Устройство для градуировки измерителей параметров движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1483383
Автор: Иванов



Текст
ОЮЗ СОВЕТСКИХ ОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК А 1 80148338 Ш 4 а 01 Р 21 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР щг.Ор1 И 1 БПС Г .:эЕИ 1 Е 11 БЛ:С 1 ,-,ОПИСАНИЕ ИЗОБРЕТЕНИЯН А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ чной мехазкочастотные оды и сред- стандартов,1(54) УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ ДВИЖЕНИЯ(57) Изобретение относится к метрологии измерений параметров движения. Цель изобретения - расширение рабочего диапазона градуировки, Пластинку 2 со спиралевидным профилем рабочей поверхности устанавливают на вращающейся платформе. Градуируемый преобразователь с помощью рычага (нежесткой связи) соединяется с рабочей поверхностью пластинки 2, При вращении пластинки 2 вокруг оси воспроизводится тестовый сигнал заданной формы, амплитуды и частоты, Тиражировать пластинки 1 можно с одной и той же матрицы. Соединение нежесткой связью градуируемого преобразователя с поверхностью пластинки 1 можно осуществлять посредством обычной корундовой иглы. 1 ил.Изобретение относится к измерительной технике и может быть использовано при метрологическом обеспечении линейных и угловых акселерометров, тахометров, виброметров, велосиметров, средств измерения неравномерности вращения и других средств измерения параметров движения.Целью изобретения является расширение рабочего диапазона градуировки.На чертеже схематически представлено устройство для градуировки измерителей параметров движения.Устройство содержит средство воспроизведения параметров движения в виде привода (не показан) с вертикальной осью вращения с закрепленной по его валу платформой 1, на которой расположен горизонтально диск (или пластинка) 2 с возможностью взаимодействия его рабочей поверхности с узлом съема сигнала в виде платформы 3 с двумя степенями свободы, градуируемый измеритель 4, звукосъемное устройство 5 (например, с использованием корундовой иглы), регистрирующее устройство 6 (например, графопостроитель). Рабочая поверхность диска выполнена спиралевидной. Устройство работает следующим образом.Сначала методами, принятыми в техникезвукозаписи, изготавливают матрицу с заданным профилем. Профиль образует две спиралевидные канавки. Одна из них (основная) предназначена для задания платфор ме с двумя степенями движения по заданному закону,Вторая канавка служит для измерения.угла поворота платформы с одной степенью свободы. Она выполнены обычным образом (например, в виде спирали Архимеда) и несет запись в виде электрических импульсов с постоянным периодом следования или кодов углового положения.С помощью единой матрицы с заданнымпрофилем эталонной поверхности формируют пластинки по числу потребителей рабочих средств измерений, Таким образом,все пластинки по своему профилю оказываются идентичными матрице, что приводит кединству измерения. Матрицу в свою оче,редь подвергают тщательному метрологическому исследованию.Затем пластинка 2 поступает к потребителю и устанавливается на платформе 1с вертикальной осью вращения. Платформас двумя степенями свободы 3 выполнена ввиде рычага,Далее платформу 3 соединяют пластинкой 2, установленной на платформе 1 нежесткой связью, например, посредством корундовой иглы, как это сделано в механизме звукоснимателя.При этом используют основную канавкупластинки 2. На платформе 1 установлен градуируемый измеритель 4, сигнал которого поступает в регистрирующее устройство 6, В это же устройство поступает сигнал звукоснимателя, головка которого установлена на дополнительной дорожке. Г 1 ри вращении платформы 1 с постоянной скоростью аа платформа 3 поворачивается с малой скоростью о в горизонтальной плоскости. Оценим эту скорость.Предположим, что расстояние между собой (длина рычага) обеих платформ равно 1. и радиус основной канавки г зависит от угла р поворота платформы 1 следующим образом:15г= - ср,2 Л где 6 - расстояние между спиралями.Тогда при достаточной длине 1. упомянутого рычага платформы 3 игла движется 20 практически по радиусу платформы 1. Вэтом случае, как следует из (1), максимальная линейная скорость Ч (в точке соединенияплатформы) будет Ч - аа, соответственно 25угловую скорость а поворота платформы 3с достаточной точностью можно записатьЬследующим образом: ь= -ьо. Пусть й=2 л 1. ЗО -- 100 мкм, 1.=1 м, тогда 7=2.10 м/с,со == 2 10,в, рад/с. Таким образом, за счет выбора 1, щ. и 1. линейная и угловая скоростиплатформы 3 могут быть получены достаточно малыми.11 редположим, что радиус спиральной каЗ 5 навки зависит от угла поворота платформы 1 по квадратичному законуг= К, (2)где К - коэффициент.Тогда при вращении платформы 1 с по.стоянной скоростью ас имеем р=ао 1 и уг О ловое ускорение платформы 1 практическипостоянно и согласно (2) равноЬо, 2 КЕ= - т = - Щ2 л-,1. 1.(3)Линейное ускорение платформы 3 в гочке 45 ее соединения с платформой 2 записываемв видеа. - 2 Ка), (4)Варьируя К за счет изменения профиляматрицы, можно изменять воспроизводимое ускорение. Данное ускорение удобно опреде лить через число оборотов и пластинки,совершаемых за время воспроизведения ускорения.Из (2) следуетК.2 лп55где К - радиус пластинки.Пусть п=0,5 об., К=О, м, 1.=1 м, ам==33 об/мин, Тогда, согласно (3) и (4), можно оценить постоянные ускорения, которые1483383 Формула изобретения 30 Составитель 1 О. ВласовРедактор Н. Горват Техред И. Верес Корректор Э. ЛонпаковаЗаказ 2826/43 Тираж 789 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж - 35, Раушская наб., д. 45Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101 можно поддерживать в течение 1 с: в= =0,6 рад/с,а=0,6 м/с. В течение 0 с можно поддерживать в 1 О раз меньшие ускорения, а в течение 0,3 с - в 3 раза большие.Предположим, что радиус канавки зависит от угла поворота платформы следующим образом:Г= ГО+ ГЗПГР, (5) где го, г - постоянные величины.В данном случае воспроизводимые платформой 1 перемещения, скорости и ускорения (угловые и линейные) будут изменяться по гармоническому закону. Частотный диапазон в данном случае составляет доли и единицы Гц, Для расширения частотного диапазона можно использовать обычную звуковую запись гармонических сигналов разных частот (реально до 40 кГц), В этом случае платформа 3 совершает колебания в вертикальной плоскости в отличие от рассмотренных выше случаев, когда движение происходит в горизонтальной плоскости. В этом случае автоматически могут быть сняты частотные характеристики исследуемых приборов. Профили матрицы, а следовательно пластинки выполнены таким образом, что при их вращении воспроизводятся параметры движения, соответствующие всем точкам статистических характеристик (в случае постоянных скоростей и ускорений) или - частотных характеристик (в случае гармонических перемещений, скоростей ускорений).С помощью звукоснимателя 5 снимается информация об угле поворота, а следовательно, о воспроизводимых параметрах движения.Данная информация снимается с дополнительной дорожки. Таким образом, звукосниматель 5 вместе с дополнительной дорожкой представляет собой многооборотный датчик угла поворота платформы 1. Этот угол может быть измерен и другими способами, например с помощью многооборотного потенциометра или путем использования звуковой дорожки основной канавки. Сигнал звукоснимателя 5 поступает на регистрирующее устройство 6, которое представляет собой графопостроитель. При построении статистических и частотных характеристик движение по оси абсцисс осуществляется по сигналам звукоснимателя 5, движение по оси ординат - по сигналам градуируемого прибора 4.Точность устройства определяется точностью изготовления и аттестации матрицы.Аттестация матрицы осуществляется аналогично аттестации соответствующего эталона.При этом можно за счет изменения рисунка основной канавки учесть, что платформа 3 1 О в месте ее соединения с пластинкой 2 движется не по радиусу пластинки 2, а также учесть переходные процессы при переходах от точки к точке характеристик, задать другие применяемые законы, например экспоненциальные. Кроме того, возрастает точность метрологического обеспечения в диапазоне малых и сверхмалых значений параметров движения, что позволяет расширить рабочий диапазон градуировки.Преимуществом предлагаемого устрой ства является легкость автоматизации съемастатистических и частотных характеристик.Для этого достаточно, чтобы профиль пластинки позволял воспроизводить все точки этих характеристик и обеспечивал затухание переходных процессов при переходах от точки к точке. Это существенно повышает.производительность работ по метрологическому обеспечению и снижает их стоимость. Устройство для градуировки измерителейпараметров движения, содержа 1 цее средство воспроизведения параметров движения в виде привода с вертикальной осью вращения с закрепленной на его валу платформой, отличающееся тем, что, с целью расширения рабочего диапазона градуировки, средство воспроизведения снабжено задатчиком параметров движения, выполненным в виде диска со спиралевидным профилем рабочей 40 поверхности с отметками утла поворота, атакже узла съема воспроизводимой величины, при этом диск установлен на платформе с возможностью взаимодействия его рабочей поверхности с узлом съема воспроизводимой величины, механически связан ным с градуируемым измерителем.
СмотретьЗаявка
4080296, 05.05.1986
ЛЕНИНГРАДСКИЙ ИНСТИТУТ ТОЧНОЙ МЕХАНИКИ И ОПТИКИ
ИВАНОВ ВЛАДИСЛАВ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G01P 21/00
Метки: градуировки, движения, измерителей, параметров
Опубликовано: 30.05.1989
Код ссылки
<a href="https://patents.su/3-1483383-ustrojjstvo-dlya-graduirovki-izmeritelejj-parametrov-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для градуировки измерителей параметров движения</a>
Опорная платформа для измерения временных параметров прыжков

Номер патента: 617768
Опубликовано: 30.07.1978
Автор: Грукаленко
МПК: G04F 8/00
Метки: временных, опорная, параметров, платформа, прыжков
...и т. п. и диэлектрической прокладки 2, например из резины. Пластины могут быть соединены в звенья 3, а звенья в дорожку, Между верхними и нижними пластинами имеется за. зор, например в 1 - 5 мм.В случае необходимости площадь платформы может регулироваться количеством звеньев. Верхние пластины сверху для удобства отталкивания и изоляции покрыты материалом 4, например резиной. Электропроводом 5 верхние пластины звеньев и отдельно нижние соединены в дорожку. Тем самым создан нормально разомкнутый контакт с необходимой полезной площадью. Опорная платформа проводами 5 соединена с релейной цепью 6 времяизмерительного устройства 7.При напрыгивании на опорную платформу ее пластины, расположенные одна под другой, под действием веса испытуемого...
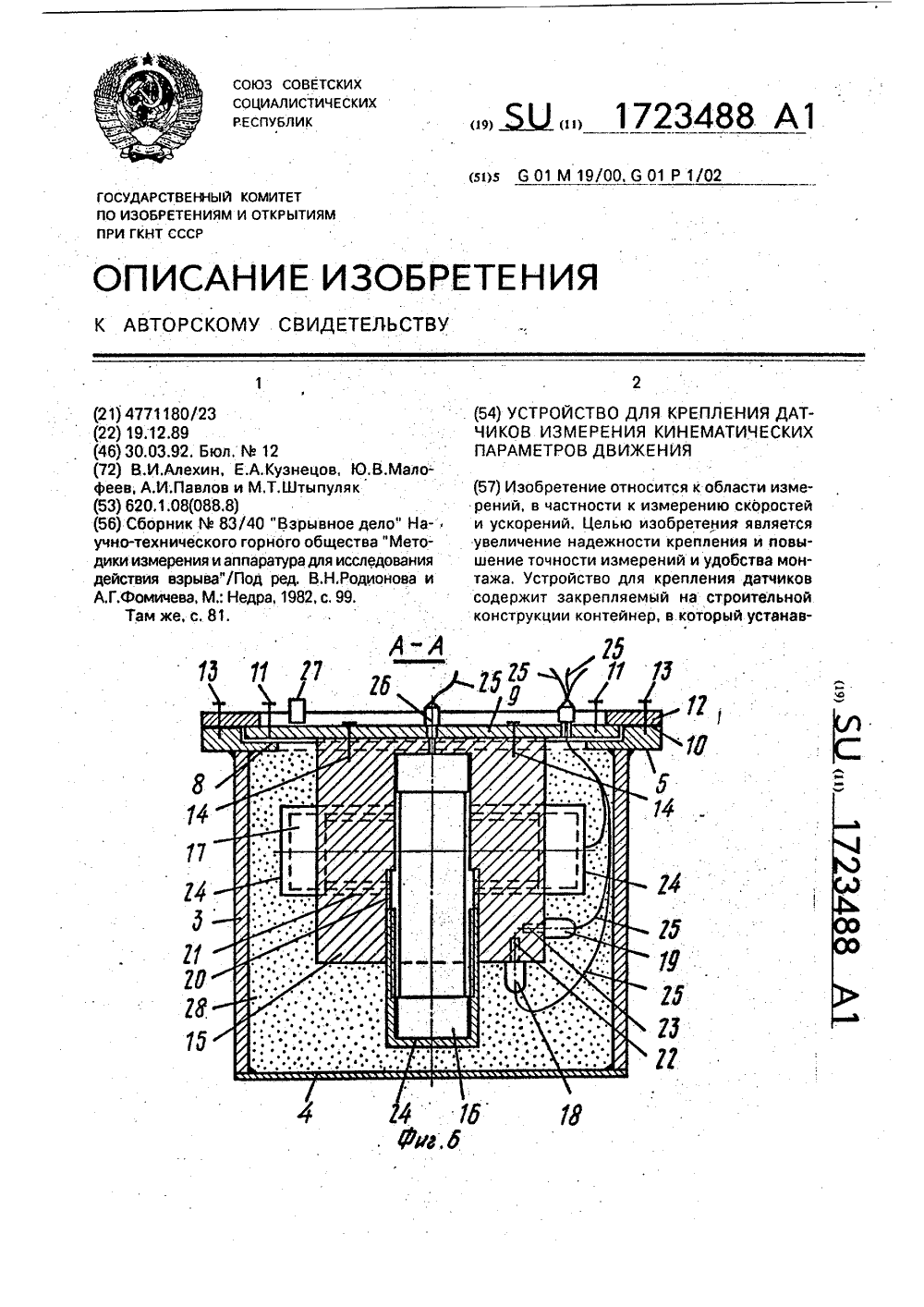
Устройство для крепления датчиков измерения кинематических параметров движения
Номер патента: 1723488
Опубликовано: 30.03.1992
Авторы: Алехин, Кузнецов, Малофеев, Павлов, Штыпуляк
МПК: G01M 19/00, G01P 1/02
Метки: датчиков, движения, кинематических, крепления, параметров
...16), В обоих вариантах дат- отверстия в зажиме, то можно использовать чик закреплен (зажат) с двух сторон, что жгут из какого-либо упругого герметика резко снижает вибрации по сравнению с (мягкой резины и т,п,) и в один зажим проконсольным вариантом и способствует су- пускать несколько проводов,щественному повышению точности измере Затем диск 9 с блоком 15 устанавливаний, Монтажные провода 25 от датчиков ется в контейнер 2 (фиг.5) блоком 15 внутрь выводятся в отверстие в гайке 24(датчик 17) контейнера, а диском 9 в уступ фланца 5 на или в отверстие в блоке 15 (датчик 16), его нижнюю ступень 8, После этого целесоДля вывода монтажных проводов 25 от образно установить прижимное кольцо 12 датчиковизконтейнера 2 вдиске 9 имеются 20...
Способ радиотехнического измерения параметров движения быстро перемещающегося объекта

Номер патента: 323754
Опубликовано: 07.03.1982
Авторы: Мировицкий, Соболев
МПК: G01S 13/58
Метки: быстро, движения, объекта, параметров, перемещающегося, радиотехнического
...в видимом диапазоне может быть использован ОКГ на ионизированном аргоне (Х 0,488 и 0,5145) или гелий-неоновый ОКГ (Х 0,6328 мкм).Фоторегистрация осуществляется на фотопленке при помощи фотоаппарата, сфокусированного на выбранный участок траектории. Во время движения объекта затвор аппарата открывается. Поэтому перемещающийся объект экспонирует на фотоэмульсии изображение светящейся точки (или точек) в виде характерного траекторного узора.Для удобства последующей обработки в когерентной системе целесообразно моду 5 10 15 20 25 30 35 40 45 лировать затвор фотоаппарата или освещающий ОКГ, что приводит к расширенн.о пространственно-частотного спектра сигнала. При последующих фотографированиях следует сохранять относительное расположение...
Устройство для определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента

Номер патента: 1771549
Опубликовано: 30.10.1992
Авторы: Бледных, Лежников, Свечников
МПК: A01B 17/00
Метки: движения, пласта, плоскорежущего, поверхности, почвы, траектории, элемента, элементов
...образам.При продвижении трехгранного клина впочве пласт (фиг,2) движется по траекторииАБ ладуглам(гг) клезвиа пластины, тоестьтрехгранный клин как бы раздвигает ло ау,в то же время за счет изгиба пласта производит крашение, При прохождении клина звним ааразуется развальная борозда за счетперемещения почвы от носка клина к пяткам, Заляер угла производится за счет перемещения меченога точечного предмета(войлока) расположенного на поверхностипочвы у носка лри помощи пластины 6 снанесенной на ней градусной сеткой,Угол гг, лри известных параметрах клина к и у, можем определить через уголгг г па выракенигсат 9 гг -)-(1)где гг г-угол между проекцией направлениядвижения почвы по клину на плоскость АВОи направлением движения...
Способ определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента и устройство для его осуществления

Номер патента: 1813316
Опубликовано: 07.05.1993
Авторы: Бледных, Лежников, Свечников
МПК: A01B 17/00
Метки: движения, пласта, плоскорежущего, поверхности, почвы, траектории, элемента, элементов
...(оргстекла), На про 35 дальной оси пластины б выполнены 2 отверстия (позиции не показаны). между нимивыполнен вырез в виде градуированнойшкалы 10, в которые вставлены остроконеч 40ные стержни, один из которых 9 закреплен0 жестко, второй 11 соединяет измерительную пластину б с маятниковой пластиной 12с возможностью вращения маятниковойпластины 12 относительно оси, совпадаю 45щей с осью остроконечного стержня 11. Напротивоположном конце маятниковой пластины 12.жестко закреплен остроконечныйстержень 13, проходящий сквозь отверстие10 с градуированной шкалой в измерительной пластине 6.Пример определения относительнойтраектории движения пласта почвы с помощью предлагаемого метода,Перед определением относительной55траектории движения...
Предыдущий патент: Акселерометр
Следующий патент: Вращающий элемент индукционного счетчика электрической энергии
Случайный патент: Устройство для коррекции шкалы времени