Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
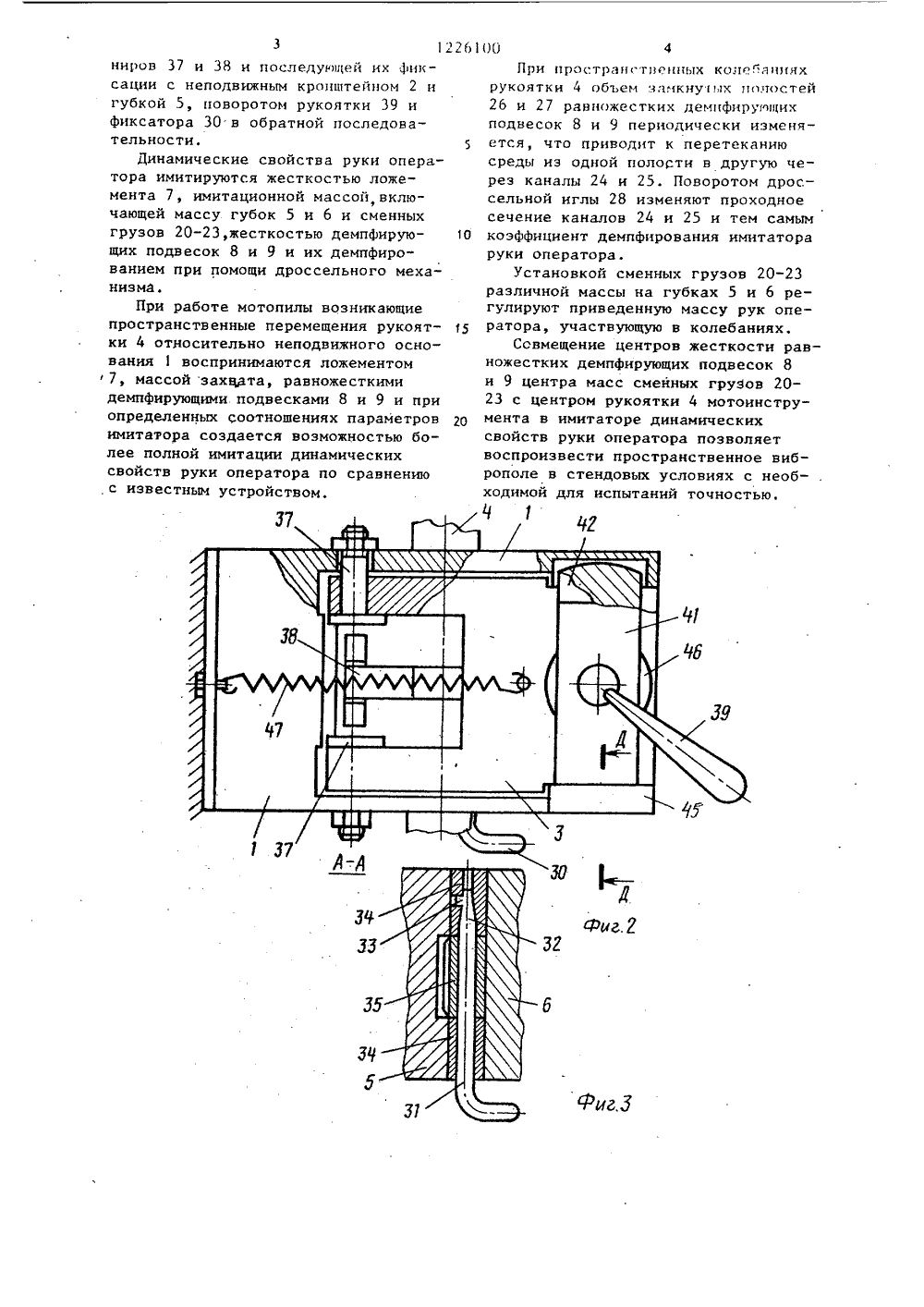
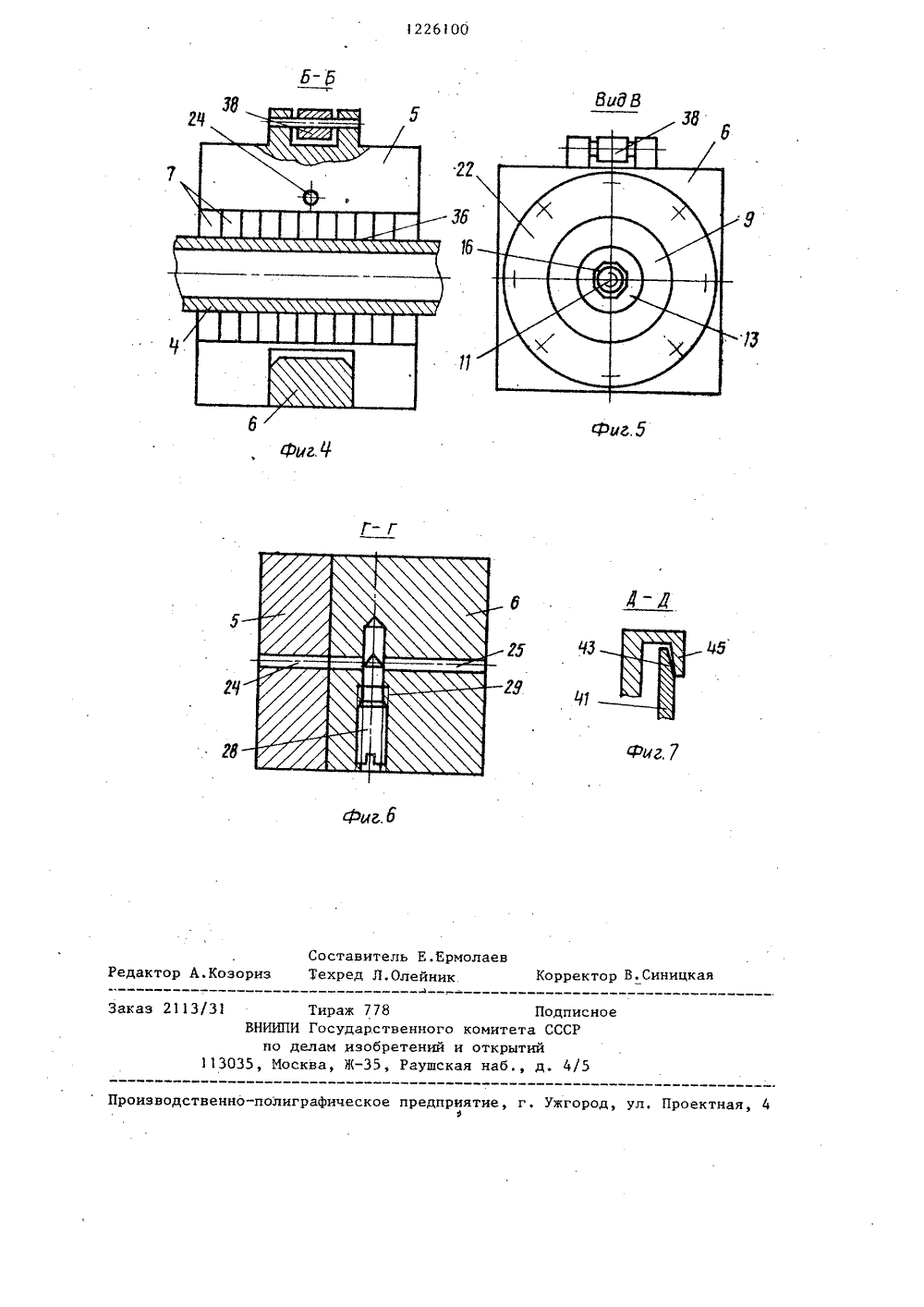
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 1 М 7( ИСАНИЕ ИЗОБРЕТЕН рующи отл 23 22 б ГосудАРственный комитет сссРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ АВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Пермский политехнический институт(54)(57) 1 . ИМИТАТОР ДИНАМИЧЕСКИХСВОЙСТВ РУКИ ОПЕРАТОРА К СТЕНДУ ДЛЯИСПЫТАНИЙ МЕХАНИЗИРОВАННЫХ ИНСТРУМЕНТОВ, содержащий основание, размещенные на нем опорные кронштейны,один из которых установлен с возможностью перемещения и последующейфиксации, а также зажимные губки сложементом для рукоятки Инструментасвязанные с опорными кронштейнами аиЯОа) 1226100 осредством демпфи х подвесок,сменные грузы, ичающ и й с я тем, что, с целью обеспечения более полной имитации динамических свойств руки оператора и повышения удобства эксплуатации, эажимные губки связаны шарнирно, а подвижный кронштейн установлен на основании на оси, соосной с осью шар нира, связывающего эажимные губки, и подпружинен относительно основания, при этом ложемент выполнен составным в виде набора упругих разрезных шайб плоскость разъема которых совмещена с плоскостью разъема зажимных губок.2, Имитатор по п. 1, о т л и ч аю щ и й с я тем, что сменные грузы выполнены в виде набора колец, предназначенных для прикрепления зажимных губок к демпфирующим подвескам.) ретение относится к средствамвцбрациопных испытаний механизированных инструментов, например мотоиил.Цель изобретения - обеспечение более полной имитации динамическихсвойств руки оператора и повышениеудобства эксплуатации.На Фиг. 1 изображен имитатор динамических свойств руки оператора,общий вид; на фиг. 2 - то же, видсверху; на фиг, 3 - разрез А-А нафиг, 1; на фиг. 4 - разрез Б-Б нафш . ); на фиг. 5 - вид В на фиг. 1;на Фиг. 6 - разрез Г-Г на фиг. 1; нафиг.- разрез Д-Д на фиг. 2.Имитатор динамических свойств руки оператора содержит неподвижноеоснование 1, опорные кронштейны 2 и3, захват для рукоятки 4 мотоинструмента, выполненный в виде зажимныхгубок 5. и 6, ложемент 7, установленный между губками 5 и 6, а также равножесткие демпфирующие подвески 8 и9, расположенные между опорнымикронштейнами 2 и 3 и губками 5 и 6.Каждая равножесткая демпфирующая подвеска 8 и 9 выполнена из полимерного материала, например резины, иимеет вид соосно усеченных пустотелых конусов с углами при вершине,равными 109+1 . Меньшими основаниями равножесткие демпфирующие подвески 8 и 9 закреплены при помощи винтов 10 и 11, шайб 12 и 13 и гаек 1419 в опорных кронштейнах 2 и 3,большими основаниями - в гнездахэажимных губок 5 и 6 при помощи сменных грузов 20-23, выполненных ввиде колец. Дроссельный механизмвыполнен в виде каналов 24 и 25, связывающих между собой внутренние полости 26 и 27 равножестких демпфирующих подвесок 8 и 9 и дроссельнойиглы 28, установленной в резьбовомотверстии 29 призмы 6. Фиксатор 30,выполненньп в виде стержня 31 с ко ническим концом 32 и выступом 33,установлен во втулках 34 и 35 губок5.и 6,Ложемент 7 выполнен из набора разрезных шайб из упругодемнфирующего материала, например резины.Одна половина набора шайб установлена в зажимной губке 5, а другая половина - в эажимной губке 6 и закреплена, например, при помощи клея.Отверстия 36 в шайбах могут выполняться различной Формы для обеспечения охвата рукояток мотоинструмен.та различной конструкции, Плоскость разъема ложемента 7 совмещена с плоскостью разъема губок 5 и 6,Подвижный кронштейн 3 связан с неподвижным основанием 1 при помощи шарнира 37. Зажимная губка 6 связана с неподвижным кронштейном 2 при помощи шарнира 38, Шарниры 37 и 38 расположены соосно в плоскости разъема губок 5 и 6, Фиксация подвижного кронштейна 3 относительно неподвижного основания 1 производится при помощи поворотного заклинивающего механизма, состоящего иэ рукоятки 39, жестко связанной с осью 40, и подвижной пластины 41 со скосами 42 и 43 на концах пластины 41, расположенными в гнездах 44 и 45 неподвижного кронштейна 2, а также тарельчатой пружины 46, установленной между пластиной 41 и подвижным кронштейном 3. Последняя установлена для компенсации зазоров и повьппения надежности фиксации подвижного кронштейна 3 с неподвижным кронштейн ном 2, Подвижный кронштейн 3 связан с неподвижным основанием 1 при помощи пружины 47 растяжения.Такая конструкция имитатора динамических свойств руки оператора позволяет совместить центр масссменных грузов 20-23, центры жесткости равножестких демпфирующихподвесок 8 и 9 с центром рукоятки4 мотоинструмента. Работа с имитатором динамических свойств руки оператора осуществляется в следующей последовательности.Фиксатор 30 поворачивают относительно осевой оси до выхода выступа 33 из гнезда и перемещают вдоль втулок 34 и 35 до момента разъединения губок 5 и 6. Рукоятку 39 поворачивают до момента выхода концов со скосами 42 и 43 подвижной пластины 41 из гнезд 44 и 45 неподвижного кронштейна 2. Под действием пружины 47 растяжения подвижный кронштейн 3, а также зажимная губка 6 с ложе- ментом 7 поворачиваются относительно осей шарниров 37 и 38. Рукоятка 4 мотоинструмента устанавливается на набор шайб в зажимной губке 5 и закрепляется в имитаторе динайических свойств руки оператора путем поворота зажимной губки и подвижного кронштейна 3 относительно осей шарЭнирон 37 и 38 и последующей их Фиксации с неподвижным кронштейном 2 и губкой 5, поворотом рукоятки 39 и фиксатора 30 в обратной последовательности. 5Динамические свойства руки оператора имитируются жесткостью ложе- мента 7, имитационной массой,включающей массу губок 5 и 6 и сменных грузов 20-23,жесткостью демпфирую- О щих подвесок 8 и 9 и их демпфированием при помощи дроссельного механизма.При работе мотопилы возникающие пространственные перемещения рукоят ки 4 относительно неподвижного основания 1 воспринимаются ложементом7, массой захвата, равножесткими демпфирующими подвесками 8 и 9 и при определенных соотношениях параметров 20 имитатора создается возможностью более полной имитации динамических свойств руки оператора по сравнениюс известным устройством. При пространгтненных колеалиях рукоятки 4 объем эа кнусых полостей 26 и 27 ранножестких демпфиругщнх подвесок 8 и 9 периодически изменяется, что приводит к перетеканию среды из одной полости в другую через каналы 24 и 25. Поворотом дроссельной иглы 28 изменяют проходное сечение каналов 24 и 25 и тем самым коэФфициент демпфирования имитатора руки оператора.установкой сменных грузов 20-23 различной массы ка губках 5 и б регулируют приведенную массу рук оператора, участвующую в колебаниях.Совмещение центров жесткости равножестких демпфирующих подвесок 8 и 9 центра масс сменных грузов 20- 23 с центром рукоятки 4 мотоинструмента в имитаторе динамических свойств руки оператора позволяет воспроизвести пространственное виброполе в стендовых условиях с необходимой для испытаний точностью.1226100 Вид В Фи Г б Подписноомитета СССР каз 2113/3 ираж 778осударственногоам изобретенийа, Ж, Раушск ВНИИПИ по дел 113035, Моск открытиия наб., д. 4 ул. Проектная Производственно-полиграфическое предприятие, г, Ужг Составитель Е,Ермолаевактор А,Козориз Техред Л.Олейник Корректор В.Синицк
СмотретьЗаявка
3696610, 27.01.1984
ПЕРМСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
КЕЛЛЕР ЭРНСТ АЛЕКСАНДРОВИЧ, ПУЗЫРЕВ ОЛЕГ НИКОЛАЕВИЧ, ШЕВЕЛЕВ ПАНТЕЛЕЙМОН ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G01M 7/00
Метки: динамических, иммитатор, инструментов, испытания, механизированных, оператора, руки, свойств, стенду
Опубликовано: 23.04.1986
Код ссылки
<a href="https://patents.su/4-1226100-immitator-dinamicheskikh-svojjstv-ruki-operatora-k-stendu-dlya-ispytaniya-mekhanizirovannykh-instrumentov.html" target="_blank" rel="follow" title="База патентов СССР">Иммитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов</a>
Манипулятор

Номер патента: 963848
Опубликовано: 07.10.1982
МПК: B25J 11/00
Метки: манипулятор
...сопротивления одной пружины, то на валу б после деформации всех пружин действует максимальный момент ф, определяемый из соотношения где 7- - количество пружин,КПД передачи, состоящей изролика 31 и пружины 23.Поток мощности направлен от двигателя 35 к валу б, связанному сшестернями 5. Шестерни, вращаясь,перемещаются по рейкам 3 вниз иподнимают рычаг 7 на необходимуювысоту позиционирования захвата 16соответственно направлению вращениярукоятки 15 управления.Если рукоятка 15 остановлена содновременным выключением двигателя 35, ведомый поводок 19 роликовоймуфты 17, получая вращение от вала бнследствие аккумулированного крутящего момента через звездочки 10 - 12и цепные передачи 13, 14, эаклининает ролики 21 и 22 в корпусе 20 и...
Способ определения механических свойств материалов при динамическом нагружении

Номер патента: 244680
Опубликовано: 01.01.1969
Авторы: Анисимов, Васильев, Кузнецова, Платов, Проворный, Студниц, Шадхин
МПК: G01N 21/33, G01N 3/30
Метки: динамическом, механических, нагружении, свойств
...свойств материалов.На фиг. 1 изображен образец для испытания по предложенному способу; на фиг. 2 - схема испытаний, 3 туемый образец 1 имеет на нерабочих сквозные отверстия 2, а на одном из инертную массу 3. Хвостовиком 4 обзакрепляют в середине гибкой пластины пластину устанавливают наковальню б азной формы, охватывающую образец. ытания образца производят следующим Включают вращение барабана фоторегистратора 7 и производят выстреливание бойка, который по пути своего движения включает лампу-вспышку 8 и ударяет по наковальне, сообщая гибкой пластине свою энергию. Гибкая пластина начинает изгибаться и вовлекает в движение закрепленный в ней хвостовик образца. Вследствие наличия инертной массы д на незакрепленном конце образца...
Устройство для исследования динамических свойств грунтов

Номер патента: 577425
Опубликовано: 25.10.1977
Автор: Прокудин
МПК: G01N 3/10
Метки: грунтов, динамических, исследования, свойств
...18. Для регулирования пульсепии бокового цавления служит предохранительный клепан 20, Контроль давления в ресивере производится по манометру1, а контроль начель- ц иой деформации - по индикатору 22, Пульсацию бокового давления обеспечивает поршень %3 и мембрана 24, Перемещение поршня Вниз Об 8 спечивает Возвратная пружина 25, е вверх - привод, выполненный в виде план-(и шЬйбы 26, установленной под углом 1- к горизонту и связанной гибким Валом 27 с редуктором 28, Редуктор приводится во вращение через муфту 29 От электромоторе 3 О, Контроль величины пульсеци: бокового дев ления, вертикальной деформации, ,горизонтальных и вертикальных колебещй грунта образца осуществляется с помощью дат гиков 31-34,Прибор работает слецчощим...
Способ получения модифицированных целлюлозныхматериалов12в настоящее время известны способы придания целлюлозным материалам гидрофобных свойств с помощью различных гидрофобизирующих веществ, которые либо сорбир

Номер патента: 166443
Опубликовано: 01.01.1964
Авторы: Андрианов, Дабагова, Иванов, Роговин
МПК: C08F 251/02
Метки: веществ, время, гидрофобизирующих, гидрофобных, известны, которые, либо, материалам, модифицированных, настоящее, помощью, придания, различных, свойств, сорбир, способы, целлюлозным, целлюлозныхматериалов12в
...1 г акрилинитрила и 1 г вискозной штапельной ткани.Эмульсию продувают инертным газом и после термостатировапия при 30 С приливают 3 - 5 мм раствора Се(1 Н 4),(ХОз) е в 1 Х О НИОз. После 120 - 150 мин выдерживанияэмульсии при этой температуре продукт привитой сополимеризации отделяют, промывают и сушат. Содержание кремния составляет 0,4%,25 В настоящее время известны способы придания целлюлозным материалам гидрофобных свойств с помощью различных гидрофобизирующих веществ, которые либо сорбируются целлюлозным волокном (мыльно-парафиновые эмульсии), либо химически взаимодействуют с целлюлозой (катионактивные препараты).В первом случае ткани теряют водоотталкивающие свойства в процессе стирки, во 1 втором случае пропитку проводят при...
Установка для определения физико-механических свойств грунта методом динамического зондирования

Номер патента: 489990
Опубликовано: 30.10.1975
Авторы: Горелов, Ильичев, Лебедев, Черников, Шевцов
МПК: G01N 3/48
Метки: грунта, динамического, зондирования, методом, свойств, физико-механических
...сопротивления грунта в зависимости от глубины погружения зонда,Установка для определения физико-механических свойств грунта методом динамического зондирования, включающая стойки, пенетрационный наконечник, наковальню и молот с захватом и сбрасывателем, о т л и ч а ю щ а яс я тем, что, с целью повышения чувствительности и расширения области применения, она выполнена с датчиком давления, а наковальня в виде связанной с ним гидрополости, в которой размещен поршень, жестко соединенный через шток с пенетрационным наконечником,20 Изобретение относится к области исследований прочности грунтов с целью использованияих для строительства, а именно к установкамдля динамического зондирования,Известные установки для определения...
Предыдущий патент: Способ испытания трубопроводов на герметичность и прочность
Следующий патент: Стенд для испытания изделий на импульсные перегрузки
Случайный патент: Лопата