Устройство для автоматического выбора направления перемещения объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 506003
Авторы: Биберштейн, Мялковский, Терлецкий



Текст
Союз Советских Социалистических Республик(51) М. Кл.2 С 05 Р 3/00 с пр единением заявки(23) ПриоритетОпубликовано 05,03.76. БюллетеньДата опубликования описания 06.05.7 осударственнын комитет авета Министров СССР 0(088.8 3) УД по делам изобретении н открытий(71) Заявитель спериментально-конструкторскии и технологическии инсти автомобильной промышленности(54) УСТРОВЫБОРА НАПР ВО ДЛЯ АВТОМАТИЧЕСКОГОЕНИЯ ПЕРЕМЕЩЕНИЯ ОБЪЕК Изобретение относится к технике автоматического управления, может быть использовано в позиционных системах программного управления для транспортирования объекта управления в определенной последовательности от одной рабочей позиции на технологической линии к другой.Известны устройства для автоматического выбора направления перемещения объекта, содержащие две группы последовательно соединенных и схем разделения, переключатель с и контактами, два формирователя сигналов перемещения и и датчиков местонахождения объекта.Цель изобретения - повышение надежности устройства.Предлагаемое устройство отличается тем, что в него введено 2 и резисторов, каждый из которых подсоединен ко входу схем разделения, причем каждый контакт переключателя через цепочку из параллельно соединенных резистора и схемы разделения первой группы и резистора и схемы разделения второй группы подсоединен ко входу датчика местонахождения, а каждая из групп схем разделения подсоединена ко входу формирователя сигналов перемещения,На чертеже представлена принципиальная схема устройства. Переключатель пунктов следования 1 с контактами через резисторы 3 соединяется со входами двух схем разделения 4, образующих две группы последовательно соединенных и схем разделения 5 и 6. Выходы схем разделения обеих групп попарно подключены к соответствующим датчикам местонахождения объекта 7 - 10, у которых различают два рабочих состояния. Нормальное состояние датчика - это закрытый выходной транзистор 11, При воздействии объекта на датчик транзистор 11 открывается, Выход каждой из групп схем разделения 5 и 6 подключен ко входу соответствующего формирователя сигналов направления перемещения Вперед и Назад 12, 13.Устройство работает следующим образом, Предположим, что подвижный объект находится на рабочей позиции в начале линии и воздействует на датчик 7. Переключатель пунктов следования 1 находится в положении, которое соответствует вызову объекта на рабочую позицию в конце линии, т. е. на датчик 10, В этом случае командный сигнал отрицательной полярности через резисторы 3, служащие для преобразования токового сигнала в потенциальный, поступает от переключателя пунктов следования 1 на входы двух схем разделения 4 обеих групп схем разделения 5, 6,а затем с выхода группы 6 - на вход формирователя 13. На вход формирователя 12 сигнал не поступает, так как в данном случае выход группы 5 зашунтирован открытым транзистором 11 датчика местонахождения 7. Наличие командного сигнала на входе формирователя 13 и отсутствие сигнала Вперед является необходимым и достаточным условием для появления на выходе формирователя 13 сигнала Назад,Объект, съезжая с позиции, на которой он находился, и двигаясь Назад, перестает воздействовать на датчик 7, вследствие чего выходной транзистор 11 последнего закрывается. Теперь командный сигнал поступает и на вход формирователя 12, но, так как на выходе формирователя 13 есть сигнал Назад, который одновременно является запрещающим сигналом для формирователя 12, сигнал Вперед не появляется.При приходе объекта на запрограммированную позицию, которой соответствует датчик 10, выходной транзистор 11 последнего открывается. Командный сигнал от переключателя пунктов следования 1 продолжает поступать на обе группы схем разделения, но, так как их выходы зашунтированы открытым транзистором 11, на входы формирователей 12 и 13 сигнал не поступает, Движение объекта прекращается.При движении объекта в направленииВперед от датчика с большим порядковым 5 номером к датчику с меньшим порядковымномером работа схемы аналогична, только в этом случае на выходе формирователя 12 оказывается сигнал Вперед. 10 Формула изобретенияУстройство для автоматического выбора направления перемещения объекта, содержащее две группы последовательно соединенных и 15 схем разделения, переключатель с и контактами, два формирователя сигналов перемещения и и датчиков местонахождения объекта, отличающееся тем, что, с целью повышения его надежности, в него введено 2 а 20 резисторов, каждый из которых подсоединенко входу схем разделения, причем каждый контакт переключателя через цепочку из параллельно соединенных резистора и схемы разделения первой группы и резистора и схе мы разделения второй группы подсоединен ковходу датчика местонахождения, а каждая из групп схем разделения подсоединена ко входу формирователя сигналов перемещения,506003 Составитель М. ТерлецкийТехред М, Семенов Редактор Б, Полещук Корректор А, Галахова Типография, пр. Сапунова, 2 Заказ 933/9 Изд. Ма 286 Тираж 1029 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5
СмотретьЗаявка
1879940, 23.01.1973
ЭКСПЕРИМЕНТАЛЬНО-КОНСТРУКТОРСКИЙ И ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ АВТОМОБИЛЬНОЙ ПРОМЫШЛЕННОСТИ
ТЕРЛЕЦКИЙ МИХАИЛ НИКОЛАЕВИЧ, МЯЛКОВСКИЙ ЭДУАРД НИКОЛАЕВИЧ, БИБЕРШТЕЙН АРОН МАТВЕЕВИЧ
МПК / Метки
МПК: G05D 3/00
Метки: выбора, направления, объекта, перемещения
Опубликовано: 05.03.1976
Код ссылки
<a href="https://patents.su/3-506003-ustrojjstvo-dlya-avtomaticheskogo-vybora-napravleniya-peremeshheniya-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для автоматического выбора направления перемещения объекта</a>
Устройство для воспроизведения частотно-модулированных сигналов

Номер патента: 1075301
Опубликовано: 23.02.1984
Автор: Кот
МПК: G11B 5/04
Метки: воспроизведения, сигналов, частотно-модулированных
...вычитающий счетчик 13,суммирующий счетчик 14 и фильтр 15 5 нижних частот, остальные информационные каналы 4 содержат, в каждомиз них, последовательно соединенные формирователь 16 импульсов, триггер 17 и фильтр 18 нижних частот, 10 включенные между входной и выходнойинформационными шинами 1 и 2, последовательно соединенные управляемый генератор 19 и делитель 20частоты, включенные между выходомтриггера 17 и его вторым входом,при этом выход фильтра 15 первогоинформационного канала 3 соединенс вторыми входами управляемых генераторов 19 остальных информационныхканалов 4; кроме того, предлагае мое устройство содержит в первоминформационном канале 3 последовательно соединенные первый делитель21 частоты, третий элемент И 22,второй...
Цифровой фазометр

Номер патента: 989487
Опубликовано: 15.01.1983
Авторы: Глумов, Майко, Ярославцев
МПК: G01R 25/00
...первый логический элемент ИЛИ 6, логический элемент ИЛИНЕ 7, соединенный с четвертым ключом 8 и пятым ключом 9, третий ключ10, запираемый при равенстве единицесодержимого реверсивного счетчика 11;второй и третий логические элементыИЛИ 12 и 13, соответственно подклю-ченные к вычитающему и суммирующемувходам реверсивного счетчика 11; делитель-счетчик 14 на М; делительсчетчик 15 с переменным коэффициен" .том деления, равным содержимому реверсивного счетчикапри нулевом содержимом его коэффициент деления равен й); экстраполятор 1 б, входы которого подключены к выходам делителей14 и 15, а выходы через ключи 8 и 9подключены к входам элементов ИЛИ 12и 13,. Фазометр работает следующим образом.При наличии входныхподлежащих измерению )...
Асинхронный электропривод

Номер патента: 1697252
Опубликовано: 07.12.1991
Автор: Олещук
МПК: H02P 7/42
Метки: асинхронный, электропривод
...питающем напряжении на входе преобразователя (выпрямителя 1), пропорционально которому вырабатывается амплитуда сигнала на выходе датчика 52, амплитуда напряжения О 50 на выходе делителя 50 саответствоваО 1 змаксЛа ВцражЕНИЮ О 5 а = , Гдв О 1 Змакс - . максимальная амплитуда развертывающего напряжения генератора 13, наблюдаемая на начальной выходной частоте; Й - кратность диапазона связанного регулирования частоты и напряжения преобразователя частоты системы электрапривода, При увеличении ,напряжения относительно минимального значения амплитуда результирующего опорного сигнала О 5 а пропорционально уменьшается, что позволяет в случае изменения питающего напряжения обеспечить постоянство вольт-секундной площади палуволны выходного...
Устройство для магнитной записи речевых сигналов

Номер патента: 614462
Опубликовано: 05.07.1978
Авторы: Виткаускас, Петрулис, Тарнопольский, Толочка
МПК: G11B 15/02
Метки: записи, магнитной, речевых, сигналов
...устройстУстройство содержит магнитную головку 1,усилитель 2 записи, первый выход которогосоединен с магнитной головкой, схему И 3,фоРмиРователь 4 огибаюаеВ речевого сигнала,вход которого подключен ко второму выходуусилителя 2 записи, а выход - к первому входу схемы И 3, выход которой через блок 5управления подключен к лентопротяжному механизму 6,15 Формирователь 4 содержит диод 7, резис.торы 8; конденсаторы 9, усилитель,10 и компаратор 11. Входы усилителя 2 подключены к ис.точникам 12 сигналов. Устройство снабжено динениыми пиковым дет,Жрующей цепью 14, ко щим мультивибратором подключен ко второму в пнси, Выход живущего му614462 Этор 3 выполнен иа диоде 17, резисторе 8н конденсаторе 9.Устройство работает следующим...
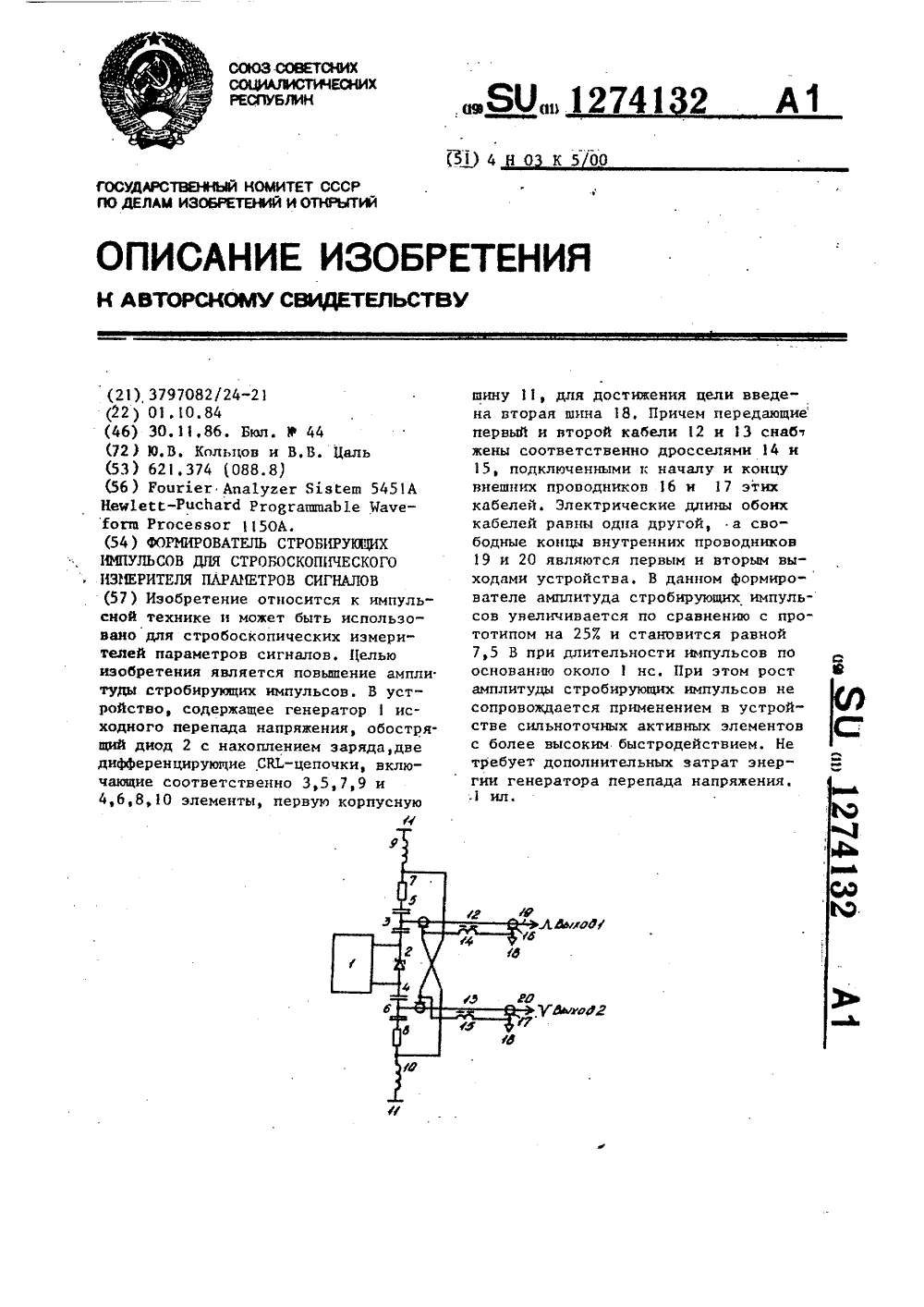
Формирователь стробирующих импульсов для стробоскопического измерителя параметров сигналов
Номер патента: 1274132
Опубликовано: 30.11.1986
МПК: H03K 5/007
Метки: измерителя, импульсов, параметров, сигналов, стробирующих, стробоскопического, формирователь
...последнего обостряется до необходимой величины диодом 2, причем на его аноде формируется отрицательный перепад напря ,жения, а на катоде - положительный. ;Далее перепады дифференцируются;положительный - СКЬ-цепочкой - конденсатор 3 - резистор 7 - индуктивный элемент 9;отрицательный - СКЬ-цепочкой-конденсатор 4 - резистор 8 - индук тивный элемент 10, В результате дифференцирования перепада часть напряжения падает на индуктивные элементы 9 и 10. Внешние проводники 16 и 17 кабелей 12 и 13 в точках подключения кабелей к конденсаторам 3, 5 и 4, 6 соединены с общими точками резистора 8 и элемента 10 и резистора 7 и элемента 9. Поэтому на внешних проводниках 16 и 17 кабелей 12 и 13 создается падение напряжения, равное падению напряжения на...