Сигнализатор уровня нагретых и охлажденных сред в резервуарах
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1691688
Автор: Рачков

Текст
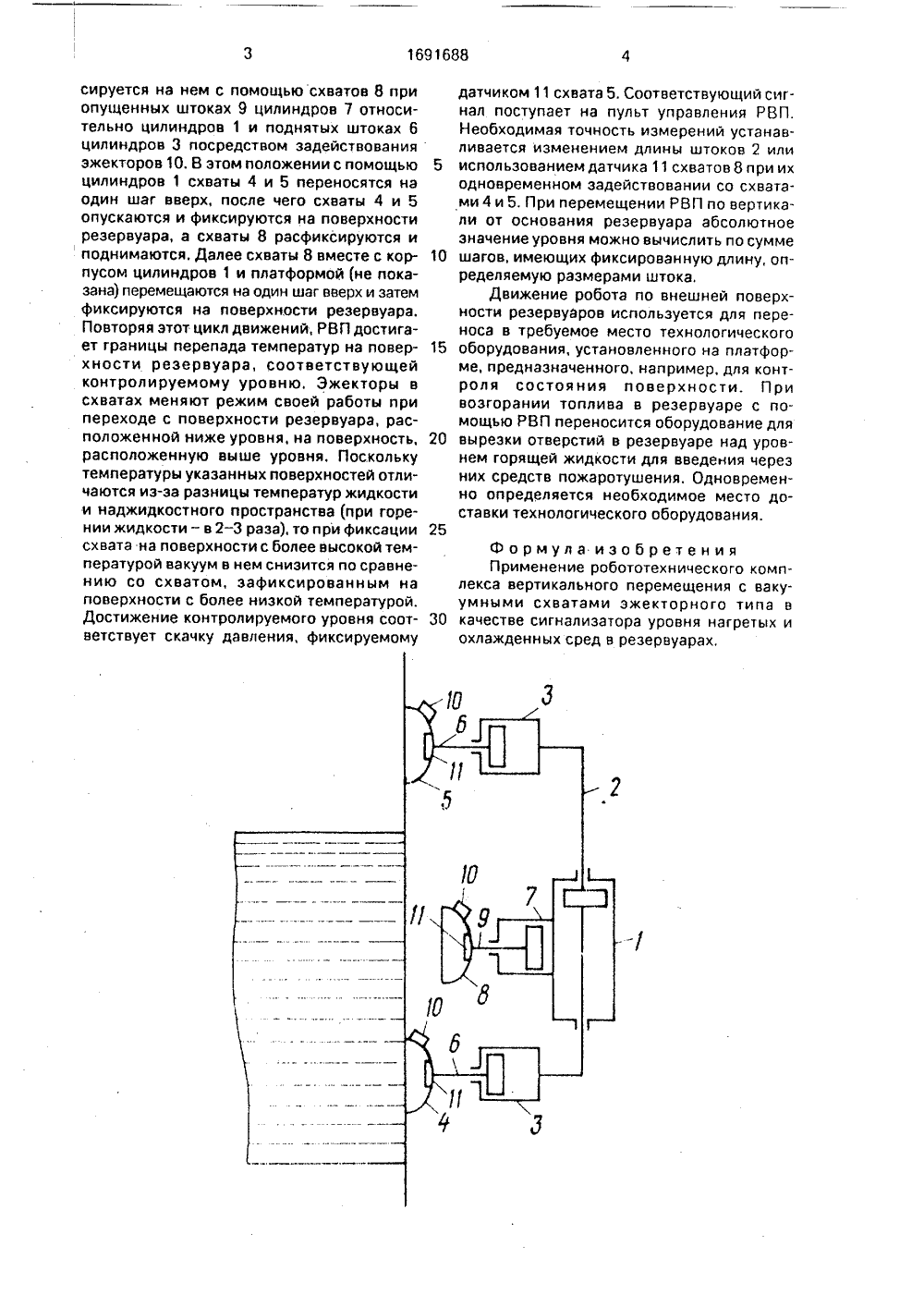
%42лем механики АН СС пробков088.8)ская киб тика, 1988, М 4,НАГРЕТЫХ ЗЕРВУАРАХ риборостроно, в частноя горящего вопожарных воэможность те ГОСУДАРСТВЕ ННЫЙ КОМИТЕТПО ИЭОБРГТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(54) СИГНАЛИЗАТОР УРОВН И ОХЛАЖДЕННЫХ СРЕД В РЕ (57) Изобретение относится к ению и может быть использов сти, для определения уров топлива при проведении прот операций. Цель изобретения -Изобретение относится к приборостроению и может быть использовано, в частности, для определения уровня горящего топлива в емкости при проведении противопожарных операций,Цель изобретения - возможность сигнализации уровня жидкости при проведении автоматизированных работ на внешней поверхности резервуаров,Сущность изобретения поясняется чертежом, на котором схематически изображен сигнализатор уровня.Устройство представляет собой роботохнический комплекс вертикального перемещения с вакуумными схватами. эжекторного типа, состоящий из робота вертикального перемещения (РВП) и пульта управления. РВП содержит подвижную платформу, жестко скрепленную с двумя пневматическими цилиндрами 1, штоки оперативного определения уровня жидкости при проведении работ на внешней поверхности резервуаров, При наличии резкого перепада температур на границе сред в качестве измерителя уровня применяется робототехнический комплекс вертикального перемещения с вакуумными схватами эжекторного типа. При перемещении схвата 5 на участок поверхности с более высокой температурой в нем возника. ет скачок давления, который фиксируется датчиком давления 11. Если отсутствует визуальный контроль положения робота, урсвень определяется по числу шагов, которые имеют фиксированную длину, определяемую размером штока 2. 1 ил. поршней 2 которых связаны с пневматическими цилиндрами 3 привсвных механизмов первой группы вакуумных схватов. Схваты 4, 5 крепятся на штоках поршней 6, К подвижной платформе крепятся пневматические цилиндры 7 второй группы схватов, удерживающих платформу на вертикальной поверхности. Схваты 8 крепятся на опорах, соединенных со штоками поршней 9. Количество вакуумных схватов первой и второй групп может быть одинаковым или различным, Вакуум в схватах создается с помощью эжекторов 10 и контролируется посредством датчиков 11. РВП соединен с пультом управления (не показан).Устройство работает следующим образом.РВП устанавливается у основания резервуара в вертикальном положении и фик.сируется на нем с помощью схватов 8 при опущенных штоках 9 цилиндров 7 относительно цилиндров 1 и поднятых штоках 6 цилиндров 3 посредством задействования эжекторов 10, В этом положении с помощью 5 цилиндров 1 схваты 4 и 5 переносятся на один шаг вверх, после чего схваты 4 и 5 опускаются и фиксируются на поверхности резервуара, а схвати 8 расфиксируются иподнимаются. Далее схваты 8 вместе с кор пусом цилиндров 1 и платформой (не показана) перемещаются на один шаг вверх и затем фиксируются на поверхности резервуара. Повторяя этот цикл движений, РВП достигает границы перепада температур на повер хности резервуара, соответствующей контролируемому уровню. Эжекторы в схватах меняют режим своей работы при переходе с поверхности резервуара, расположенной ниже уровня, на поверхность, 20 расположенную выше уровня. Поскольку температуры указанных поверхностей отличаются из-за разницы температур жидкости и наджидкостного пространства (при горении жидкости - в 2 - 3 раза), то при фиксации 25 схвата на поверхности с более высокой температурой вакуум в нем снизится по сравнению со схватом, зафиксированным на поверхности с более низкой температурой.Достижение контролируемого уровня соот ветствует скачку давления, фиксируемому датчиком 11 схвата 5. Соответствующий сигнал поступает на пульт управления РВП, Необходимая точность измерений устанавливается изменением длины штоков 2 или использованием датчика 11 схватов 8 при их одновременном задействовании со схватами 4 и 5, При перемещении РВП по вертикали от основания резервуара абсолютное значение уровня можно вычислить по сумме шагов, имеющих фиксированную длину, определяемую размерами штока,Движение робота по внешней поверхности резервуаров используется для переноса в требуемое место технологического оборудования, установленного на платформе, предназначенного, например, для контроля состояния поверхности. При возгорании топлива в резервуаре с помощью РВП переносится оборудование для вырезки отверстий в резервуаре над уровнем горящей жидкости для введения через них средств пожаротушения. Одновременно определяется необходимое место доставки технологического оборудования. Формула изобретенияПрименение робототехнического комплекса вертикального перемещения с вакуумными схватами эжекторного типа в качестве сигнализатора уровня нагретых и охлажденных сред в резервуарах.
СмотретьЗаявка
4720365, 22.06.1989
ИНСТИТУТ ПРОБЛЕМ МЕХАНИКИ АН СССР
РАЧКОВ МИХАИЛ ЮРЬЕВИЧ
МПК / Метки
МПК: G01F 23/14, G01F 23/22
Метки: нагретых, охлажденных, резервуарах, сигнализатор, сред, уровня
Опубликовано: 15.11.1991
Код ссылки
<a href="https://patents.su/2-1691688-signalizator-urovnya-nagretykh-i-okhlazhdennykh-sred-v-rezervuarakh.html" target="_blank" rel="follow" title="База патентов СССР">Сигнализатор уровня нагретых и охлажденных сред в резервуарах</a>
Способ защиты внутренней поверхности днища резервуара от коррозии
Номер патента: 1433079
Опубликовано: 30.12.1994
Авторы: Даутов, Загиров, Магалимов
МПК: C23F 11/04
Метки: внутренней, днища, защиты, коррозии, поверхности, резервуара
1. СПОСОБ ЗАЩИТЫ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДНИЩА РЕЗЕРВУАРА ОТ КОРРОЗИИ, включающий введение раствора ингибитора коррозии в углеводородную жидкость, отличающийся тем, что, с целью повышения эффективности защиты, раствор ингибитора, обладающего свойствами эмульгатора, вводят в виде обратной эмульсии в воду, плотность которой выше плотности водной фазы в резервуаре, и наносят на днище в виде свободного слоя.2. Способ по п.1, отличающийся тем, что, с целью защиты от коррозии в резервуарах с малым уровнем воды, между эмульсией и углеводородной жидкостью размещают буферный слой воды.
Устройство для наблюдения за уровнем воды в резервуарах и бассейнах

Номер патента: 16562
Опубликовано: 31.08.1930
Автор: Васк
МПК: G01F 23/04
Метки: бассейнах, воды, наблюдения, резервуарах, уровнем
...изолированных друг от друга опускаемых в воду резервуара металлических электрических проводов, включенных в сигнальную цепь и расположенных один по отношению другого подострым углом, из каковых проводников проводник 1 выполнен в виде каркаса, на котором укреплены изоляторы 2, 3,4, поддерживающие второй проводник. Для наблюдения за уровнем водыв резервуарах и бассейнах предлагается устройство, изображенное на чертеже и состоящее из двух, расположенных один по отношению другого под острым углом и изолированных друг от друга проводников 1 и 5, из которых провод,ник 1 выполнен в вйде каркаса, на котором укреплены изоляторы 2, 3, 4, поддерживающие проводник 5. Оба проводника 1 и 5 включены в электрическую сигнальную цепь, состоящую из...
Установка для очистки и металлизации внутренней поверхности цилиндрических резервуаров

Номер патента: 120742
Опубликовано: 01.01.1959
Автор: Финкельштейн
МПК: B24C 3/16
Метки: внутренней, металлизации, поверхности, резервуаров, цилиндрических
...вводят через технологическое отверстие в днище внутрь обрабатываемого резервуара, причем штанга 7 несет приборы для обработки внутренней цилиндрической поверхности резервуара, а штанга 8 - приборы для обработки внутренней поверхности днищ.На штангу 7 надето два поводка 9, состоящих из втулок, с прикрепленными к ним и направленными вниз стержнями, имеющими на концах крепления для шлангов с пескоструйными соплами 10 или заменяющими их металлизаторами с катушками,Поводки соединены между собой тросиком 11, продетым через блок 12 на катушке привода и медленно передвигаются вдоль резервуара таким образом, что один из них перемещается вдоль первой половины, а второй - вдоль второй половины днища резервуара, Совмещение такого...
Устройство телевизионного контроля внутренней поверхности цилиндрического резервуара

Номер патента: 1063297
Опубликовано: 23.12.1983
Автор: Жорж
МПК: H04N 5/26
Метки: внутренней, поверхности, резервуара, телевизионного, цилиндрического
...причем второй конец гибкого шланга расположен внутри жесткой трубчатой направляющей и выведен наружу через механизм управления.Узел центрирования содержит рычаги, преимущественно три, три штока, трубчатую деталь с фланцем в верхней части, внутри которой расположен гибкий шланг с возможностьюпродольного перемещения, при этом один из концов каждого рычага снабжен роликом, а другой шарнирно соединен с трубчатым кронштейном, каждый шток соединен шарнирно с рычагом одним концом, а другим концом - с Фланцем трубчатой детали, причем второй конец жесткой трубчатой направляющей снабжен крючками,к которым прикреплен трос управле-ния, связанный с рукояткой управления, расположенной на внешнейстороне опорного каркаса.Гибкий шланг выполнен из...
Прибор для очистки от наработка нижней части цилиндров вертикальной паровой машины

Номер патента: 29114
Опубликовано: 31.01.1933
Автор: Кулон
МПК: B24B 5/08
Метки: вертикальной, наработка, нижней, паровой, прибор, цилиндров, части
...шлифовального круга 1 применена перемещаемая от руки клиновая часть 8, предназначенная для воспроизведения упругого изгиба, несущего шлифовальный круг 1 шпинделя 2 путем радиального перемещения его опоры 9. Изобретение относится к таким приборам для очисткивнутренних стенок ци.линдров, в которых инструмент, монтируемый на штоке цилиндра, имеет планетное движение, т.-е., вращаясь вокругсвоей оси, перемещается. по окружностицилиндра, В виду специального назначения .предлагаемого прибора - очисткитолько нижней части цилиндров от образующегося там наработка, шлифовальныйкруг,.укрепленный на врашающемся упругом шпинделе прибора, имеет незначительную подачув радиальном направлении,производимую изгибом шпинделя клиновой частью, передвигаемой...
Предыдущий патент: Турбинный датчик расхода
Следующий патент: Устройство для взвешивания движущихся объектов
Случайный патент: Быстроразъемная муфта для разборных трубопроводов