в вертикально расположенных и согласно включенных обмотках статора и ротора и, следовательно, производит намагничивание двигателя, т. е, создается поток по вертикальной оси. Величина тока 1 строго пропорциональна напряжению У которое в этом случае определяется только напряжением У, т, е. 1: - У,: - У . Так как ампервитки статорной и роторной обмоток равны при обтекании их одним током, то намагничивание машины происходит ампервитками, пропорциональными величине 2 У Напряжение 1,создает ампервитки в горизонтально расположенных и встречно включенных обмотках статора и ротора двигателя и, следовательно, намагничивания двигателя не происходит, причем 1, =С/,=У,. Ток 1 в горизонтально расположенной обмотке ротора взаимодействует с потоком, наводимым в вертикально расположенных обмотках статора и ротора, и создает момент М = - 2 1,1 =2 УУ который направлен против направления вращения часовой стрелки. При изменении фазы сигнала У,изменяется знак тока 1, и момен га М.Таким образом, при заданном У=сопз 1 вращающий момент двигателя пропорционален по величине сигналу У . При выбранной схеме включения и питания обмоток двигателя обеспечивается режим работы, аналогичный режиму работы машины постоянного тока с компенсационной обмоткой,Полученные зависимости справедливы для любого угла поворота ротора и датчика относительно исходного положения, Независимо от угла поворота ротора, т. е. при вращении двигателя, в нем существует поток, величина которого пропорциональна У ", и вращение 5 ю 15 го г 5 30 35 его происходит в ту же сторону, что и вращение ротора машины, но со скоростью, в два раза меньшей, Также независимо от угла поворота ротора ампервитки ротора и статора пропорциональны сигналу У,и компенсируют друг друга. Их вращение происходит в сторону вращения ротора, но со скоростью, в два раза меньшей скорости вращения ротора. Ззи ампервитки сдвинуты относительно ампервитков намагничивания на 90.Таким образом, в выражение для момента пе входит синус угла между потоком двигателя и током ввиду того, что поток двигателя и ток ротора всегда имеют фазовый сдвиг, равный 90, т. е, при фиксации датчика на валу двигателя в нужном положении двигатель всегда работает с максимально возможным моментом при заданной величине токов.При торможении вала двигателя развивается момент Ч =20 У при включении вала и при 1/,=сопз 1 привод разгоняется с по. стояпным ускорением, определяемым значением У,. Разгон продолжается до тех пор, пока преобразователи 4 и 5 обеспечивают токи, задаваемые У, и У,. На этом участке механическая характеристика привода близка к идеально мягкой. Нелинейная область характеристики определяется моментом достижения равенства противо-э.д.с. двигателя и выходного напряжения питающих преобразователей.Датчик 8 может быть также выполнен с числом полюсов, в два раза меньшим числа полюсов двигателя, что позволяет исключить механический редуктор, использованный для этой цели в описанном устройстве. В случае использования многофазного датчика или двигателя необходимо производить преобразование числа фаз на входе датчика, так как он должен питаться двухфазной системой напряжений, и на выходе датчика - в случае несовпадения числа фаз датчика и двигателя.Для обеспечения режима работы привода с постоянной мощностью на валу при работе в замкнутой системе регулирования с расширенным диапазоном, возможно осуществлять регулирование обоих сигналов, питающих статорные обмотки датчика, что позволяет регулировать поток двигателя,Применение предложенного способа управления позволяет для получения заданного диапазона регулирования в замкнутой скоростной системе использовать преобразователи, рассчитанные на частоты, в два раза меньшие, чем необходимо для получения тех же скоростей при регулировании только со стороны статора. Это особенно существенно для силовых преобразователей, выполненных на элементах с ограниченными частотными свойствами,Использование предлагаемого способа дает возможность получать неограниченную пере 245889грузочную способность двигателя по моменту,Практически перегрузочная способность ограничивается лишь возможностями силовых преобразователей и нагревом двигателей,Таким образом, предлагаемый способ целесообразно использовать для приводов, требующих поддержания момента при нулевой скорости. Повышенная устойчивость к ударным нагрузкам и скачкообразным изменениям входного сигнала позволяет использовать его в замкнутых системах автоматического регулирования скорости приводов, работающих в условиях ударных нагрузок и требующих точной стабилизации скорости. Пред.лет изобретения Способ частогного управления электродвигателем от регулируемого конгура, который 5 задает ток в обмотку статора в виде квадратурной суммы двух величин, одна пз которых равна намагничпва 1 ощему ток двигателя, а вторая пзменяггся пропорционально требуе.мому моменту, причем частоту тока задают 10 тем большей, чем выше скорость двигателя,отличающийся тем, что, с целью увеличения диапазона регулирования, контур задает ток также и в обмотку ротора двигателя, причем частота тока в статорной и роторной обмот ках в два раза меньше ч .тоты вращения двиГателя.Тираж 480елам пзобрсгений и открытий при СоветМосква, Центр, пр, Серова, д. 4 Подписноеминистров СССР Заказ 2763/4ЦНИИПИ Комитета по Составитель Б, й 1 ин Техред Т. П. Курил ипографпя, пр. Сапунова, 2 колаева оробова
СмотретьЗаявка
1174820
В. Н. Бродовский, Е. С. Иванов, А. С. Жилин, Д. М. Морозов, М. И. тков
МПК / Метки
МПК: H02P 7/42
Метки: частотного, электродвигателем
Опубликовано: 01.01.1969
Код ссылки
<a href="https://patents.su/4-245889-sposob-chastotnogo-upravleniya-ehlektrodvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ частотного управления электродвигателем</a>
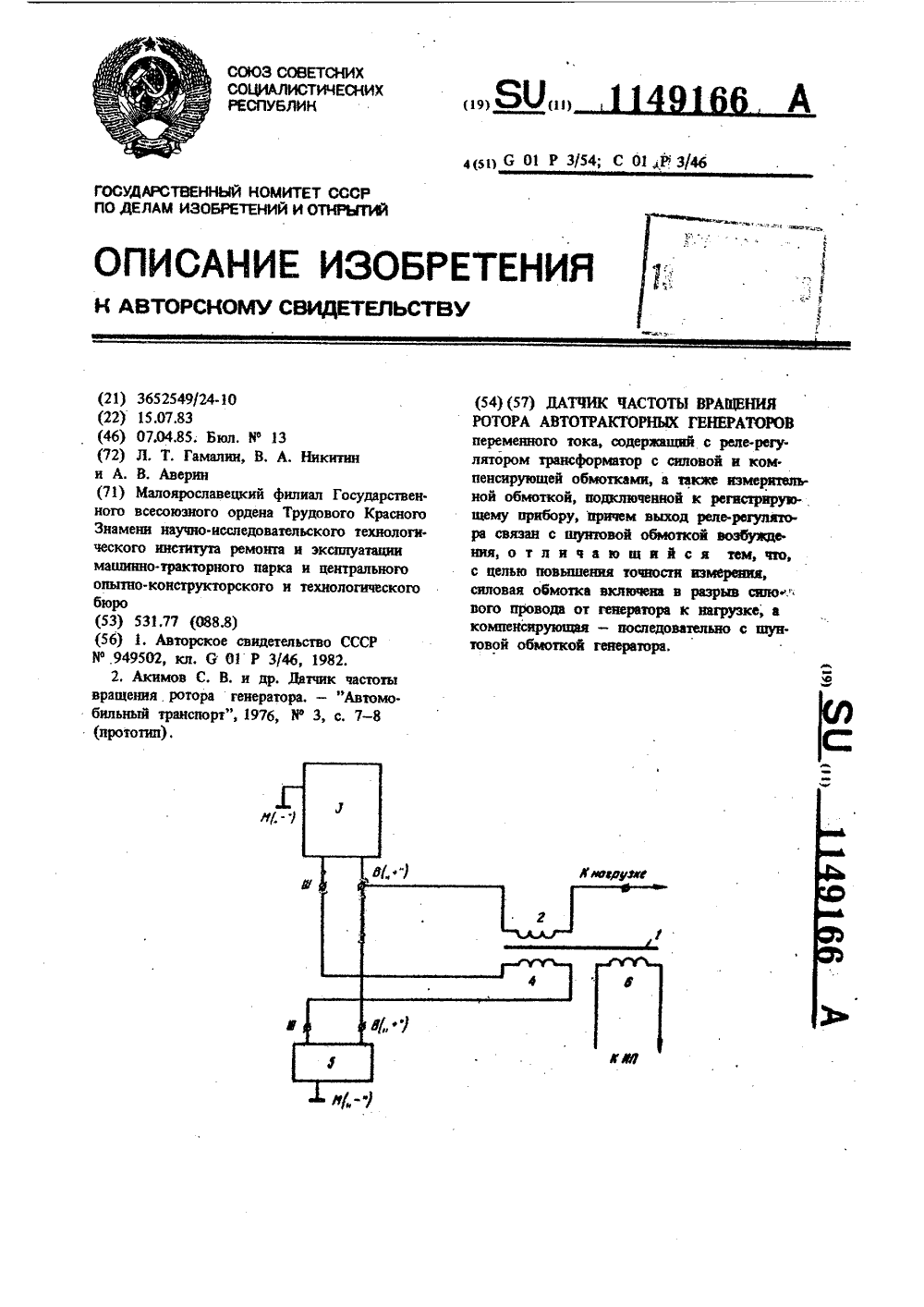
Датчик частоты вращения ротора автотракторных генераторов
Номер патента: 1149166
Опубликовано: 07.04.1985
Авторы: Аверин, Гамалин, Никитин
Метки: автотракторных, вращения, генераторов, датчик, ротора, частоты
...силовая обмотка включена в разрыв силового провода от генерато ра к нагрузке, а компенсирующая - последовательно с шунтовой обмоткой генератора.На чертеже изображена схема включениядатчика.Датчик имеет магнитопровод 1, силовуюобмотку 2, включенную в разрыв провода,идущего с выхода генератора 3 к нагрузке,шунтовую обмотку 4, включаемую в разрывпровода, идущего от клеммы "ш" реле-регулятора 5 к обмотке возбуждения генератора(клемма "ш), обмотку связи 6, подключаемую к регистрируемому измерительному прибору ИП.Для того, чтобы компенсировать погреш.ности, вызываемые током обмотки возбуждения, обмотка 2 и обмотка 4 выполненыбифилярно и включены встречно,При работе генератора 3 в рабочем режимепроисходит регулирование напряжения на...
Двухслойная обмотка статоров и роторов трехфазных машин переменного тока

Номер патента: 32036
Опубликовано: 30.09.1933
МПК: H02K 3/02, H02K 3/12, H02K 3/28
Метки: двухслойная, машин, обмотка, переменного, роторов, статоров, трехфазных
...машинах с двумя скоростями вращения. Обе части располагаются одна относительно другой таким образом что лежащие в одном и том же пазу стороны катушек основной и добавочной частей принадлежат обязательно к разным фазам, а лежащие в смежных пазах стороны катушек одной и той же фазы обтекаются током в одном и том же направлении. Добавочная часть обмотки укладывается в пазы либо так,что все стороны ее катушек лежат на дне пазов, как на фиг. 3, либо так, что часть укладывается на дно, а часть н: 2Для пояснения укладки на фиг. 7, 8 и 9 приведено расположение сторон катушек основной и добавочной частей, относящееся к первому способу выполнения,для двух, четырех и шести пазов на полюс и фазу.Преимуществом описываемой обмотки перед...
Способ получения зазора между ротором и статором датчика угла

Номер патента: 688813
Опубликовано: 30.09.1979
МПК: G01B 5/14
Метки: датчика, зазора, между, ротором, статором, угла
...нагрузку до выбора зазора между статором, прокладкой иротором, в зазор между статором и основакием вводят заполнитель, полимеризуют его,снимают нагрузку и удаляют прокладку. Способ осуществляется следующимазом. носи быть Для полуи статоромтолщине равго зазора. 3та б статорк ротору 1.статором 8,заполнительпроизводятснимают скокладку 7, ченый зазор м ретени ормула и Способ получения зазора между ротором и статором датчика угла, заключающийся в том, что ротор закрепляют неподвижно, статор располагают на основании датчика с возможностью перемещения, помещают между деталями датчика прокладку, чем обеспечивают зазор между статором .и ротором, отл ич ающи йся тем, что, с целью повышения точности, прокладку помещают между ротором и статором,...
Электрический двигатель с винтообразным статором

Номер патента: 896721
Опубликовано: 07.01.1982
Автор: Беликов
МПК: H02K 41/02
Метки: винтообразным, двигатель, статором, электрический
...паэ б, в котором уложена обмотка 3 возбуждения, Длина участка магнитопровода, на котором размещена обмотка 3 возбуждения, равна 12 К+1)Г, где К=0,1,2,3 С - полюсное деление двигателя, а длина участков для рабочей обмотки кратна 2 С 0 Рабочие обмотки выполняются в соот-ЗО эить вес рабочей обмотки по сравнению с использованием раздельных рабочих обмоток на 25-30.Ферромагнитный ротор 4 имеет винтообразные выступы 5 длиной, равнойи расположенные на расстоянии 7:Двигатель может иметь два винто- образных магнитопровода статора (фиг.4). Общая длина каждого магнитопр)вода статора в этом случае не превьпйает длины одного витка винтовой . - линии. На каждом из магнитопроводов статора имеется своя обмотка возбуждения находящаяся в...
Датчик скорости вращения

Номер патента: 584249
Опубликовано: 15.12.1977
Авторы: Жалдыбин, Зарипов, Николаев, Павлович
МПК: G01P 3/46
Метки: вращения, датчик, скорости
...чувствительности предлагаемого датчика в нем взаимообращенные поверхности постоянного магнита выполнены с выступами, а поверхности магнитопровода - с пазами, через которые при вращении проходят выступы постоянного магнита. 0 Принцип действия датч ния состоит в том, что пр 1 отношение площадей К изменение магнитных п нальное угловой скорости 5 ря этому в обмотках 3 и ваться ЭДС, также прона сти вращения. При этом постоянного магнита и м филированными возрастае О датчика.вращеагнита ызывая порцио- лагодаНа чертеже содержащий п единяемый с движения, изм цевые магнито нитопроводов,ванные частисываемый д агнит 1, вал контролир бмотки 3, 4 кольца 7 - 1 3, 14, проф ного магнит показан опи остоянный м источником ерительные о проводы 5,...
Предыдущий патент: Непосредственный преобразователь частоты
Следующий патент: Электростатический ваттметр
Случайный патент: Выдвижной под нагревательной печи