Способ настройки исходного положения электрогидравлического следящего привода с числовым программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
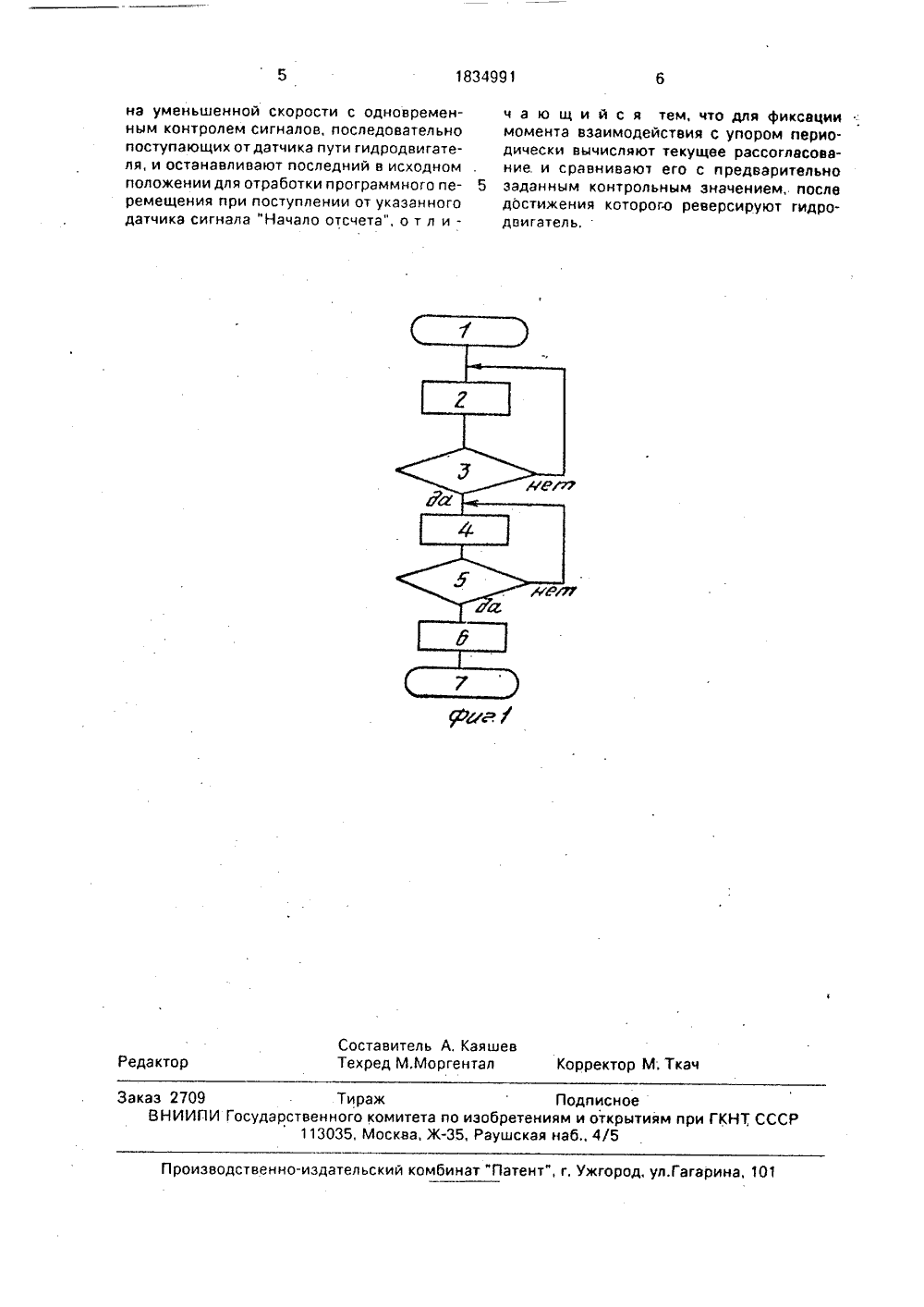
(9 ТЕНТНОЕ ГОСУДАРСТВЕННО ВЕДОМСТВО ССС (ГОСПАТЕНТ СССР ПИСАНПАТЕНТУ(21) 5029392/29 (22) 25.02.92 (46) 15.08,93, Б,юл, Ю 30 (71) Акционерное общество "Станкостроительный завод им.Ленина" (72) А,И,Каяшев, В,А,Романчук и О.Н,Космынинэ (73) Акционерное общество "Станкостроительный завод им,Ленина" (56) Сасонкин В,Л. Прогрение станками. М., Машин 1, с.403 фиг.68, (54) СПОСОБ НАСТРОЙКИ ИСХОДНОГО ПОЛОЖЕНИЯ ЭЛЕКТРОГИДРАВЛ ИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ 57) Использование: в устройствах управления рабочими органами станко 5)5 Е 15 В 9/03, В 23 0 5/О л енных роботов, испытательных стендов илетательных аппаратов, Сущность; включением оператора 2 перемещают шток 15 с заданной скоростью и периодически вычисляют текущее рассогласование, которое, сравнивается оператором 3 с контрольным значением, после достижения которого (что соответствует наезду поршня 23 на упор) оператор 4 обеспечивает реверс штока 15 . гидродвигателя 16 и перемещения его на уменьшенной скорости, Одновременно оператором 5 осуществляется контроль сигналов датчика 14, 8 момент поступления сигнала "начало отсчета" управление передается оператору 6 и шток 15 с ханом 18 останавливается в исходном положении для отработки программного перемещеИзобретение относится к гидроавтомэтике и может быть использовано в устройствах управления рабочими органамистанков, промышленных роботов, испытательных стендов и летательных аппаратов, 5Изобретение предназначено для получения технического результата, заключающегося в том, что повышается точность ибыстродействие в процессе достижения исходного положения гидродвигателя; 10Причинно-следственная связь междудостигаемым техническим результатом исовокупностью признаков заключается в том,что для реализации предложенного способаиспользуется минимальное количество измерительной аппаратуры и отработка реверса осуществляется без выполненияпромежуточных операций, способствующихнакоплению ошибки,На фиг,1 изображена логическая схема 20алгоритма предложенного способа; нафиг,2 - конструктивная схема электрогидравлического следящего привода с числовым программным управлением (напримере использования в конструкции хонинговального станка) для использованияданного способа.Схема алгоритма (фиг.1) имеет оператор1 "начало алгоритма", оператор 2 включенияна перемещение в направлении упора, оператор 3 условного перехода, оператор 4 реверса, оператор 5 условия поступлениясигнала "начало отсчета", оператор б останова и оператор б останова и оператор 7"конец алгоритма". 35Схема электрогидравлического следящего привода (фиг,2) содержит насос 8, распределительный золотник 9, шаговыйэлектродвигатель (ШД) 10, связанный винтовой передачей 11 с золотником 9, блок 12 40управления шаговым электродвигателем(БУШД), устройство 13 числового программного управления (УЧПУ), реализующее алгоритм фиг.1, импульсный датчик 14 путиподвижного элемента - штока 15 гидродвигэтеля 16. Датчик 14 связан со штоком 15реечной передачей 17, а шток 15 - с режущим инструментом - хоном 18 и с дополнительным электродвигателем 19 вращенияхона 18. К насосу 8 подключены манометр 5020, клапан 21 и бак 22, шток 15 имеет.поршень 23, Выход "ДА" оператора 3 соединенс входом оператора 4, а его выход "НЕТ" - свходом оператора 2, выход "ДА" оператора5 соединен с входом оператора б, а его выход "НЕТ" - со входом оператора 4.Способ реализуется следующим образом,Рабочая жидкость от насоса 8 поступаетк золотнику 9 под давлением, настроенным с помощью клапана 21 по показаниям манометра 20. Положение золотника 9 задается с помощью шагового электродвигателя 10, От золотника 9 рабочая жидкость подается в одну из полостей гидродвигателя 16 и шток 15 перемещает хон 18 вверх или вниз. Скорость этого перемещения определяется обьемом жидкости, поступающей в гидро- двигатель 16, Скорость и путь штока 15 контролируется датчиком 14, от которого поступают посл едовэтел ь но сигнал ы (импульсы) в УЧПУ 13, Количество импульсов пропорционально величине, а их частота следования - скорости перемещения штока 15, который включением оператора 2 перемещают с заданной скоростью в направлении упора (не обозначен). В УЧПУ 13 периодически вычисляют текущее рассогласование (Втек) и, с помощью оператора 3, сравнивают его с предварительно заданным контрольным значением (Взад). До достижения заданного значения, т.е. при ВтеккВэдд, оператор 3 через выход "НЕТ" продолжает отработку оператора 2, а после достижения заданного значения, т,е. при Втек Взад (что соответствует наезду поршня 23 на упор), оператор 4 обеспечивает реверс штока 15 гидродвигателя 16 и перемещение его на уменьшенной скорости с одновременным контролем оператором 5 сигналов последовательно поступающих от датчика 14, В момент поступления от датчика 14 сигнала "начало отсчета" управление передается оператору б и шток 15 с ханом 18 останавливается в исходное положение для отработки программного перемещения, т.е, для выполнения операции резания.Таким образом, выход в исходное положение осуществлен в течение первого же оборота датчика 14 без накопленияошибки в предыдущих циклах,Использование данного изобретения позволит повысить быстродействие и точность работы устройств управления рабочими органами станков, промышленных роботов, испытательных стендов и летательных аппаратов,В настоящее время проведены испытания с использованием вышеизложенного способа с положительными результатами.Формула изобретения Способ настройки исходного положения электрогидраслического следящего привода с числовым программным управлением, при котором подвижный элемент гидродвигателя перемещают с заданной скоростью в направлении упора, фиксируют момент взаимодействия с упором и реверсируют гидродвигатель, после чего подвижный элемент гидродвигателя перемещают183499 1 Составитель А. КаяшевТехред М,Моргентал Корректор М; Ткач Редактор Заказ 2709 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ, СССР 113035, Москва, Ж, Раушская наб 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 на уменьшенной скорости с одновременным контролем сигналов, последовательно поступающих от датчика пути гидродвигателя, и останавливают последний в исходном положении для отработки программного пе ремещения при поступлении от укаэанного датчика сигнала "Начало отсчета", о т л ич а ю щ и й с я тем, что для фиксации момента взаимодействия с упором периодически вычисляют текущее рассогласование и сравнивают его с предварительно задан н ы м контрольным значением,. после достижения которого реверсируют гидро- двигатель,
СмотретьЗаявка
5029392, 25.02.1992
АКЦИОНЕРНОЕ ОБЩЕСТВО "СТАНКОСТРОИТЕЛЬНЫЙ ЗАВОД ИМ. ЛЕНИНА"
КАЯШЕВ АЛЕКСАНДР ИГНАТЬЕВИЧ, РОМАНЧУК ВЛАДИМИР АНТОНОВИЧ, КОСМЫНИНА ОЛЬГА НИКОЛАЕВНА
МПК / Метки
Метки: исходного, настройки, положения, привода, программным, следящего, управлением, числовым, электрогидравлического
Опубликовано: 15.08.1993
Код ссылки
<a href="https://patents.su/3-1834991-sposob-nastrojjki-iskhodnogo-polozheniya-ehlektrogidravlicheskogo-sledyashhego-privoda-s-chislovym-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ настройки исходного положения электрогидравлического следящего привода с числовым программным управлением</a>
Датчик перемещий полированного штока

Номер патента: 659730
Опубликовано: 30.04.1979
Авторы: Ахраров, Бисерова, Ждановских, Зайнутдинова, Хоботнев
МПК: E21B 47/00
Метки: датчик, перемещий, полированного, штока
...зубчатой передачи 9.Устройство работает следуюцтим образом.Перед началом измерений фрикционносколесо 1 вводится в зацепление с полированным штоком 2 при помощи прижимного устройства. Возвратно-поступательноеперемещение полированного штока 2 преобразуется во вращательное движениефрикционного колеса 1, которое в свою очередь приводит во вращательное движениеферромагнитные стержни 5 вокруг оси 3.Это вращательное движение преобразуетсяпосредством зубчатой передачи 9 во вращательное движение ферромагнитныхстержней 5 вокруг своей оси.Итак, каждый ферромагнитный стержень5 участвует в двух движениях: вращаетсявокруг ферромагнитной оси 3 и одновременно вращается вокруг собственной оси.При подаче напряжения в обмотки возбукдения в них...
Датчик давления с частотным выходом

Номер патента: 473072
Опубликовано: 05.06.1975
Авторы: Белов, Волохов, Горенштейн, Камальдинова, Корольков, Маркин, Павлов, Петров, Толстоусов, Филатова
МПК: G01L 11/00, G08C 19/16
Метки: выходом, давления, датчик, частотным
...датчик, разрез;Датчик включает основание 1, на которомзакреплен цилиндрический резонатор 2, вы)юлненный из токопроводящсго материала и закрытыЙ заглушкои 8, В которои закреплен штуцер 4, предназначенный для вакуумирован;1 я внутренней полости резонатора 2, В последней разме 1 цен постоянный магнит 5, выполнвнный в виде четырехполюсн"ка, прострачство между полюсами которого заполнено пзолиру 1 ощим материалом 6, на поверхности размещены электроды смкостной системы съема.Магнитные полюсы магнита 5 и, электроды 7 ооразуют цилиндрпчсскую поверхность, концентрпчную внутренней поверхности резонатора 2. Соединительные провода 8 от элсктродов 7 и заглушки 8 выводятся к прпсосдцнительным,клеммам 9 через Отверст",1 с 10 в ;1 остоянном...
Датчик ускорения с частотным выходом

Номер патента: 871076
Опубликовано: 07.10.1981
Авторы: Воронин, Зайцев, Чернятин, Эткин
МПК: G01P 15/097
Метки: выходом, датчик, ускорения, частотным
...датчика.Цель достигается тем, что резонатор образован инерционной массой и элементами упругого подвеса, при этом инерционная масса расположена между адаптером и возбудителем, а элементы упругого подвеса расположены в плоскости, перпендикулярной оси чувствительности датчика.На чертеже приведена структурная схема датчика ускорения с частотным выходом.Датчик ускорения с частотным выходом содержит основание 1, которое жег стко связано с корпусом 2, резонатор, включающий инерционную массу 3 и упругие подвесы 4, адаптер 5, усилитель б,выход которого соединен с адаптером 5, возбудитель 7 колебаний, который соединен с первым ныходом усилителя б и кожух 8,Второй выход усилителя б является электрическим выходом устройства. Датчик ускорения с...
Частотный датчик с дискретным выходом

Номер патента: 1039016
Опубликовано: 30.08.1983
Авторы: Баржин, Колпаков, Милькевич, Сычев
МПК: H03B 25/00
Метки: выходом, датчик, дискретным, частотный
...рования радиоимпульсных последовательностей автогенераторами 1 и 2,в результате пропадает сигнал навыходе фильтра 5 нижних частот,частота которого, как было указано 5 выше, равна частоте следования радиоимпульсоь, При этом напряжениена выходе амплитудного детектора 7,а значит и на входе триггера со счетным входом претерпевает отрицатель"ный скачок и триггер 8 опрокидывается. Это, в свою очередь, приводит кскачкообразному изменению потенциала на выходе триггера 8, и соответственно, на управляющем входе автогенератора 2. Собственная частотаколебаний ы 2 последнего изменяется,условие асинхронности колебаний счастотами сои ч 2 восстанавливаетсяи датчик вновь переходит в режимгенерирования двух радиоимпульсныхпоследовательностейТаким...
Система управления пилотажного стенда консольного типа

Номер патента: 1774369
Опубликовано: 07.11.1992
Авторы: Липатников, Синицына, Шибаев
МПК: G09B 9/08
Метки: консольного, пилотажного, стенда, типа
...основания, гидроцилиндры 6 и 2 управляются от собственных Э ГУ 1 7, и Э ГУ 11 8, соответственно, основание стенда 9. Гидроцилиндры 6 снабжены датчиками 10 перемещения штока гидроцилиндра б и датчиками 11, определяющими усилие на его штоке, Сигналы датчиков подаются на входы соответствующих блоков преобразовательной и усилительной аппаратуры БПУА 1 12 и БПУА 11 13, сигнал с выхода БПУА 1 подается на первый вход усилителя-сумглатора 14, выход которого соединен с входом усилителя-инвертора 15, выход которого соединен с первым входом ЭГУ 1, выход БПУА 1 соединен с вторым входом усилителя-сумматора 14, гидроцилиндры 2 также снабжены датчиками 16 перемещения штока гидроцилиндра 2, датчиками 17, определяющими, усилие на его штоке,...
Предыдущий патент: Волновой обменник давления
Следующий патент: Способ переключения скорости электрогидравлического следящего привода при касании рабочим органом объекта воздействия
Случайный патент: Устройство для замораживания биоматериалов