Способ автоматического регулирования различных процессов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 86099
Автор: Альтерман
Текст
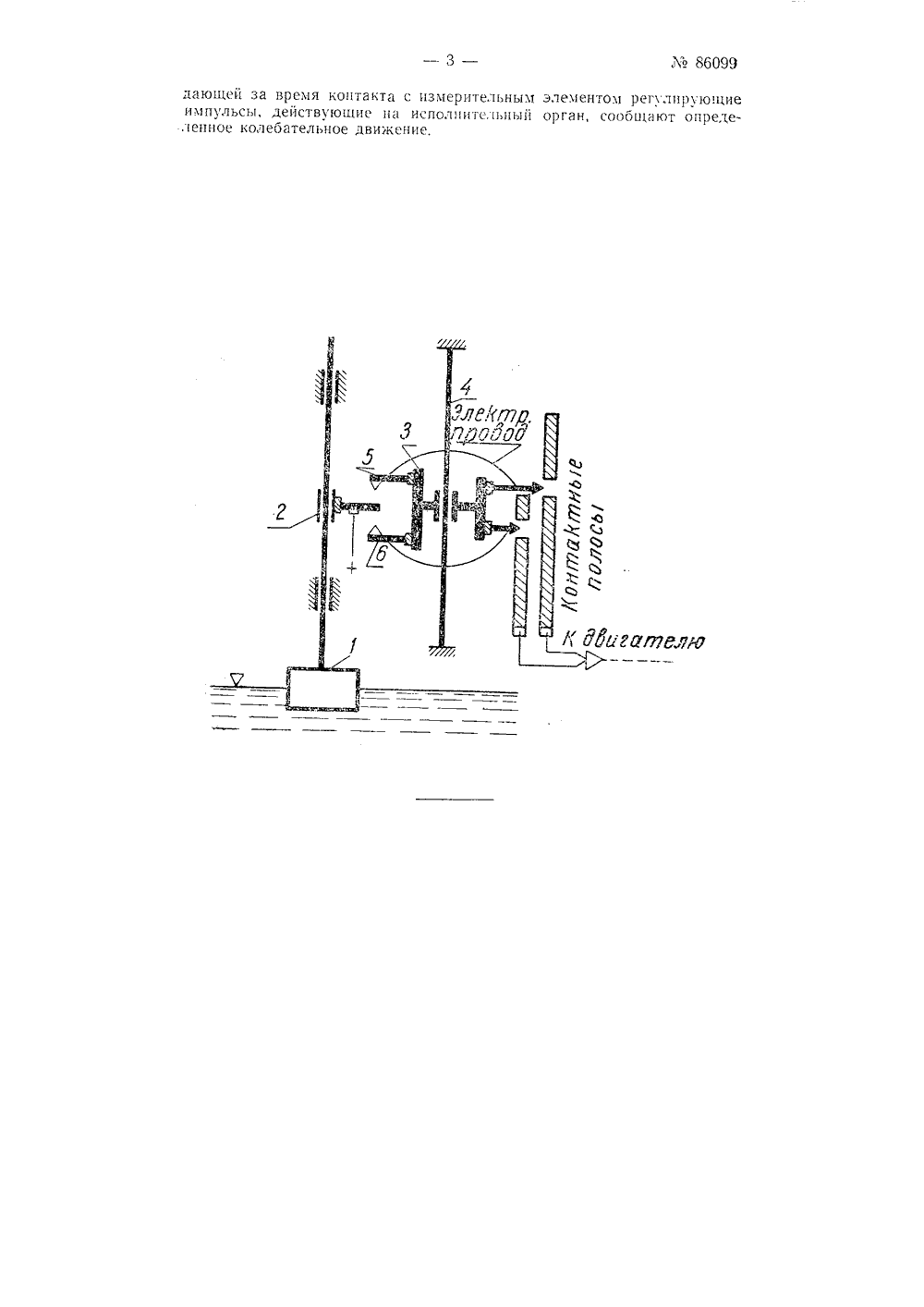
Класс 60, 19 СССР л ИСАНИЕ ИЗОБРЕТЕНИЯАВТОРСКОМУ СВИДЕТЕЛЬСТВУ Д, 3. Альтерма СПОСОБ АВТОМАТИЧЕСКОГО РАЗЛИЧНЫХ ПРЕГУЛ И РОВАНЕССОВ 31 явлено 18 феьра:5 1919 года за М 811" 101 скцику ССС 1 пряОГО рег 5 лировяни 5 ПО(Зуиовя-ф яття (е регулирование по производной от регуливеличине внешнего воздсйсгвуюшсго фактаВ обцем случае) лишь В сочетании с осьа-Ут я. ЭТО Опрсделяс 1 неи.1 бежцость ой связи органов управления с органом рсорганом) прц непрямом регулировании гствует решающий эффект сяморегугИрев 1- ное решение принципов Ползуцовя-Уатта частном рсшсцци иерционнык рсгул 5 Торов ость предлагаемого способа зя:(лючяетсяминимально: о яицамичсского откло:ения от заданно, о зцаче:шя, прц цяр шепни уста мальцой скорости завершения псрскоднык гемсцту цли ведомой цм контактной карет;юбом положении и создгношсй за время элементом рсгулируюшие импульсы, дсйй орган, сообщают определенное колебянтяктя ОРГЯНЯ реягировяци 51 с кареткой, ОпсглируюшсГО импу;ься, зависит От скоровеличицы в прсдсляк каждого периода ко- ИКЯ КОЛЕОЯГЕЛьОГО дВИЖСця мОЖСТ ОЫТЬ имость времени регулирующего импульса от уемой величины. Пресгметом изобретениявация различнык процессовгр смой всличицы.Классический принципи его видоизменение, я тякнруемого параметра или пора, могут быть исцльзоваццэвцым принином Ползуцожесткой или гибкой обрягнагировация измеритеьнь.в оощем слу ае, огда отсция. Вмссте с те комцлск(и Силсцса известно лишь вскорости.Отличительная особсннв том, что, для обеспечениярегулируемого параметрановившсгося рекима и макспроцессов, измерителыОмук., сцосоиОй осЯватьс 5 вконтакта с измеритсльцьмствуошие ня исполнительньтсьное движение. Время коро с,ясцее аг 1 ите;ьность рсти и:1:5 ецеци 51 рсГгИрмемолсбацця. 1 заменеИем графдостипута различная зависскорости изменения рсгулир является способ автоматц:еского ретулироь зависимости от скорости цз.ецсния рсгу Гакцм 00)Язом, предстявляетс 51 Возыожпым Ос 1 Пествить неп 1)я.,Ое1ОГулированис Оез Об,)ЯтцОГО Гысгю 1 сцця обратной СБз:.1) с пе)смецннои интенсивностью регулирования и Оптимальной зависимости регулц.рующих импу,ьсов от скорости издепепия регулируемой величины,-ОБ.и с:оссо авто)ятцческого рег 1 тировяния соеспечиваетп)а,тьцыс динамические Отклонения регулируемого параме)ра от задяннОГО зпяЩНР:1 при наушецци ус ГянОВиВшеГОся рекима и мяксимальцую скорость завершения пс 1)схо )ных процессов.СЯ чертеже изображена схема применения способа к регулировапц 10 ) )ОВИ 51 Вс)хпеГО Оьфя ГидростанцииПоплавок 1 повторяет дз 1 кение уровня регулируеОго параметра) и 5 БЛ 51(Ггс 51 из.еритсл.п,м Оганом, Олзуп) 2, спосоопомзить по вертикальному 1 Тою поплавка, задается некоторое периодическое колсбцие Отцоситсл.ПО 5 улевого г 0;ожеция ня штоке; таким 00 пазом 5 бсолк)тцое движение ползна 2 Определяется сложением переносНОГО двцжени 5 0 мссИО с гОплаВком) и ОтносительноГО колсбательНОГО ДБИЖЕЦИ 51Кя)Сткя д, спосооВ скользить по всртцкалшюй направляОщей 4,следует зя движением ползуна 2 при соприкосновении с ним Одного изстержней ( илц 6 каретки. При ЗБкении кареткис цолзуцсм 2 замкаетс электрическая цепь регулирующего импульса,Цсремеццая ццтепсивпост регулирования, вследствие зависимостирегулирующих импульсов От скорости изменения регулируемого параметра, позволяет значительно умеьПить степень неравномерности регули)Овянц 51 дцяко, ВО Всех сл,115 к Бслцчцця цсрявцмерцО(ти Остетс 5кОН.чцОЙ и пОЛОжитсльпой.статиескяя характеристика регулирования )10 ке быть;)остигнутя спеНал.ньм уст;)ОйстВОм, ВОБВрящяющимкаретку Б исходно( положение. Оц 1 макет быть достигнута также заданием начального регулирующего импульса, при отсутствии изменениярсгулпруемсгс параметра цри условии, г 0 расстояние между стсржнями д и ) кярсткп сцьце удВОецно 1 мплитуды колеояте,ьцОГО;ВиксЦИОЛЗУНЯ.Ге)НодиРскос ЛБижсцце .101(ст Оыть задано не .Олзупу 2, 3 каретке , механическим приводом (срез дцффере:ццял пли фрикциоцноесцеплсние) пли элект,)Омаг 5 тым полсм, п 1 ус.1 ОВии, что каретка, учяст Б у 51 В к Ое б 1 т е;1 ) ц 0 и,1 Б и 1( с н ц 51, б ,5 е т с л едО В я т ь 3 я д Б и к е н и е м и 3 м ерителя Б момент контакта с цим.аконец, нерио иеское коле(1 атегп нос двцжепцс может бьггь здрано непосредственно регулируемому параметру ца участ:(е дсй;твия сгона измерительный орган,КОнструктивное ешение изложеноГО метода регулирования )10 кеГбыть Осуществлено различно в зависимости от конкретных условий автоматизируемого объекта.Предмет и зоб ретец ияСпособ автоматическс."о регулирования различных процессов в заВисимости От скорости изменения регулируемоЙ Величины при помощи измерительного элемента, контролирующего регулируемую величину, отли ч а ю Щ и Й с я тем, что, дя обеспечения минимального динамического Отклонения регулируемого параметра от заданного значения, при нарушении установивп егося режима и максимальной скорости завершения перехсдных процессов измерительному элементу или ведомой им контактной каретке, способной оставаться в любом положении и соз М 86099лающей За Время контакта с иаыерительным элементом реги лируюцие импульсы, действующие на исполцитсгпный орган, сообщают определенное колебательное движение,
СмотретьЗаявка
392101, 18.02.1949
Альтерман Д. З
МПК / Метки
МПК: G05D 13/58
Опубликовано: 01.01.1950
Код ссылки
<a href="https://patents.su/3-86099-sposob-avtomaticheskogo-regulirovaniya-razlichnykh-processov.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического регулирования различных процессов</a>
Способ определения оптимальной скорости резания в процессе обработки заготовки

Номер патента: 1202811
Опубликовано: 07.01.1986
Авторы: Махмудов, Остафьев, Пивко, Скицюк, Шевченко
МПК: B23Q 15/00
Метки: заготовки, оптимальной, процессе, резания, скорости
...энергии н сооггояпце с меньшим значением энер.пп, прц .-.;ом выделяется часть избыточной з).ергии. Нд первом этапе40 нзаимодейс гния это электрическая :нергия и энергия электромагнитного )злучеьпя Поэтому измерение н процессе резания ЭДС резания и потока электромагнитного излучения из зоны резания позволяет получить информацию45 , процессах, происходящих на конгзктных поверхностях инструмента и д:тали, Контактная поверхность пред.ганляет собой на микроуровне мно,.ство отдельных точек взаимодейцстния, которые являются зонами ;бмена электронами между инструменц ц-ом и деталью и очагами генериро-,дния электромагнитного излучения. Возникающая в процессе резания ЭДС носит импульсный характер, а число импульсов высокочастотной 10- :.10 кГц,...
Способ автоматического определения скорости пенообразования в процессе культивирования микроорганизмов

Номер патента: 1353811
Опубликовано: 23.11.1987
Авторы: Бярулис, Кондратавичюс, Савицкис, Станишкис
МПК: C12Q 3/00
Метки: культивирования, микроорганизмов, пенообразования, процессе, скорости
...осуществляется в ферментере 1.Система работает следующим обра зом.Когда уровень пены в ферментере 1 достигает заданного уровня, возникает контакт между пеной и электродом 2 и регулятор 3 вырабатывает им- ЗО пульсное регулирующее воздействие для исполнительного механизма 4 подачи дозы химического пеногаситепя. Начинается процесс пеногашения. Если пер - вая доза химического пеногасителя недостаточная для погашения пены до разрыва контакта пены с электродом 2, регулятор 3 вырабатывает второе импульсное регулирующее воздействие для исполнительного механизма 4 Величина дозы химического пеногасителя и интервала Д 7 между дозами определяется заранее экспериментальным путем для конкретной культуры и конкретных 20 условий культивирования....
Устройство для измерения толщины снимаемого слоя и скорости травления в процессе обработки деталей методом размерного химического травления

Номер патента: 1824461
Опубликовано: 30.06.1993
Авторы: Бабушкин, Гудинов, Иванов
Метки: методом, процессе, размерного, скорости, слоя, снимаемого, толщины, травления, химического
...и индикатор являются типовыми,Устройство работает следующим обраВыделяющийся в поверхности травления гаэ попадает в газособирвющий сосуд и постепенно заполняет его. При заполнении сосуда газом до определенного уровня сосуд перевОрачивается и выпускает газ, При этом магнит приближается к магнитоуправляемому контакту и замыкает его на короткое время. Поскольку магнитоуправляемый контакт подключает при этом источник питания ко входу генератора тактовых импульсов, то это является началом такта, Длительность тактового импульсв определяется времяэвдвющвй цепью, входящвй в задатчикдлительности такта, Значениадлительности тактового импульса в зависимости от твмп ературы раствора устанавливается либо вручную по шкале, нанесенной на панели...
Устройство для регистрации параметров технологических процессов

Номер патента: 1277157
Опубликовано: 15.12.1986
Авторы: Бадень, Кнотько, Кулаков, Москаленко, Щербина
МПК: G07C 1/10
Метки: параметров, процессов, регистрации, технологических
...начала и конца изменения параметров. После этого устройство возвращается в режим приема в регистрац входной информации, В режиме прерывания приема информации устройство работает фактически в режиме частичного анализа и обработки информации одной или нескольких информационных ячеек блока 3 памяти, Поэтому в этом режиме формируемая блоком 18 последовательность импульсов поступает на третий вход элемента ИЛИ 24 соответствующего формирователя 2, При этом триггер 25 записи данного формирователя 2 периодически изменяет свое состояние, как и при работе блока 1 фиксации начала и конца. Так как на втором входе элемента 26 И присутствует разрешающий сигнал, то перепад проходит на выход элемента 26 И и формирует сигнал считывания-записи, Из...
Устройство для передачи регулирующего импульса от автоматического или не автоматического органа управления к насаженным на рабочий вал рабочим органам гидравлической турбины

Номер патента: 34407
Опубликовано: 31.01.1934
Автор: Нагель
МПК: F03B 11/00, F03B 15/06
Метки: вал, гидравлической, импульса, насаженным, органа, органам, передачи, рабочий, рабочим, регулирующего, турбины
...оси. Для шпонки 79 предусмотрена сквозная винтовая канавка во втулке шестерни 8, Относительный поворот шестерен 7; 8 достигается путем сдвига регулирующего дополнительного валика 17 в направлении его оси, Этот сдвиг осуществляется при помощи втулки 20, связанной с не вращюащейся частью механизма управления лопатками, кото.рая включает обычный сервОмотор, действующий от центробежного регулятора, С целью разгрузки атулки 20 и прочей не вращающейся части механизма управления от нагрузок, воспринимаемых зуб.;цами шестерен 7, 8 при определенном, установившемся режиме работы турбины, в продолжение которого к лопаткам не передается регулирующего импульса,скользящая шпонка 19 выполнена самотормозящей путем расположения ее подуглом к...
Предыдущий патент: Паровозная букса
Следующий патент: Способ сохранения битой птицы
Случайный патент: Тяговый орган скребкового конвейера