Способ определения временных положений сигналов и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
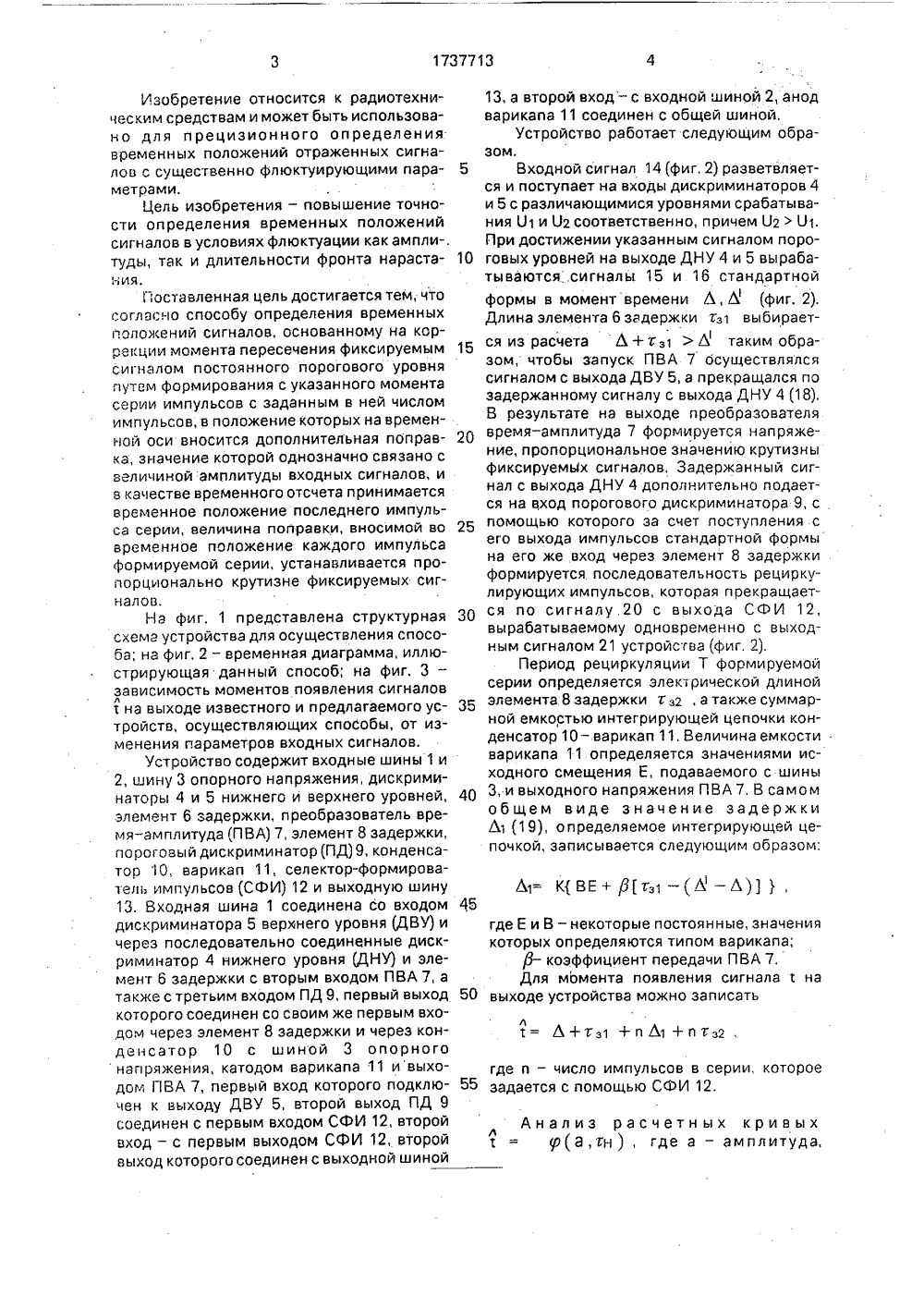
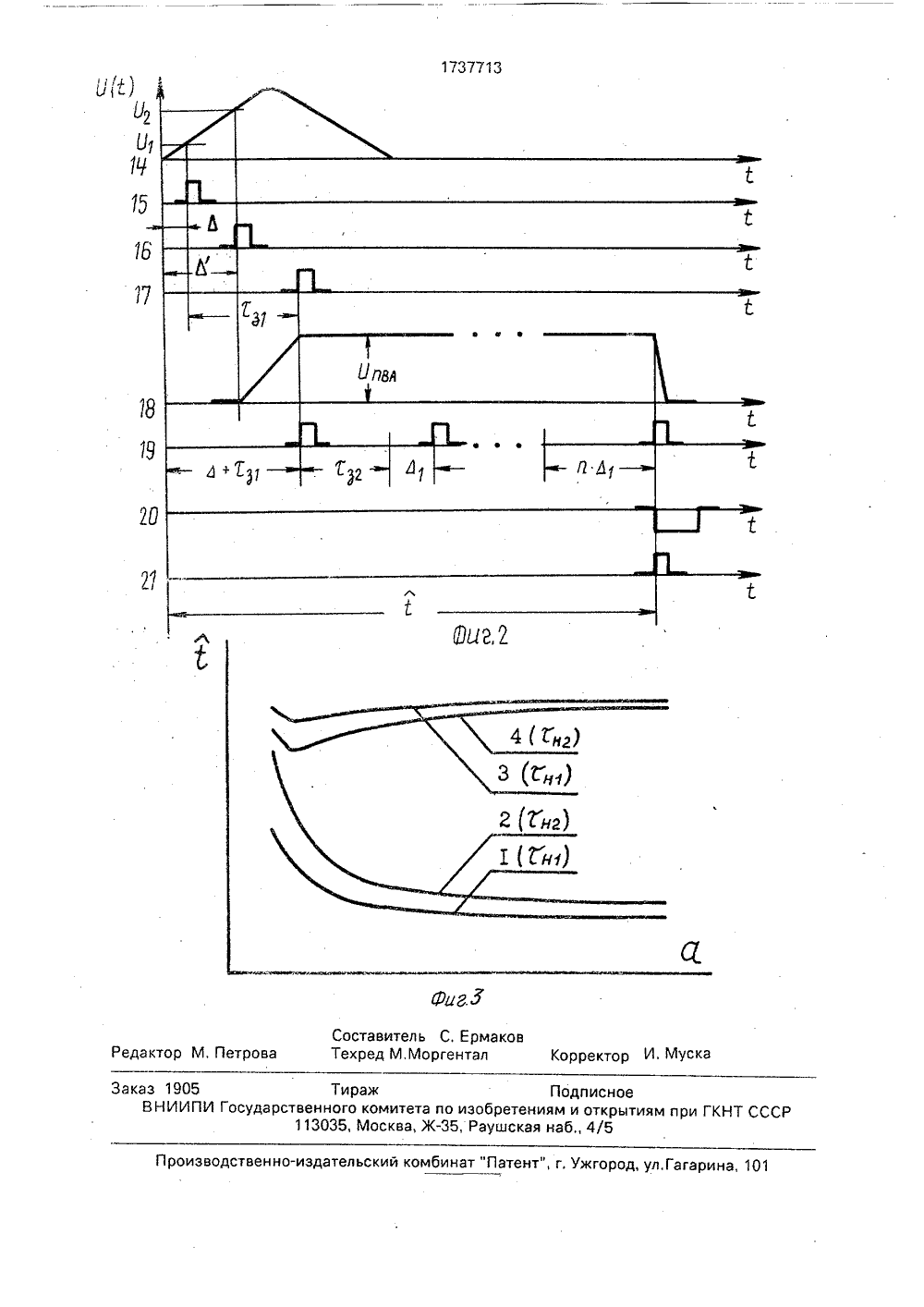
) 01 ПИСАНИЕ ИЗОБРЕТЕН ЛЬСТВУ КОМУ С В%20государнинаин, Нович твенный уни А. Гулякина Основы наносекун. Атомиздат, 1976,ни тво СССР53, 1987. идетель 03 К 5/(54) СПОСОБ ОПРЕД НЫХ ПОЛОЖЕНИЙ СИ СТВО ДЛЯ ЕГО ОСУЩ (57) Изобретение може в системах обработки и Способ заключается в пересечения сигналом ЛЕНИЯ ВРЕМЕННАЛОВ И УСТРОЙСТВЛЕНИЯ быть использовано пульсных сигналов. коррекции момента остоянного порогоЧ 2 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(56) Агахянаня Т. Мдной импульснойс. 333,Авторское свМ 1527709, кл. Н вого уровня, формировании с этого момента серии импульсов, в положение кОторых на временной оси вносится поправка, значение которой связано с амплитудой сигнала. Формирование величины поправки пропорционально крутизне фиксируемого сигнала позволяет повысить точность способа в условиях флюктуации амплитуды и длительности фронта входного сигнала. Устройство определения временных положений сигналов содержит две входные шины 1 и 2, пороговый дискриминатор 9, шину 3 опорного напряжения, элемент 6 задержки, конденсатор 10, варикап 11, селектор-формирователь 12 импульсов и выходную шину 13. Введение дискриминаторов.4 и 5 нижнего и верхнего уровней, элемента 8 задержки и преобразователя время-амплитуда позволяет повысить точность устройств в условиях флюктуации амплитуды и фронта входного сигнала. 2 с,п. ф-лы, 3 ил.5 10 15 20 30 40 50 55 Изобретение относится к радиотехническим средствам и может быть использовано для прецизионного определения временных положений отраженных сигналов с существенно флюктуирующими параметрами.Цель изобретения - повышение точности определения временных положений сигналов в условиях флюктуации как амплитуды, так и длительности фронта нарастания,Поставленная цель достигается тем, что согласно способу определения временных положений сигналов, основанному на коррекции момента пересечения фиксируемым сигналом постоянного порогового уровня путем формирования с указанного момента серии импульсов с заданным в ней числом импульсов, в положение которых на временной оси вносится дополнительная поправка, значение которой однозначно связано с величиной амплитуды входных сигналов, и в качестве временного отсчета принимается временное положение последнего импульса серии, величина поправки, вносимой во временное положение каждого импульса формируемой серии, устанавливается пропорционально крутизне фиксируемых сигналов.На фиг. 1 представлена структурная схема устройства для осуществления способа; на фиг. 2 - временная диаграмма, иллюстрирующая данный способ; на фиг. 3 -зависимость моментов появления сигналовлт на выходе известного и предлагаемого устройств, осуществляющих способы, от изменения параметров входных сигналов. Устройство содержит входные шины 1 и 2, шину 3 опорного напряжения, дискриминаторы 4 и 5 нижнего и верхнего уровней, элемент 6 задержки, преобразователь время-амплитуда (ПВА) 7, элемент 8 задержки, поро овый дискриминатор (ПД) 9, конденсатор О, варикап 11, селектор-формирователь импульсов (СФИ) 12 и выходную шину 13. Входная шина 1 соединена со входом дискриминатора 5 верхнего уровня (ДВУ) и через последовательно соединенные дискриминатор 4 нижнего уровня (ДНУ) и элемент 6 задержки с вторым входом ПВА 7, а также с третьим входом ПД 9, первый выход которого соединен со своим же первым входом через элемент 8 задержки и через конденсатор 10 с шиной 3 опорногонапряжения, катодом варикапа 11 и выходом ПВА 7, первый вход которого подключен к выходу ДВУ 5, второй выход ПД 9 соединен с первым входом СФИ 12, второй вход - с первым выходом СФИ 12, второй выход которого соединен с выходной шиной 13, а второй вход - с входной шиной 2, анод варикапа 11 соединен с общей шийой,Устройство работает следующим образом.Входной сигнал 14 (фиг, 2) разветвляется и поступает на входы дискриминаторов 4 и 5 с различающимися уровнями срабатывания 01 и 02 соответственно, причем 0201. При достижении указанным сигналом пороговых уровней на выходе ДНУ 4 и 5 вырабатываются сигналы 15 и 16 стандартной формы в моментвремени Л, Л (фиг. 2). Длина элемента 6 задержки гз 1 выбирается из расчета Л+ тз 1Ь таким обра 1зом, чтобы запуск ПВА 7 осуществлялся сигналом с выхода ДВУ 5, а прекращался по задержанному сигналу с выхода ДНУ 4 (18), В результате на выходе преобразователя время - амплитуда 7 формируется напряжение, пропорциональное значению крутизны фиксируемых сигналов. Задержанный сигнал с выхода ДНУ 4 дополнительно подается на вход порогового дискриминатора 9, с помощью которого за счет поступления с его выхода импульсов стандартной формы на его же вход через элемент 8 задержки формируется. последовательность рециркулирующих импульсов, которая прекращается по сигналу 20 с выхода СФИ 12, вырабатываемому одновременно с выходным сигналом 21 устройства (фиг. 2),Период рециркуляции Т формируемой серии определяется электрической длиной элемента 8 задержки гз 2, а также суммарной емкостью интегрирующей цепочки конденсатор 10 - варикап 11, Величина емкости варикапа 11 определяется значениями исходного смещения Е, подаваемого с шины 3, и выходного напряжения ПВА 7, В самом общем виде значение задержки Ь (19), определяемое интегрирующей цепочкой, записывается следующим образом: Ь= К( ВЕ + Р Г тз 1 - ( Л - Л) ) ) где Е и В - некоторые постоянные, значениякоторых определяются типом варикапа;р- коэффициент передачи ПВА 7.Для мЬмента появления сигнала т навыходе устройства можно записать л т = Ь + Г з 1 + и Л 1 + и Г з 2 где и - число импульсов в серии, котороезадается с помощью СФИ 12. Анализ расчетных кривыхлс = р(а, гн ), где а - амплитуда,1737713 40 45 50 55 гн - длительность фронта нарастания фиксируемых сигналов, представленных на фиг.3, для известного устройства (кривые 1 и 2) и для предлагаемого устройства, реализующего способ (кривые 3 и 4), позволяет сделать вывод, что при возрастании дли тельности фронта нарастания ( тн 2 ) тн) имеет место существенное увеличение аблсолютного значения зависимости 1 для известного устройства (кривая 2) в отличие от аналогичной кривой (4) для предлагаемого. 10 Величина абсолютного значения зависимолсти 1 однозначно связана с точностью определения временных положений сигналов данным устройством, т. е, чем меньше указанное значение, тем выше точность опре деления.Предлагаемый способ позволяет повысить точность определения временных положений сигналов не менее чем в три раза по сравнению с известным за счет принци пиально нового метода формирования требуемых корректур Л 1, эффективно подавляющих погрешность измерения, вызванную не только амплитудным разбросом регистрируемых сигналов, но и флюктуаци ями последних по длительности фронта нарастания. Формула изобретения1. Способ определения временных по ложений сигналов, основанный на коррекции момента пересечения фиксируемым сигналом постоянного порогового уровня путем формирования.с указанного момента серии импульсов с заданным в ней числом 35 импульсов, в положение которых на временной оси вносится дополнительная поправка, значение которой однозначно связано с величиной амплитуды входных сигналов, и в качестве временного отсчета принимается временное положение последнего импульса серии, о т л и ч а ю щ и й с я тем, что, с целью повышения точности определения в условиях флюктуации как амплитуды, так и длительности фронта нарастания регистрируемых сигналов, величина поправки, вносимой во временное положение каждого импульса формируемой серии, устанавливается пропорционально крутизне фиксируемых сигналов.2. Устройство для определения временных положений сигналов, содержащее первую входную шину, пороговый дискриминатор, первый выход которого соединен со своим же первым входом, а также через конденсатор с шиной опорного напряжения и катодом варикапа, второй выход - с первым входом селектора-формирователя импульсов, а второй вход - с первым выходом селектора-формирователя импульсов, второй выход которого соединен с выходной шиной, а второй вход - с второй входной шиной, анод варикапа соединен с общей шиной, о тл и ч а ю щ е е с я тем, что в него введены дискриминатор нижнего уровня, дискриминатор верхнего уровня, второй элемент задержки и преобразователь время-амплитуда, причем первая входная шина соединена с входом дискриминатора верхнего уровня и через последовательно соединенные дискриминатор нижнего уровня и второй элемент задержки - с третьим входом порогового дискриминатора и первым входом преобразователя время-амплитуда, второй вход которого соединен с выходом дискриминатора верхнего уровня, а выход - с шиной опорного напряжения.1737713 Корректор И, МУска кто тро аказ 1905 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5
СмотретьЗаявка
4767559, 07.12.1989
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМ. В. И. ЛЕНИНА
ГУЛЯКИН ВАЛЕРИЙ АЛЕКСЕЕВИЧ, ГУЛЯКИНА НАТАЛЬЯ АНАТОЛЬЕВНА, ЗЕНЬКОВИЧ АЛЕКСАНДР ГЕОРГИЕВИЧ
МПК / Метки
МПК: H03K 5/153
Метки: временных, положений, сигналов
Опубликовано: 30.05.1992
Код ссылки
<a href="https://patents.su/4-1737713-sposob-opredeleniya-vremennykh-polozhenijj-signalov-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения временных положений сигналов и устройство для его осуществления</a>
Способ определения относительного уровня измерения временных параметров видеоимпульсов

Номер патента: 1483397
Опубликовано: 30.05.1989
МПК: G01R 29/02
Метки: видеоимпульсов, временных, относительного, параметров, уровня
...выход которого соединен с первым входом компаратора 14, второй вход которого соединен с входом 20, а выход с входом элемента 15, выход которого соединен с вторым входом элемента И 18, выход элемента 3 соединен с вторь 1 м входом сумматора 13 и первым входом умножителя 7, выход которого соединен с третьим входом сумматора 13, а второй вход - с выходом квадратора 4, второй вход делителя 9 соединен с взодом 20, а выход с входом АЦП 9, выход которого соединен с вторым входом сборки 10, выход которой соединен с входом индикатора 1.Устройство работает следующим образом.В исходном состоянии программируемый генератор 1 видеоимпульсов остановлен, триггер 17 - в нулевом состоянии. Ыу 5 10 15 20 25 30 35 40 45 50 55 левой уровень с прямого выхода...
Устройство фиксации временных положений случайных сигналов

Номер патента: 1095379
Опубликовано: 30.05.1984
МПК: H03K 5/153
Метки: временных, положений, сигналов, случайных, фиксации
...тока рассасывания заряда, а первый пороговый Формирователь выходом соединен с вторыми входами генераторов токов накопления и рассасывания заряда через третью линию задержки.На фиг. 1 представлена структурная схема предлагаемого устройства Фиксации временных положений случайных сигналов; на фиг. 2 - временнаядиаграмма его работы; на фиг. 3- зависимости момента фиксации вход.ного сигнала от длительности фронта нарастания последнего для известногс (а) и предлагаемого (б-г) устройства.Предлагаемое устройство Фиксации временного положения случайных сигналов содержит входную клемму 1, соединенную со входом первой линии задержки 2 с электрической длиной Т, выход которой, подключен к входу второй линии задержки 3 с электри 1 Уческой длиной...
Устройство определения временного положения и уровня максимумов сигнала

Номер патента: 1437979
Опубликовано: 15.11.1988
Авторы: Белов, Гацев, Глазунов, Чумаков
МПК: H03K 5/153
Метки: временного, максимумов, положения, сигнала, уровня
...разрешая прохождение импульсов, поступающих на его второй вход.Импульсы со второго и третьего выходов блока 3 сравнения, формируемые им после достижения сигналом максимума при выполнении условия (2) или (3) соответственно, через элемент ИЛИ 8 и элемент 10 совпадения поступают на счетный вход счетчика 12 (фиг.2 з). После поступления на счетный вход счетчика 12 некоторого числа импульсов происходит останов счетчика 12 и Я-й импульс, поступающий на счетный вход, транслируется на первый выход счетчика 12 (фиг.2 и). Импульс с первого выхода счетчика 12, являющийся признаком наличия максимума сигнала ПИпосле прохожденйя им элемента 1 Л:1 14 поступает на выход 20 устройства (фиг. 2 м). Одновременно на втором выходе счетчика 12...
Устройство фиксации временных положений сигналов с флуктуирующими параметрами

Номер патента: 1508341
Опубликовано: 15.09.1989
Авторы: Багдасарьян, Вартанян
МПК: H03K 5/153
Метки: временных, параметрами, положений, сигналов, фиксации, флуктуирующими
...компараторов 2, которые сравнивают его с эталонными напряжениями, поступающими с соответствующих выходов резистивного делителя. При увеличении амплитуды сигнала, т.е. .45 при последовательном срабатывании компараторов 2 в сторону старшего разряда, логическая единица, которая появляется на прямом выходе сработавшего компаратора 2, задерживаетсял 50 элементом 3 на время с , которое пропорционально шагу квантования для прохождения фронта импульса до следующего по величине уровня квантования и включению соответствующего ком 55 паратора, старшего по разряду, В том случае, если сработал следующий по разряду компаратор 2 в течение времени, то логический нуль с его инверсного выхода запирает прохождение логической единицы с прямого выхода...
Способ измерения временных положений сигналов и устройство для его осуществления

Номер патента: 1527709
Опубликовано: 07.12.1989
МПК: H03K 5/153
Метки: временных, положений, сигналов
...4 соединен с первым входоманалогового запоминающего устройства6 и с входной клеммой 1, а первыйвход через линию 5 задержки подключенк первому выходу указанного дискриминатора 4, кроме того, первый выходпоследнего через конденсатор 7 соединен с выходом АЗУ 6, катодом варикапа 8 и входной клеммой 3, второйвыход порогового дискриминатора 4подключен к первому входу ПСФИ 9,второй вход которого соединен с входной клеммой 2, первый выход ПСФИ 9подключен к выходной клемме 10, авторой выход - к третьему входу порогового дискриминатора 4 и к второмувходу АЗУ 6, анод варикапа 8 соединенс общей шиной,Устройство функционирует следующимобразом.Входной сигнал разветвЛяется ипоступает на входы АЗУ 6 и пороговогодискриминатора 4, При достижениивходным...
Предыдущий патент: Многоканальный таймер
Следующий патент: Управляемый делитель частоты
Случайный патент: Изображающая камера для контроля изделий