Способ определения углового положения объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
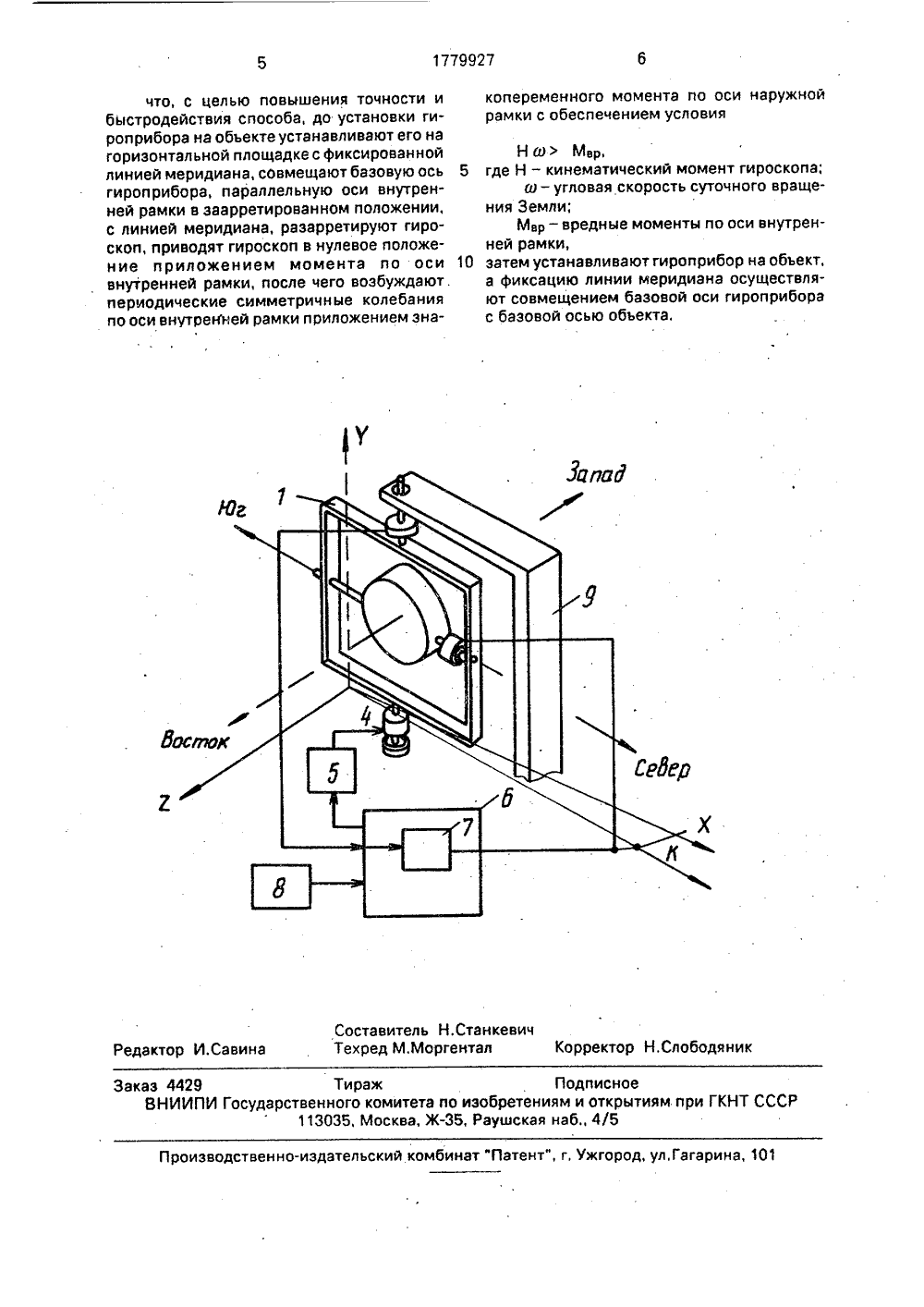
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК 5 6 01 С 19/38 Я/ Е Е ется повышевия определеия объекта ГОСУДАРСТВЕННОЕ ПАТЕНТНВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗО АВТОРСКОМУ СВИДЕТЕЛЬСТ(54) СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГОПОЛОЖЕНИЯ ОБЪЕКТА(57) Изобретение относится к приборостроению и может быть использовано при определении углового положения объектаотносительно меридиана испытательных ивибрационных стендов, поворотных столови других объектов, находящихся в закрытых Изобретение относится к приборостроению, а именно к технике контроля и испытаний аппаратуры, и может быть использовано при определении углового положения объекта относительно меридиана испытательных и вибрационных стендов, поворотных столов и других объектов, находящихся в закрытых помещениях.Известен способ определения углового положения обьекта относительно меридиана гироприбором с трехстепенным гироскопом в кардановом подвесе, включающий установку гироприбора на объекте осью наружной рамы вертикально, фиксацию линий меридиана и определение углового положения объекта относительно меридиана по углу поворота наружной рамы гироскопа относительно объекта (1).Недостатком этого способа является относительно ни, кая точность, вызванная напомещениях, Цель изобретения - повышение точности и быстродействия определения углового положения объекта относительно меридиана. Предварительная установка.трехстепенного гироскопа на горизонтальной площадке с фиксированной линией меридиана и ориентация его осей относительно линии меридиана позволяет после переноса гироскопа на объект определить угловое положение объекта эа минимальное время, а возбуждение периодических симметричных колебаний по осивнутренней рамки приложением знакопеременного молота по оси наружной рамки позволяет свести к минимуму возмущающие моменты по оси внутренней рамки гироскопа. 1 ил,личием моментов трения по оси внутренней рамки гироскопа, и недостаточное быстродействие из-эа необходимости определения направления меридиана непосредственно на объекте,Целью изобретения являние точности и быстродейстний углового положенотносительно меридианаУкаэанная цель достигается тем, что в способе определения углового положения обьекта относительно меридиана гироприом с трехстепенным гироскопом в кардановом подвесе, включающем установку гироприбора на объекте осью наружной рамы вертикально, фиксацию линии меридиана и определение углового положения объекта относительно меридиана по углу поворота наружной рамы гироскопа относительно объекта, до установки гироприборана объекте устанавливают его на горизонтальной площадке с фиксированной линией меридиана, совмещают базовую ось гироприбора, параллельную оси внутренней рамки в заарретированном положении, с 5 линией меридиана, разарретируют гироскоп, приводят гироскоп в нулевое положение приложением момента по оси внутренней рамки приложением знакопеременного момента по оси наружной рамки 10 с обеспечением условия:НиМвр,где Н - кинематический момент гироскопа; 15в- угловая скорость суточного вращения Земли;Мр - вредные моменты по оси внутренней рамки,затем устанавливают гироприбор на объект, 20 а фиксацию линии меридиана осуществляют совмещением базовой оси гироприбора с базовой осью объекта.На чертеже изображена система для осуществления способа, где 251 - гироприбор на двухколечных шарикоподшипниковых опорах (ГП), например указатель направления;2 - линейный датчик угла ЩУ);3 и 4 - датчики момента ЩМ) соответст венно по внутренней и наружной осям ГП 1;5 - устройство для задержки колебаний УЗК), в частном случае трехколечные вращающиеся опоры по внутренней оси;б - блок управления (БУ); 357 - измерительный прибор (ИП), по которому измеряют сигнал с ДУ 2;8 - источник питания ИПт):9 - основание или объект, на котором установлен ГП 1, 40Способ осуществляют следующим образом.Перед определением углового положения объекта ГП, например, указатель направления устанавливают при 45 необходимости в кронштейн, при этом базовая плоскость кронштейна должна совпадать или быть параллельна внутренней оси ГП 1 (в нулевом его. положении).50Далее ГП 1 устанавливают на предварительно проведенную на полу помещения линию меридиана, совмещают с ней базовую плоскость кронштейна или ГП и тем самым устанавливают внутреннюю ось ГП в нуле вом положении в плоскость меридиана или параллельную ему. Возможна также ориентация внутренней оси ГП перпендикулярно направлению меридиана, С блокаБУ 6 подают напряжение питания на систему, разарретируют ГП 1 (при наличии арретирующио устройства) и с помощью датчика ДМ 3 приводят гироскоп к нулевому положению, определяемому по ДУ 2 (при наличии в ГП 1 точного арретирующего устройства эту операцию не проводят, т.к, в момент разарретирования ГП 1 оказывается совмещенным с одной из осей объекта и, следовательно, с линией меридиана или с линией, перпендикулярной ему). Далее с помощью устройства УЗК 5 и ДМ 4 сообщают опорам по внутренней оси принудительные периодические колебания путем подачи на датчик ДМ 4 знакопеременного напряжения в форме меандра для обеспечения условия Н и Мвр. Это условие обеспечивает благодаря тому, что при колебаниях осредняется момент сил трения в опорах по внутренней оси и в этом случае гироскоп обладает видимым движением относительно Земли(в противном случае при не выполнении этого условия гироскоп может быть "захвачен" силами трения и не будет обладать видимым движением, а предлагаемый способ не будет обеспечивать положительного эффекта).Далее ГП 1 устанавливают на объект 9 и совмещают базовую плоскость ГП 1 с одной из горизонтальной осей объекта и сигнал с датчика ДУ 2 поступает на прибор ИП.7, установленный, например, в БУб, по которому и фиксируют угловое положение обьекта при известной крутизне характеристики ДУ 2. Это угловое положение учитывают при определении точности ГП по известным формулам,По сравнению с прототипом предлагаемый способ позволяет расширить область его применения и уменьшить время на подготовку испытаний, т.к. способ позволяет определить любое положение объекта относительно меридиана, без выставки его в этом направлении, в любом закрытом помещении (цехе лаборатории, термокамере), причем в рассматриваемом способе прибор используют как средство передачи меридиана как в данном, так и в смежном помещениях,Формула изобретения Способ определения углового положения объекта относительно меридиана гироприбором с трехстепенным гироскопом в кардановом подвесе, включающий установку гироприбора на объекте осью наружной рамы вертикально, фиксацию линии меридиана и определение углового положения объекта относительно меридиана по углу поворота наружной рамы гироскопа относительно объекта, о т л и ч а ю щ и й с я тем,1779927 Составитель Н.СтанкевТехред М,Моргентал Редактор И.Савин орректор Н,Слободяник Заказ 4429 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям. при ГКНТ СС 113035, Москва, Ж, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул,Гагарина, 101 что, с целью повышения точности и быстродействия способа, до установки гироприбора на объекте устанавливают его на горизонтальной площадке с фиксированной линией меридиана, совмещают базовую ось 5 гироприбора, параллельную оси внутренней рамки в заарретированном положении, с линией меридиана, разарретируют гироскоп, приводят гироскоп в нулевое положение приложением момента по оси 10 внутренней рамки, после чего возбуждают. периодические симметричные колебания по оси внутренней рамки приложением знакопеременного момента по оси наружнойрамки с обеспечением условия На Мр,где Н - кинематический момент гироскопа;ш - угловая скорость суточного вращения Земли;Мвр - вредные моменты по оси внутренней рамки,затем устанавливают гироприбор на объект, а фиксацию линии меридиана осуществляют совмещением базовой оси гироприбора с базовой осью объекта.
СмотретьЗаявка
4817726, 29.01.1990
ЛЕНИНГРАДСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ГРАНИТ"
ПОЗДНЯКОВ ВЛАДИМИР ГЕОРГИЕВИЧ, СТАРШИНОВ АЛЕКСЕЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: G01C 19/38
Метки: объекта, положения, углового
Опубликовано: 07.12.1992
Код ссылки
<a href="https://patents.su/3-1779927-sposob-opredeleniya-uglovogo-polozheniya-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения углового положения объекта</a>
Способ фрезерования внутренних контуров с угловыми переходами

Номер патента: 307853
Опубликовано: 01.01.1971
Авторы: Бондаренко, Руднев
МПК: B23C 3/00
Метки: внутренних, контуров, переходами, угловыми, фрезерования
...фрезерованием с изменением величины подачи при обходе по контуру.Предложенный способ предусматривает повышение точности обработки внутренних контуров, С этой целью рабочую подачу (стола- станка) производят импульсами с заданной величиной перемещения и временем остановки, в связи с чем уменьшается прогиб фрезы, влияющий на точность обработки переходного участка. Предложенный способ фрезерования внутренних контуров концевыми фрезами на вертикально-фрезерных станках с программным управлением, заключается в том, что при подходе фрезы к угловому переходу осуществляется импульсная (прерывистая) рабочая подача стола за счет какого-либо известного вмонтированного В станок с 1 ециального устройства. Замедление скорости перемещения стола...
Устройство для измерения длины средней оси объекта

Номер патента: 702545
Опубликовано: 05.12.1979
Авторы: Абакумов, Вихман, Гайнуллина
МПК: H04N 7/18
Метки: длины, объекта, оси, средней
...из видеосигнала выделяются импульсы длины хорды в каждой строке.2 О Импульсы длин хорд поступаот на блоксравнения смежных строк 5, на выходе которого формируются импульсы, длительность которых пропорциональна разности начал702545 Формула изобретения ель А. Паноуговая Составит Техред О. Л Тираж 775 Н И И П И Государствен по делам изобрете 035, Москва, Ж - 35,ал П П П Патентз, г.Редактор Б. ФедотовЗаказ 7611/55 Корректор МПодписноемитета СССРоткрытийкая наб д. 4/5ул Проектная ожо ного к ний и Раушс Ужгород 1 фнли концов смежных хорд (в смежных строках). Эти импульсы разности поступают на элемент И 3, на другой вход которого поступают импульсы с генератора маркерных импульсов 4.В результате на выходе элемента И 3 формируется серия...
Способ фрезерования внутренних контуров с угловыми переходами

Номер патента: 878440
Опубликовано: 07.11.1981
Авторы: Беговшиц, Леваков, Лопуцько, Татарченко
МПК: B23C 3/00
Метки: внутренних, контуров, переходами, угловыми, фрезерования
...Онисываемы"обработоои за синструмента ибо пки. отке мена станУказанньсокой точноного затуплтанова, Кродачи .имеетдетали, конфрезой, В рпрои ф,резврматериаловмента. ги спо со сти обра ения,инс ме того, место уп так пнрую езультате овании тнаблюда б не ооеспечивает выботки из-за интенсивтрумвнта во время оспри прекращении порочнение поверхности щей с вращающейсяэтого в особенности руднаобрабатывавмыхется поломка инструЦель ти обрабоС этои после ка осущвств обработок правлени повышение точносзобретениятки.целью вждого имлуяют отводв направлю,ра,бочей и писываемом способе ьса рабочей подачи инструмента из зоны енин, обратном надавии. Способ фрезерован ров с угловыми пвр307853, о т л и ч а целью повышенияия внутренних, контуеходами по авт....
Рейка для определения положения оси объекта относительно референтной плоскости

Номер патента: 1767334
Опубликовано: 07.10.1992
Авторы: Кирнарская, Ранов
МПК: G01C 15/06
Метки: объекта, оси, относительно, плоскости, положения, рейка, референтной
...в виде жесткой полосы, соединенной с корпусом через введенную пружину сжатия и установленной с возможностью взаимодействия с криволинейной пластиной через введенный фигурный рычаг с направляющим элементом,жестко скрепленным с корпусом, причем расстояние г от оси поворота до криволинейной пластины опредепено соотношением где й - расстояние от оси поворота до точки соединения криволинейной пластины со штангой;а - угол между осью корпуса и осью штанги;- расстояние от оси поворота до пяты с учетом расстояния от оси обьекта до его поверхности,Таким образом заявленное техническое решение соответствует критериям новизны. Анализ известных технических решений аналогов) в исследуемой области позволяет сделать вывод об отсутствии в них...
Устройство для контроля параллельности осей объектов

Номер патента: 1693374
Опубликовано: 23.11.1991
МПК: G01B 11/26
Метки: объектов, осей, параллельности
...под углом 45 к оси контрольного элемента, На контролируемый элемент на симметричных базовых точках устанавливают зонную пластину 6 (ось симметрии зон совпадает с центром базовой точки) с отражающими зеркалами 4 и 5 и пентапризму 8, причем отражающие зеркала 4 и 5 перекрывают только верхнюю часть эонной пластины 6. Плоскость эонной пластины 6 также устанавливается под углом 450 к оси контролируемого элемента, Регистрирующий блок 9 устанавливается в конечной точке.При выполнении геометричесКого условия расположения элементов, т.е. контрольный и контролируемый элементы не имеют взаимного разворота и номинальный размер между ними соблюдается, луч проходит через коллимирующую оптику 2 и попадает на полупрозрачный кубик 3, где одна...
Предыдущий патент: Шаровой трехстепенный электростатический подвес
Следующий патент: Маятниковый гирокомпас
Случайный патент: Устройство для измерения объекта