Устройство для измерения динамических параметров вращающихся валов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1176187
Авторы: Астанин, Ерусланова, Ивлиев


Текст
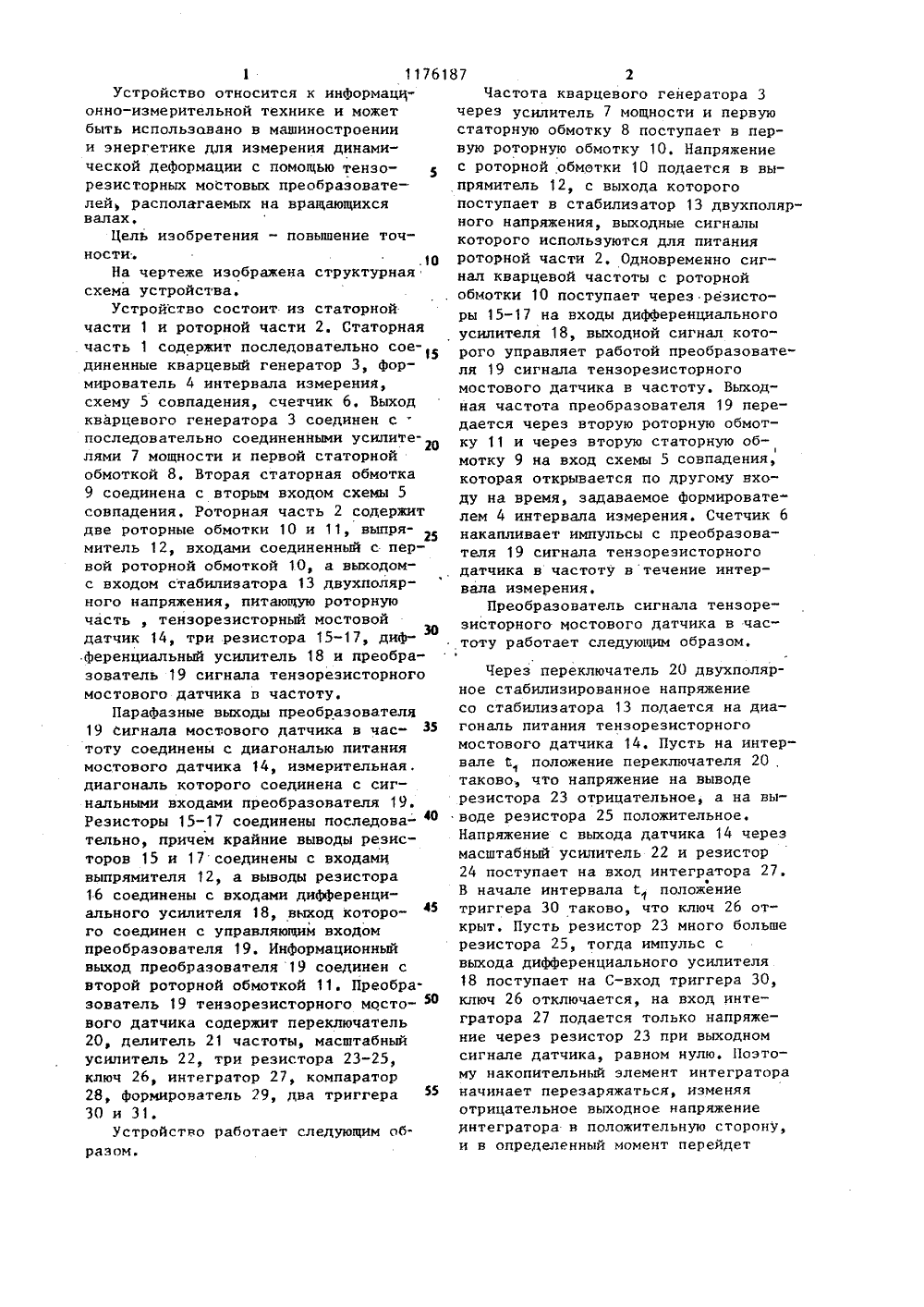
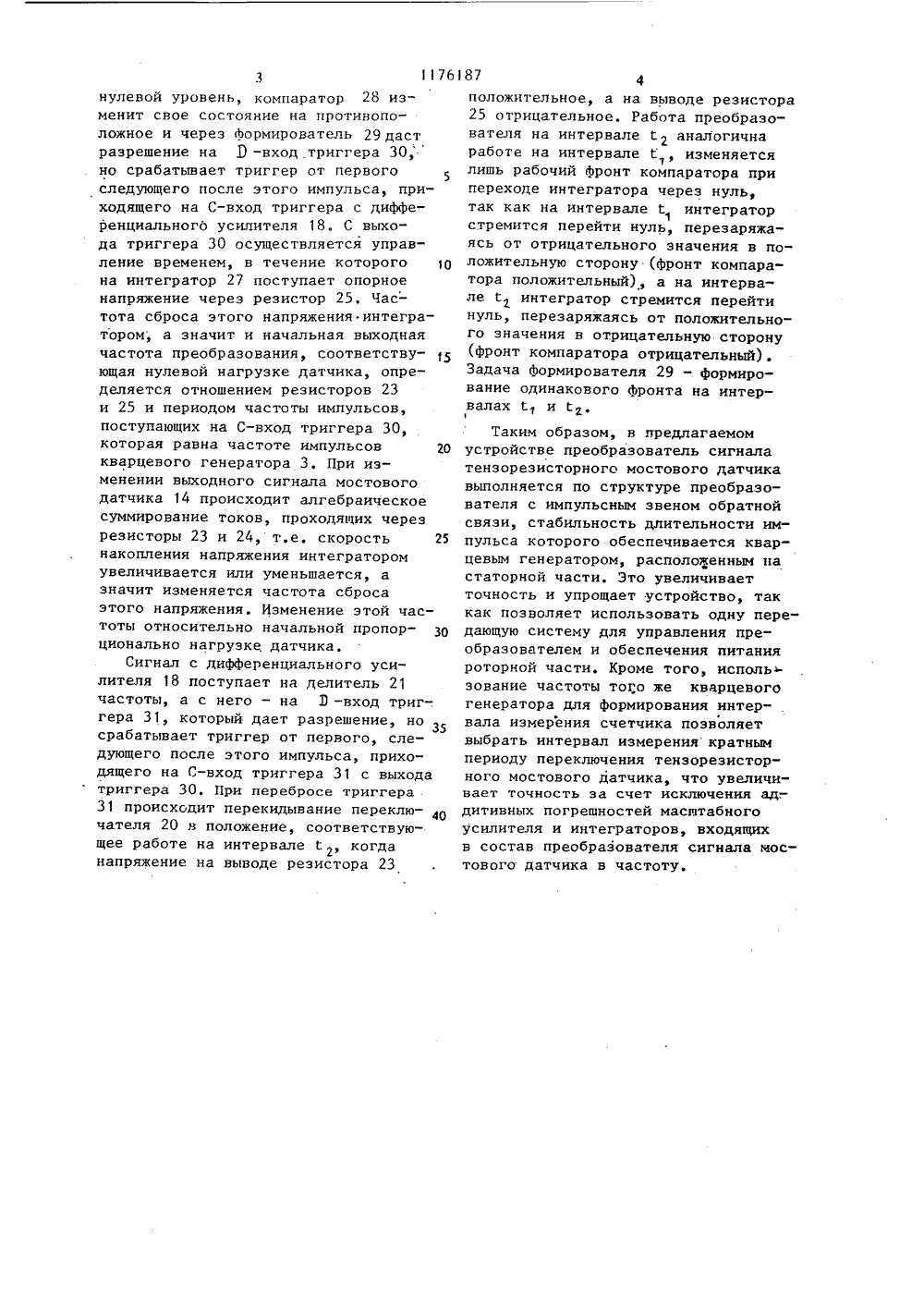
)3.цш 1 йоЯР ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ АВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Научно-исследовательскийи конструкторский институт испытательных машин, приборов и средствизмерения масс(56) Мартяшин А.И Шахов Э.К. Преобразователи электрических параметров для систем контроля и измерения.М.: Энергия, 1976, с. 262,Патент ФРГ У 2.148.482,кл, С 01 1. 3/ 10, 1979.(54)(57) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯДИНАМИЧЕСКИХ ПАРАМЕТРОВ ВРАЩАЮЩИХСЯВА 310 В, состоящее из статорной части,содержащей усилитель мощности и связанную с ним первую статорную обмотку, последовательно соединенныекварцевый генератор, Формировательинтервала измерения, схему совпадения.и счетчик, причем второй вход,801176187 схемы совпадения соединен с второйстаторной обмоткой, и роторной части, содержащей последовательно соединенные первую роторную обмотку,выпрямитель, стабилизатор двухполярного напряжения питания роторнойчасти, преобразователь сигнала тензорезисторного мостового датчика вчастоту, парафазные выходы которогосоединены с диагональю питания тензорезисторного мостового датчика,измерительная диагональ которого соединена с сигнальными входами преобразователя сигнала мостового датчикав частоту, информационный выход которого соединен с второй роторной обмоткой, о Ф л и ч а ю щ е е с ятем, что с целью повышения точности, в него введены дифференциальныйусилитель,. выход которого соединен суправляющим входом преобразователясигнала тензорезисторного мостовогодатчика в частоту, а входы соединеныс первой роторной обмоткой, при этом .выход кварцевого генератора соединенс выходом усилителя мощности.1 1176Устройство относится к информационно-измерительной технике и можетбыть использовано в машиностроениии энергетике для измерения динамической деформации с помощью тензорезисторных мостовых преобразователей, располагаемых на вращающихсявалах,Цель изобретения - повышение точности,,10На чертеже изображена структурнаясхема устройства.Устройство состоит из статорнойчасти 1 и роторной части 2. Статорнаячасть 1 содержит последовательно соединенные кварцевый генератор 3, формирователь 4 интервала измерения,схему 5 совпадения, счетчик 6. Выходкварцевого генератора 3 соединен споследовательно соединенными усилиТелями 7 мощности и первой статорнойобмоткой 8, Вторая статорная обмотка9 соединена с вторым входом схемы 5совпадения, Роторная часть 2 содержитдве роторные обмотки 10 и 11, выпрямитель 12, входами соединенный с первой роторной обмоткой 10, а выходомс входом стабилизатора 13 двухполярного напряжения, питающую роторнуючасть , тензорезисторный мостовойдатчик 14, три резистора 15-17, диф 30.Ференциальный усилитель 18 и преобразователь 19 сигнала тензорезисторногомостового датчика в частоту.Парафазные выходы преобразователя19 сигнала мостового датчика в частоту соединены с диагональю питаниямостового датчика 14, измерительная.диагональ которого соединена с сигнальными входами преобразователя 19.Резисторы 15-17 соединены последова- ф 0тельно, причем крайние выводы резисторов 15 и 17 соединены с входамивыпрямителя 12, а выводы резистора16 соединены с входами дифференциального усилителя 18, выход которого соединен с управляющим входомпреобразователя 19. ИнФормационныйвыход преобразователя 19 соединен свторой роторной обмоткой 11. Преобразователь 19 тензорезисторного мостового датчика содержит переключатель20, делитель 21 частоты, масштабныйусилитель 22, три резистора 23-25,ключ 26, интегратор 27, компаратор28, формирователь 29, два триггера30 и 31,Устройство работает следующим об.разом. 187 2Частота кварцевого генератора 3через усилитель 7 мощности и первуюстаторную обмотку 8 поступает в первую роторную обмотку 10. Напряжениес роторной обмотки 10 подается в выпрямитель 12, с выхода которогопоступает в стабилизатор 13 двухполярного напряжения, выходные сигналыкоторого используются для питанияроторной части 2. Одновременно сигнал кварцевой частоты с роторнойобмотки 10 поступает через резисторы 15-17 на входы дифференциальногоусилителя 18, выходной сигнал которого управляет работой преобразователя 19 сигнала тензорезисторногомостового датчика в частоту, Выходная частота преобразователя 19 передается через вторую роторную обмотку 11 и через вторую статорную об 1мотку 9 на вход схемы 5 совпадения,которая открывается по другому входу на время, задаваемое формирователем 4 интервала измерения. Счетчик 6накапливает импульсы с преобразователя 19 сигнала тензорезисторногодатчика в частоту втечение интервала измерения,Преобразователь сигнала тензорезисторного мостового датчика в частоту работает следующим образом.Через переключатель 20 двухполярное стабилизированное напряжение со стабилизатора 13 подается на диагональ питания тензорезисторного мостового датчика 14. Пусть на интервале й положение переключателя 20 таково, что напряжение на выводе резистора 23 отрицательное, а на выводе резистора 25 положительное. Напряжение с выхода датчика 14 через масштабный усилитель 22 и резистор 24 поступает на вход интегратора 27. В начале интервалаположение триггера 30 таково, что ключ 26 открыт, Пусть резистор 23 много больше резистора 25, тогда импульс с выхода дифференциального усилителя 18 поступает на С-вход триггера 30, ключ 26 отключается, на вход интегратора 27 подается только напряжение через резистор 23 при выходном сигнале датчика, равном нулю. Поэтому накопительный элемент интегратора начинает перезаряжаться, изменяя отрицательное выходное напряжение интегратора в положительную сторону, и в определенный момент перейдет763нулевой уровень, компаратор 28 изменит свое состояние на противоположное и через Формирователь 29 даст разрешение на Д -вход триггера 30; но срабатывает триггер от первого следующего после этого импульса, приходящего на С-вход триггера с дифференциального усилителя 18. С выхода триггера 30 осуществляется управление временем, в течение которого О на интегратор 27 поступает опорное напряжение через резистор 25. Час- тота сброса этого напряжения интегратором, а значит и начальная выходная частота преобразования, соответствующая нулевой нагрузке датчика, определяется отношением резисторов 23 и 25 и периодом частоты импульсов, поступающих на С-вход триггера 30, которая равна частоте импульсов 20 кварцевого генератора 3. При изменении выходного сигнала мостового датчика 14 происходит алгебраическое суммирование токов, проходящих через резисторы 23 и 24, т.е, скорость 25 накопления напряжения интегратором увеличивается или уменьшается, а значит изменяется частота сброса этого напряжения. Изменение этой частоты относительно начальной пропорционально нагрузке датчика.Сигнал с дифференциального усилителя 18 поступает на делитель 21 частоты, а с него - на 1 -вход триг-. гера 31, который дает разрешение но35 срабатывает триггер от первого, следующего после этого импульса, приходящего на С-вход триггера 31 с выхода триггера 30, При перебросе триггера 31 происходит перекидывание переклю чателя 20 в положение, соответствующее работе на интервале г.2, когда напряжение на выводе резистора 23 87положительное, а на выводе резистора25 отрицательное. Работа преобразователя на интервале С 2 аналогичнаработе на интервале, изменяется1 флишь рабочий Фронт компаратора припереходе интегратора через нуль,так как на интервале Т интегратор1стремится перейти нуль, перезаряжаясь от отрицательного значения в положительную сторону фронт компаратора положительный), а на интервале С интегратор стремится перейтинуль, перезаряжаясь от положительного значения в отрицательную сторону(фронт компаратора отрицательный).Задача Формирователя 29 - формирование одинакового Фронта на интервалах т и Е.1Таким образом, в предлагаемомустройстве преобразователь сигналатензорезисторного мостового датчикавыполняется по структуре преобразователя с импульсным звеном обратнойсвязи, стабильность длительности импульса которого обеспечивается кварцевым генератором, расположенным пастаторной части, Это увеличиваетточность и упрощает устройство, таккак позволяет использовать одну передающую систему для управления преобразователем и обеспечения питанияроторной части, Кроме того, использование частоты того же кварцевогогенератора для формирования интер- .вала измерения счетчика позволяетвыбрать интервал измерения кратнымпериоду переключения тензорезисторного мостового датчика, что увеличивает точность за счет исключения ад-.дитивных погрешностей масштабногоусилителя и интеграторов, входящихв состав преобразователя сигнала мостового датчика в частоту,1176187 Составитель А.Пашковедактор Е.Копча Техред Ж.Кастелевич ектор В.Синицкая 34/41 ВНИИПИ д, 4 н 11303 жгброд, ул. Проектная, 4 ПИ "Патент",или Тираж 897 Государственного ком делам изобретений и о 1 осква, Ж, Раушская Подписнота СССРытий
СмотретьЗаявка
3635083, 17.08.1983
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И КОНСТРУКТОРСКИЙ ИНСТИТУТ ИСПЫТАТЕЛЬНЫХ МАШИН, ПРИБОРОВ И СРЕДСТВ ИЗМЕРЕНИЯ МАСС
АСТАНИН ГЕННАДИЙ ФИЛИППОВИЧ, ЕРУСЛАНОВА ОЛЬГА МИХАЙЛОВНА, ИВЛИЕВ АНАТОЛИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G01L 3/10
Метки: валов, вращающихся, динамических, параметров
Опубликовано: 30.08.1985
Код ссылки
<a href="https://patents.su/4-1176187-ustrojjstvo-dlya-izmereniya-dinamicheskikh-parametrov-vrashhayushhikhsya-valov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для измерения динамических параметров вращающихся валов</a>
Преобразователь код-частота

Номер патента: 1167736
Опубликовано: 15.07.1985
Автор: Ефимов
МПК: H03M 1/86
Метки: «код-частота
...сумматора 4 присходит тольков те моменты, когда на тактируемомвходе преобразователя 5 кода появля"ется сигнал, поступающий с выходацифрового компаратора 3, Ири отсутствии сигнала на тактируемом входепреобразователь 5 кода формирует торого соединен с информационным входом выходного формирователя импульсов и тактируемым входом преобразователя кода.На чертеже дана структурная электрическая схема устройства.Преобразователь содержит сумматор 1, регистр 2, цифровой компара- тор 3, комбинационный сумматор 4, преобразователь 5 кода, выходной формирователь 6 импульсов, шину 7 тактирования, шины 8 входного кода, шины 9 кода режима и выходную шину 10.Первые п входов сумматора 1 подключены к выходам регистра 2, тактируемый вход...
Преобразователь ток-частота

Номер патента: 1628205
Опубликовано: 15.02.1991
МПК: H03M 1/60
Метки: ток-частота
...градиента потенциалов, существующего между подложкойи затвором, способны преодолеватьэнергетический барьер, существующийна границе полупроводник - диэлектрик,т.е. происходит инжекция зарядов вобласть затвора МДП-транзистора. Этоприводит к протеканию компенсирующего тока на вход интегратора 1,полярность которого противоположнаизмеряемому,Напряжение на выходе интегратора1 уменьшается, так как происходит 25интегрирование компенсирующего тока,имеющего более высокий порядок, чемизмеряемый.В момент достижения нуля выходнымнапряжением интегратора 1 срабатывает компаратор 5 нулевого уровня, фиксируюший установление нулевых начальных условий интегратора 1. Триггер 6устанавливается в состояние "О , навыходе формирователя 3 устанавливается...
Мостовой триггер м. и. богдановича
Номер патента: 1084976
Опубликовано: 07.04.1984
Автор: Богданович
МПК: H03K 3/29
Метки: богдановича, мостовой, триггер
...триггер содержит первый 1и второй 2 транзисторы первого типапроводимости, эмиттер каждого изкоторых подключен к общей шине и через соответственно первый 3 и второйА резисторы к базе, а коллекторысоответственно к коллекторам первого 5 и Второго 6 транзисторов второготипа проводимости, эмиттер каждогокоторых дключе к шине пианияи через соответственно тре,ий 7 ичетвертый 8 резисторы к базе, коллекторы первого 1 и второго 2 транзисторов первого типа проводимостиподключены соответственно к первымВыводам пятого 9 и шестого 10 резисторов, коллекторы третьего 11 и четВертого 12 транзисторов первого типа прОводимости подключены соответстВснно к базам первого 1 и второго 2транзисторов первого типа проводимости,. эмиттеры - к...
Преобразователь сигнала датчика перемещения в частоту

Номер патента: 1550619
Опубликовано: 15.03.1990
Автор: Латышев
Метки: датчика, перемещения, сигнала, частоту
...2. Гармонический сигнал с выхода усилителя 2 преобразуется в постоянное напряжение преобразователем 3, которое поступает на вход аналогоцифрового преобразователя 5. Двоичный код аналого-цифрового преобразо 35 вателя 5, пропорциональный величине напряжения первой гармоники входного сигнала, управляет двоичным умножителем 6, на частотный вход которого поступают импульсы опорной частоты от генератора 7 импульсоЪ. Выходнойсигнал двоичного умножителя б, поступающий на выход 9, пропорционален напряжению первой гармоники сигнала 45 датчика перемещения, С помощью фазового детектора 4 формируется сигнал направления перемещения на выходе 10.Выходной сигнал 4 датчика переме 50 щений индуктивного типа, например вращающегося трансформатора,...
Преобразователь частота-широтноимпульсный сигнал

Номер патента: 647864
Опубликовано: 15.02.1979
Авторы: Катренко, Корниенко, Нейштадт
МПК: H03K 13/00
Метки: сигнал, частота-широтноимпульсный
...10 находятся в исходном 20состоянии, дополнительный счетчик 2Через логический элемент ИЛИ 9 заполняется импульсами тактовой частотыИмпульс измеряемой частоты, длительностью равный периоду тактовойчастоты, взводит триггеры 3 и 10 иобнуляет делитель тактовой частоты6 и основной счетчик 1. При этомлогический элемент И 7 закрывается,а импульсы тактовой частоты черезОткрывшийся логический элемент И 5поступают на вход делителя тактовойчастоты б, который делит тактовуючастотуна К, С выхода делителя 6импульсы частоты 1 К поступают навход основного счетчика 1 и черезлогический элемент ИЛИ 9 - на входдополнительного счетчика 2.Поскольку счетчик 2 был уже заполнен на какую-то величину тактовойчастоты, а .емкости счетчиков 1 и 2 4 Оодинаковы,...
Предыдущий патент: Емкостной преобразователь усилия
Следующий патент: Устройство для измерения момента на вращающемся валу
Случайный патент: Резиновая смесь для изготовленияфутеровок шаровых мельниц