Способ измерения поля градиента показателя преломления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1636736
Автор: Гуменник

Текст
(51)5 С 01 И 21/41 ТЕН хани ой е динамического диасти и расши зона.На Аиема у 1 и 2 едставлена блокеализующих спосо роис ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ПЮТ СССР ОПИСАНИЕ ИЗ К АВТОРСКОМУ СВИДЕТЕ(71) Институт проблем ме ки АН СССР(54) СПОСОБ ИЗМЕРЕНИЯ ПОЛЯ ГРАДИНПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ(57) Изобретение относится к оптичеким методам исследования. физическихсвойств объектов, влияющих на параметры зондирующей световой волны, и Изобретение относится к оптическим методам исследования объектов, содержащих прозрачные неоднородности показателя преломления (фазовых объектов), и может быть использовано для технологического контроля процес" сов в различных отраслях народного хозяйства, например в химической, электронной, оптикомеханической, пище вой промышленности, а также в гид" роаэродинамике, Физике плазмы, теплофизике.Цель изобретения - повышение точможет быть использовано вхимической электронной, оптико-механической,пищевой промышленности и т.д. Цельизобретения - повышение точности ирасширение динамического диапазона.Способ заключается в просвечивании исследуемого объекта световой волной и регистрации Аазовых искажений этойволны после прохождения через объект, Положительный эффект достигается просвечиванпем объекта узким (по сравнению с его пространственным масштабом) пучком света и регистрацией инАормации о положении прошедшего через объект светового пучка. Измерения проводятся в два этапа: сначала прп а отсутствии в рабочем участке объекта ф7 а затем - при его наличии, с разност- фф н обработкой получаемой информации. ф ф Устройство (фиг.1) содержит лазер 1, оптическую систему 2, зеркальный восьмигранный барабан 3, связанный механической связью с шаговым двигателем 4, исследуемый объект 5, оптическуло систему 6, сопряженную с Аотодиодной матрицей 7, которая связана с ЗВМ 8, блок 9 КАМАКа, связанный с ЭВМ 8с шаговым двигателем 4.Устройство (Фиг,2) содержит тепловой источник 10 света, коллнмирующую систему 11, диафрагму 12, магнитоэлектрический сканер 13, оптическую систему. образованную двумя объективами 14 и 15. между которыми находится исследуемый объект 16, квадратный координатно-чувствительный фото 163673645 приемник (КЧФ) 17, связанный с многоканальным самописцем 18, и генератор.19, связанный с самописцем 18 и со сканером 13.5Устройство (фиг.1) работает следующим образом.Свет, генерируемый лазером преобразуется оптической системой 2 с целью получения требующегося прост ранственного разрешения и попадает на зеркальный восьмигранный барабан 3 который приводится во вращение с помощью шагового двигателя 4. Управление шаговым двигателем осуществля ется ЭВМ 8 через блок 9 КАМАКа. Лазерный пучок,.пространственное положение которого в данный момент времени определяется уровнем управляющих напряжений на двигателе 4, вырабаты ваемых блоком 9 КАЧАК по команде с ЭВМ 8, проходит через исследуемый объект 5. На выходе из объекта 5 лазерный пучок отклоняется на угол, величина которого определяется интеграль , ным по длине пучка значением градиен-та показателя преломления. Отклоненный лазерный пучок проходит через оптическую систему б, которая в заданном масштабе строит изображение объ О екта 5 на светочувствительной поверхности фотодиодной матрицы 7. На выходе этой матрицы формируется элект. рический сигнал, содержащий информацию о положении на ее поверхности лазерного пучка в соответствующий момент времени, Синхронизация сканирования и приема осуществляется за счет того, что сканированием и приемом информации управляет ЭВМ. В памяти ма О шины хранится информация о совокупности координат лазерного пучка на поверхности фотодиодной матрицы 7 при сканировании рабочего участка в случае отсутствия в нем исследуемого,объекта. При этом запоминаются искажающие полезную информацию паразитные отклонения, вызванные, например, аберрациями оптической системы 6 и низким качеством стекла, из которого выполнены защитные окна рабочей части. На втором этапе измерений, когда зондирование рабочего участка осуществляется при наличии в нем исследуемого объекта 5, также происходит прием в ЭИ 8 совокупности координат на поверхности фотодиодной матрицы 7 лазерных пучков, отклоненных обьектом 5, и разностпая обработка этих координат с учетом полученной на первом этапе измерений соответствующей совокупности координат. По полученной разностной совокупности координат с помощью ЭИ вычисляется распределение градиента показателя преломления в объекте.Устройство (фиг.2) "работает следующим образом,С помощью коллимирующей системы 11 и диафрагмы 12 формируется узкий пучок света, источником которого явля ется тепловой источник 10, Узкий пучок света попадает на магнитоэлектрический сканер 13, представляющий собой зеркало, управляемое по углу наклона с помощью электрического сиг" нала, вырабатываемого генератором 19. Отклоненный сканером узкий пучок света преобразуется объективом 14, про-,. свечивает исследуемый объект 16, испытывая отклонение на неоднородностях показателя преломления, преобразуется объективом 15 и попадает на поверхность квадрантного координатно-чувствительного фотоприемника 17. При этом зеркало сканера 13 и фоточувствительная поверхность фотоприемника 17 являются сопряженными с помощью оптической системы, образованной объективами 14 и 15. Электрический сигнал с КЧФ 17 пропорционален положению светового пучка на его поверхности и регистрируется с помощью самописца 18. На другой канал самописца 18 подается сигнал с генератора 19, управляющего сканером 13 и дающего информацию о координате сканируемого луча, На первом этапе записывается сигнал КЧФ 17 полученный при отсутствии в рабочем участке объекта. а на втором этапе - при наличии объекта 16. Разностная обработка сигнала осуществляется путем вычитания соответствующих показаний, полученных во втором и в первом случае.Сущность изобретения состоит в том, что зондирование исследуемого объекта осуществляется узким по сравнению с его пространственным масштабом пучком света, который сканируется, освещая все излучаемое пространство объекта. Синхронно со сканированием осуществляется регистрация угла рефракции зондирующего пучка, а также разностная обработка информации, получаемой при освещении рабочего участка при наличии и при6736 615 ТАИР Таким образом, при освещении оптически однородного участкапучок света остается неподвижным на5поверхности фотоприемника 17 при сканировании зондирующего пучка света.При отклонении зондирующего пучка вобъекте на угол1ЯпЬау,а и, ЗЕгде и - показатель преломления среоды, окружакицей изучаемыйобъект;и . - показатель преломления5объекта;Ь - протяженность объекта вдольнаправления зондирования у;Е - направление сканирования,происходит смещение светового пучкана поверхности фотоприемника вдольоси Е на величину 1 и о5163отсутствии в нем исследуемого объекта. Повышение точности, и расширениединамического диапазона измеренияраспределения градиента показателяпреломления обеспечивается тем, чтоинформация не искажается, так какнет наложения лучей света, прошедших.через отдельные участки объекта.Кроме того, так как фиксируетсяинформация только о положении (координате) прошедшего через объект светового пучка повышение точностиобеспечивается также за счет исключения влияния на полезную информациюпаразитных Флуктуаций интенсивностипрошедшего через объект пучка света(вследствие Флуктуаций интенсивностизондирующего пучка или по другимпричинам),Кроме того, применение разностного способа обработки информации позволяет также повысить точность и расширить динамический диапазон измерений за счет исключения из результатовизмерений стационарных паразитных эфФектов,вызывающих изменение освещенности в теневой картине известного способа, например таких как низкое качество оптическихэлементов измерительной системы. Приэтом повышение точности и расширение,динамического диапазона достигаются всочетании со сканированием и Фиксацией отклонения луча от невозмущенного направления вследствие проявления этими признаками указанныхсвойств.П р.и и е р. Способ был реализованс помощью устройства (Фиг.2). Светот ртутной лампы типа ДРШколлимируется с помощью линзы. Круглаядиафрагма 12 диаметром 0,5 мм вырезает узкий пучок света, попадающий насканер 13, который представляет собойзеркало, закрепленное на токопроводящей рамке, помещенной в поле постоянного магнита. Сканер 13 осуществляетстрочную развертку зондирующего лучаи выполнен на базе магнитоэлектрического гальванометра и постоянногомагнита. Зеркало сканера находитсяв передней фокальной плоскости осветительного объектива 14 ТАИР. Таким образом, объект 16 просвечиваетсяпараллельно перемещающимся при ска- .нировании пучком света. Квадрантныйфотоприемник 17 находится в задней фокальной плоскости приемного объектива ю 6 25 где Г - фокусное расстояние объектива ТАИР(Г = 300 мм). Так, если Эп/ЭЕ = 101/см,а Е = 20 см и объект находится в 30 воздухе, тоЭп -ФдЕ-- 2 10 рад. 0 С Ь =и может быть надежно зарегистрировано квадрантным Фотодиодом. Так, еслиФотодиод имеет крутизну координатной 40 характеристики 10 В/мм, то на выходе КЧФ имеем сигнал с амплитудой,равной 0,6 В. Этот сигнал регистрируется самописцем. Сигнал КЧФ не зависит при этом от интенсивности свето вого пучка на поверхности КЧФ в широком диапазоне изменения интенсивностей, а градуировка сводится к получению координатной характеристики КЧФ,которая может бить снята один раз и 50 является паспортной характеристикой устройстваУправление сканером осуществляется симметричным треугольныч импульсом, вырабатываемым генератором Г 6-27.55 Синхронизация сканирования и приемаинформации осуществляется путемзаписи на второй канал самописца управляющего сканером напряжения отгенератора Гб. Вычитание регистро.1636736 грамм сигналов сканирования осуществляется путем наложения и соответствующего,поэлементного вычитания регистрограмм, полученных на самописце приналичии и при отсутствии объекта .врабочем участке устройства. Формула изобретения ФИГ. Составитель В.Варнавскийедактор Л.Зайцева Техред М.Дидык рректор амборс акаэ 811 Тираж 406 ПодписноеНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 роизводственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 10 10Способ измерения поля градиента показателя преломления, включающий осве" щенке объекта, расположенного в рабочей зоне измерительной системы, ре 1 гистрацию прошедшей световой волны и обработку полученных данных, о тл и ч а ю щ и й с я тем, что, с целью повышения точности и расширения динамического диапазона измерений, предварительно освещают сканируемым лучом рабочую зону измерительной системы без исследуемого объекта,фиксируя отклонения луча от невоэмущенного направления распространенияв каждой точке рабочей эоны, и запоминают эти результаты, этим же скани"руемым лучом освещают объект послеего помещения в рабочую зону с фиксацией отклонения луча в каждой точкеобъекта, а о величине градиента показателя преломления судят по разности зафиксированных отклонений в каждой точке рабочей зоны.
СмотретьЗаявка
4496280, 21.10.1988
ИНСТИТУТ ПРОБЛЕМ МЕХАНИКИ АН СССР
ГУМЕННИК ЕВГЕНИЙ ВИКТОРОВИЧ
МПК / Метки
МПК: G01N 21/41
Метки: градиента, показателя, поля, преломления
Опубликовано: 23.03.1991
Код ссылки
<a href="https://patents.su/4-1636736-sposob-izmereniya-polya-gradienta-pokazatelya-prelomleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения поля градиента показателя преломления</a>
Способ управления интенсивностью обрабатывающего пучка света, направляемого в заданную область удаленного объекта, и устройство для его осуществления
Номер патента: 1339479
Опубликовано: 23.09.1987
Автор: Черкасов
МПК: G02F 1/17
Метки: заданную, интенсивностью, направляемого, область, обрабатывающего, объекта, пучка, света, удаленного
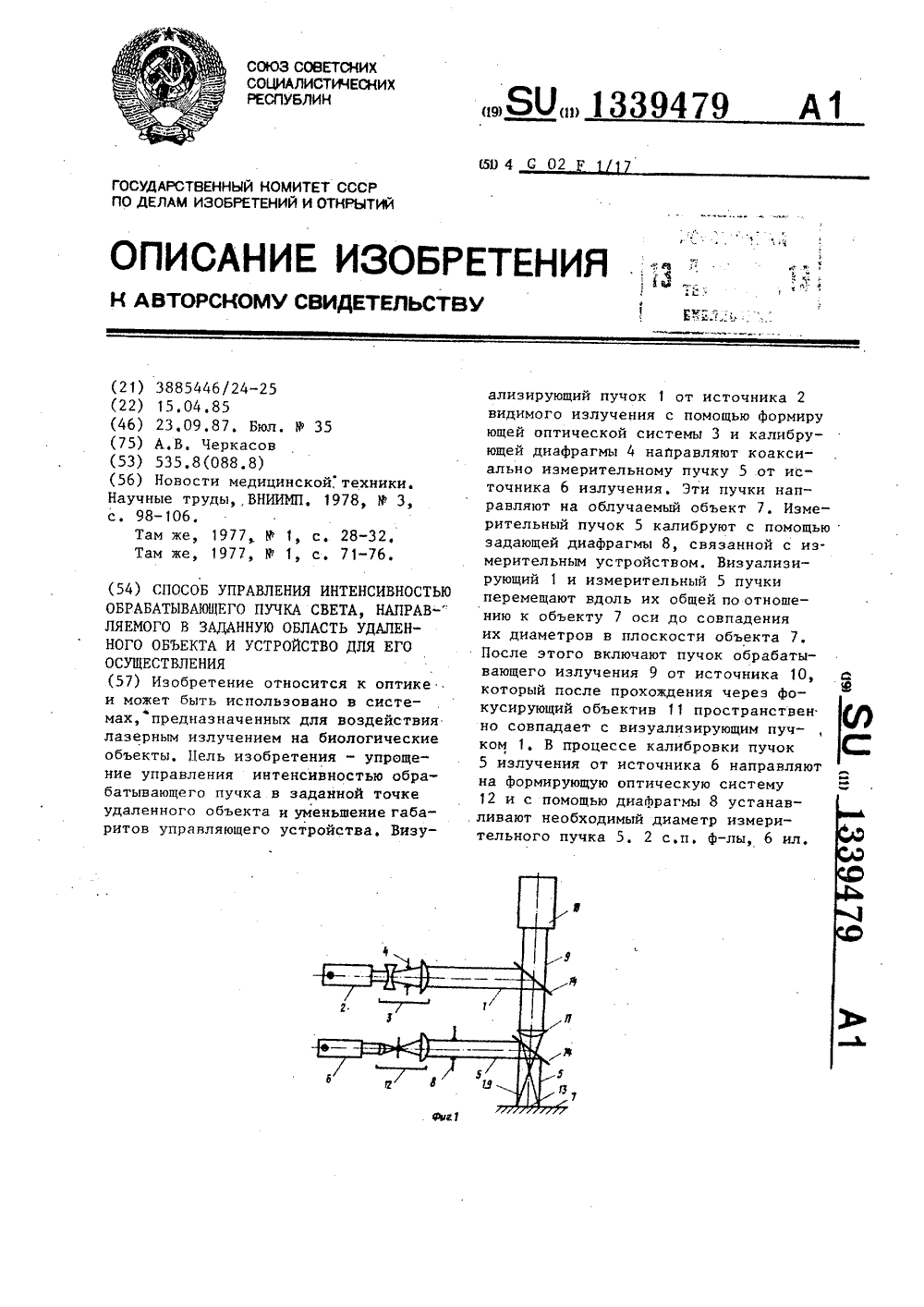
...(источник 6, оптическая система 12, диафрагма 8, зеркало 14) установлен таким образом, чтопучки всех трех каналов на выходеустановки соосны, Наводка устройстваосуществляется перемещением еговдоль оптической оси пучка 5, приэтом не меняется его репер на объекте 7, точно обозначая границы области облучения, при совпадении с которыми реперов пучков 1 и 9 обеспечивается необходимый режим облучения,Реперы пучков 1 и 9 при перемещенииотносительно плоскости объекта 7 об-.лучения изменяют свои размеры, Приэтом в зависимости от положения 1518 плоскости объекта 17. обеспечивается точное наведение двух режимовобработки: режим облучения, обозначенный репером управляющего пучка 5 в положении 17 и режим максимальнойплотности мощности облучения,...
Способ определения перемещений поверхности объекта

Номер патента: 1828995
Опубликовано: 23.07.1993
Автор: Гриневский
МПК: G01B 11/16
Метки: объекта, перемещений, поверхности
...пучка 10 и опорную деталь 5 освещают поверхность объекта 6 под углом, большим угла полного внутренне 1828995го отражения материала опорной детали 5. Опорный пучок отражается от участков поверхности опорной детали 5, не контактирующих с обьектом 6, отражается зеркалом 11, . проходит через светофильтр 12 и отражается зеркалами 13, 14, 15 на регистрирующую среду 8.Опорная деталь 5 представляет собой отражательную призму-куб. Может быть использована также призма Дове, Оптическая система 7 состоит, например, иэ двух положительных линз с равными фокусными расстояниями. Оптическая система 7 формирует изображение объекта 6 в плоскости регистрирующей среды 8 с единичным увеличением.Изобретение выполняется следующим образом,Осуществляют...
Устройство для рентгеновского дифракционного исследования объектов и способ установки зеркала полного внешнего отражения в пучке рентгеновского излучения

Номер патента: 883726
Опубликовано: 23.11.1981
МПК: G01N 23/207
Метки: внешнего, дифракционного, зеркала, излучения, исследования, объектов, отражения, полного, пучке, рентгеновского, установки
...ось пучка. При этом блок зеркала 3 полного внешнего отражения ус фтанавливают таким образом, что зеркало 10 располагается на уровне, выше предполагаемого пучка ретгеновскогоизлучения. Одновременно с помощьюсредств 15 наклона двух задних опор6 платформы 5 ось пучка рентгеновского излучения устанавливают параллельно продольной оси отражающей поверхности зеркала 10, и, следовательно, .перпендикулярно линии, на которой26расположены. точки контакта задних опор 6, имеющих одну степень свободы. С помощью средств 15 устанавливают плоскость зеркала 10 так, что ее образующая, параллельная попереч- н ной оси, располагается в горизонтальной плоскости, т.е, перпендикулярно плоскости фокусировки рентгеновского пучка зеркалом 3 полного внешнего...
Устройство для передачи света между подвижным и неподвижным объектами

Номер патента: 1386050
Опубликовано: 30.03.1988
Авторы: Манфред, Ульрих, Хельмут, Хольгер, Хорст
МПК: G02B 6/44
Метки: между, неподвижным, объектами, передачи, подвижным, света
...на барабане 4, установленном с возможностью вращения в направлении стрелки 15, неподвижную планку 16, ориентированную вдоль направления 10, на которой закреплена другая концевая часть 17 элемента 1, а верхняя часть 18 которой служит опорной поверхностью для гибкого направляющего элемента 1, крепежные хомутики 19 для прикреп ления кабеля 2 к элементу 1 по всей его длине, Предпочтительно такое закрепление кабеля 2, когда плоскость ленты 1 проходит через диаметральную плоскость 20 кабеля 2,Вращение барабана 4 и перемещение платформы 5 позволяют направить сфокусированный пучок 13 в любую точку носителя записи 14. При перемещении платформы 5 гибкий элемент 1 разматывается или сматывается по опорной поверхности 18, Выполнение элемента 1 в...
Устройство для записи голограммы объекта во встречных пучках

Номер патента: 911450
Опубликовано: 07.03.1982
Автор: Турухано
МПК: G03H 1/04
Метки: встречных, голограммы, записи, объекта, пучках
...фотопластинке,эта волна взаимодействует с волной, идущей непосредственно от источника и являющейся опорной волной, создавая интерференционную картину. Результирующая интерференционная картина промодулирована,. а глубина ее модуляции зависит от соотношения интенсивностей пучков й, а также от вибростойкости установки. В силу того,.что световой пучок за голографической фотопластинкой .сходящийся, плотность энергии растет по мере удаления от фотопластинки. Поэтому, устанавливая объект на различных расстояниях от голографической фотопластинки, можно варьировать интенсивность объектного пучка с тем,чтобы найти оптимальное значениесоотношения й. 15 Таким образом, использование собирающей линзы дает существенноепреимущество перед...
Предыдущий патент: Способ анализа термообработанного дифенилметандиизоцианата
Следующий патент: Способ измерения показателя преломления жидкости
Случайный патент: Состав для ретуширования фотошаблонов