Способ программного управления очистным комбайном, работающим со става конвейера, и система программного управления очистным комбайном
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1236103
Авторы: Котлярский, Резников, Силаев, Старосельский, Фрегер, Шалагин


Текст
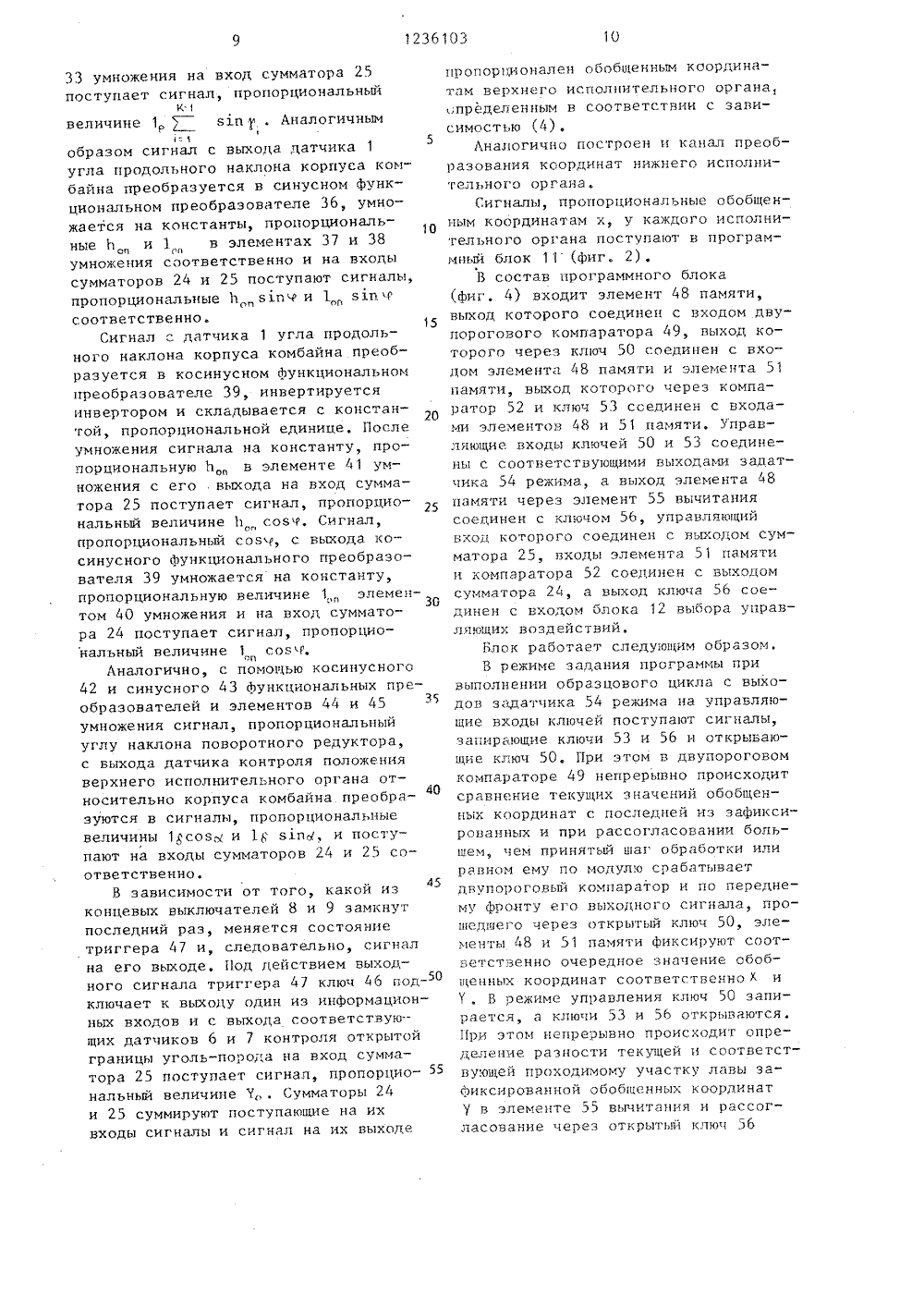
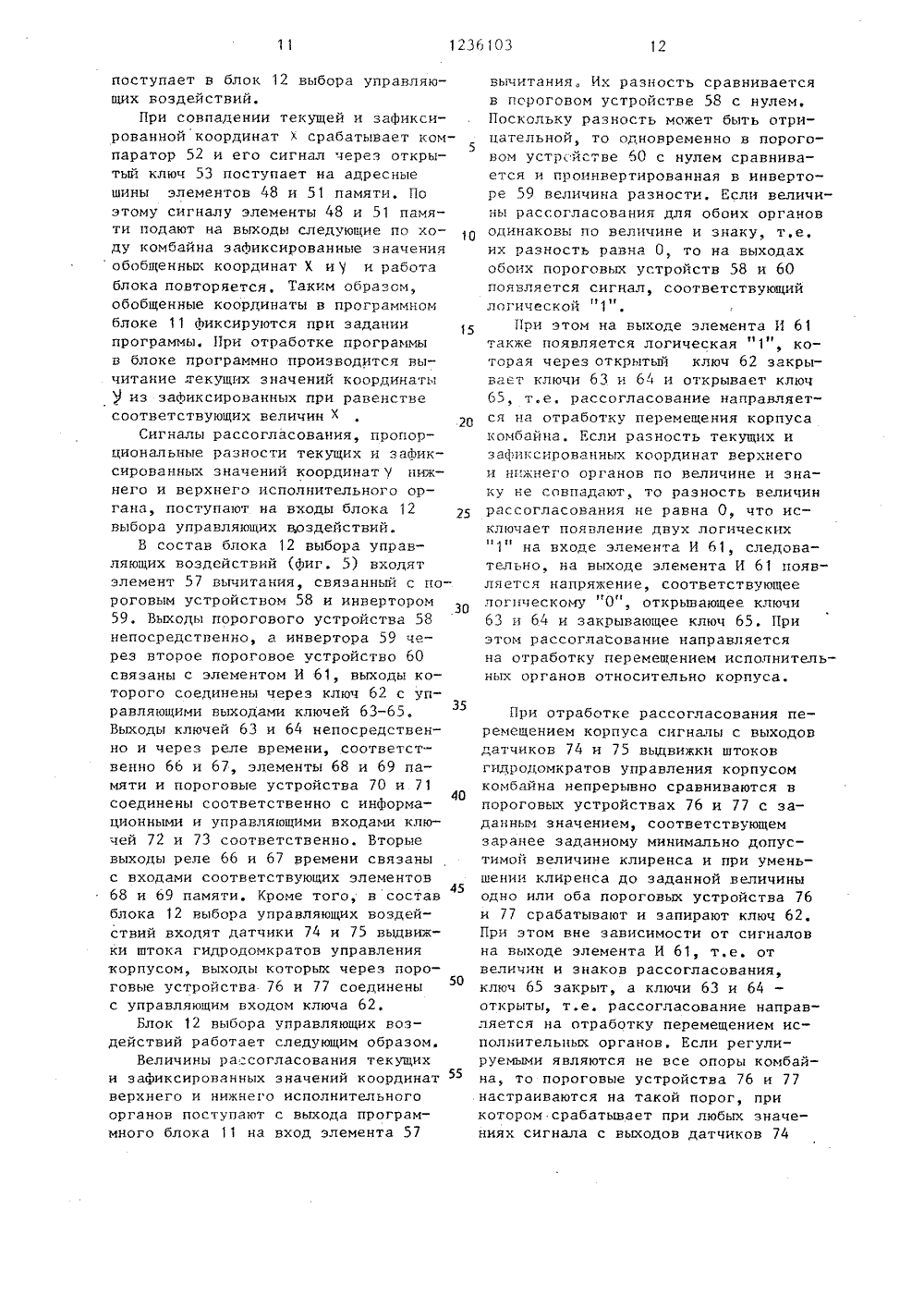
,12361 511 4 Е 21 С 35/24 Ф,рр ПИСАНИЕ РЕТ ПЬСТВ и разцое зна- бщенполнительныхссогласооложение тя бы о тольк испол щения и ительно орпуса комбаотя бы одниманов крайнеголожения,к о корпус носител 1о обтличщенные к Способ пой с я тем,щди нов очист ьных ты исполниткомбайна о соотв деляю тью зависимосК.13 к созЫ+ с ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(7 1) Московский ордена ТрудовогоКрасного Знамени горный институт(54) СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯОЧИСТНЫМ КОМБАЙНОМ, РАБОТАЮЩИМ СОСТАВА КОНВЕЙЕРАИ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ОЧИСТНЫМ КОМБАЙНОМ(57) 1. Способ программного управления очистным комбайном, работающимсо става конвейера, включающий измерение угла продольного наклона корпуса комбайна, пути, пройденного комбайном, и управление корпусом комбайна, о т л и ч а ю щ и й с я тем,что, с целью повышения точности управления за счет автоматической компенсации подштыбовки конвейера, распознавания и парирования отказов электрогидропривода перемещенияисполнительных органов относительнокорпуса и рационального выбора управляющих воздействий, предварительнозадают минимально допустимую величину клиренса комбайна, измеряют положение измерительных органов относительно корпуса комбайна, угол продольного наклона и путь, пройденныйпо конвейеру одной из опор комбайна,а на концах конвейера - расстояние от нижней полки конвейера до почвы пласта, запоминают обобщенные коорд наты исполнительных органов об ього цикла, преобразуют текущи чения измеренных величин в обо ные координаты исполнительных органов, определяют разность между ними и выбирают управляющие воздействия;если все опоры комбайна регулируемые, а величины и знаки рассогласований текущих и запомненных обобщенных координат всех ис органов идентичны, то равание отрабатывают перемещением корпуса комбайнаесли указанные условия не выполняются либо при изменении положения корпуса клиренс уменьшается до минимально допустимой величины, ранее заданной, то рассогласование отрабатывают перемещением исполнительного органа относительно корпуса комбайн и изменяют и корп при отказе хо диого нительных элементов перем полнительных органов отно ина или по достижен из исполнительных овертикальная обобщенная координата исполнительного органа;горизонтальная обобщеннаякоордината исполнительногооргана,расстояние от нижней полкиконвейера до почвы пласта втом из сопряжений лавы сштоком, откуда было начатодвижение,длина рештака скребковогоконвейера;путь, пройденный опорой порештаку, на котором она находится,угол продольного наклона рештака конвейера, равный углунаклона опоры;углы наклона каждого иэ ранее пройденных рештаков;длина проекции на ось, параллельную корпусу комбайна,расстояния между опорой, положение которой контролируется, и геометрическим центром опоры поворотного редуктора соответствующего исполнительного органа,длина проекции на ось, перпендикулярную корпусу комбайна, расстояние между опорой,положение которой контролируется, и геометрическими центрами опор редукторов;угол продольного наклона корпуса комбайна;угол отклонения от горизонтали прямой, :. соединяющейгеометрические центры исполнительного органа и опоры поворотного редуктора,1Изобретение относится к автоматическому управлению горными машинами и может быть использовано для автоматизации очистких комбайнов.Цель изобретения - повьппение точности управления за счет автоматической компенсации подштыбовки конвейера, распознавания и парирования- длина прямой, соединяющейгеометрические центры исполнительного органа и опорыповоротного редуктора3. Система программного управления очистным комбайном, работающим со става конвейера, содержащая программный блок, датчик угла наклона корпуса комбайна, датчик пути, пройденного комбайном, блоки формирования управляющих сигналов и исполнительные элементы перемещения корпуса комбайна, о т л и ч а ю щ а я с я тем, что она снабжена блоком преобразования координат, датчиком угла наклона одной из опор комбайна, датчиками положения исполнительных органов относительно корпуса комбайна, блоком выбора управляющих воздействий, исполнительными элементами перемещения исполнительных органон относительно корпуса комбайна, двумя датчиками контроля скрытой границы уголь-порода, двумя концевыми выключателями, при этом датчик пути, пройденного комбайном, укреплен на той же опоре, что и датчик угла наклона, два датчика контроля скрытой границы уголь- порода и концевые выключатели расположены по концам конвейера, выходы всех датчиков связаны с входами блока преобразования координат, выходы которого соединены с входами программного блока, выходы которого соединены с входами блока выбора управляющих воздействий соответствующие выходы которого соединены с входами блоков формирования управляющих сигналов, выходы которых подключены к соответствующим исполнительным элементам отказов электрогидропривода перемещения исполнительных органов относительно корпуса и рационального выбора управляющих воздействий,5 Иа фиг, 1 приведено схематическоеизображение участка конвейерного става и очистного комбайна; на фиг, 2 - блок схема предлагаемой системы уп+ я 1 п рс)1СК Е Р где Хо и у координаты опоры принятой в качестве центра подвижной системы координат. Хоп оп(3) где Хоае.Соп рео,35 АХ с 111 с - созе) Й 1 д ар 1 Оа-- я 2.п 1,с д 1 Ес 1 д 1 40 оП РЕ оП РЕо 3 1236равления, на фиг, 3 - функциональнаясхема блока преобразования координатна фиг, 4 - функциональная схемапрограммного блока; на фиг. 5 - функциональная схема блока выбора управ 5ляющих воздействий,Положение исполнительного органаочистного комбайна относительно условно неподвижной точки отсчета определяется положением исполнительного 10органа относительно корпуса комбайна, положением корпуса комбайна относительно одной из его опор, принятой за центр подвижной системы координат и положением указанной опорыотносительно условно неподвижнойточки отсчета,Выбор в качестве центра подвижнойсистемы координат опоры комбайна 20объясняется тем, что траектория движения опоры однозначно определяетсярельефом и, следовательно, просуммировав все векторы перемешений опорыв процессе ее движения, можно опре делить ее положение относительно места начала движения, т,е. в интересующем на случае относительно условно неподвижной точки отсчета в местесопряжения лавы со штреком. Движение 30 опоры, рассматриваемой как материальная точка, описывается для общегослучая движения по произвольному рельефу следующими дифференциальными уравнениями: с 21)сгде -- скаляр скорости движенияд 1опоры,7(С) - угол наклона вектора скорости опоры. При перемещении комбайна по рештакам скребкового конвейера 1(С) = сопя в пределах рештака и равен, 50 если пренебречь перемещением и деформацией последнего под действием веса комбайна и усилий резания и подачи, углу наклона соответствующего рештака, Осуществив тождественные преобра зования уравнений (1) ипроинтегрировав их по участкам, соответствующим рештакам, получают 2 аХ = соя 11, с 11 + соя 1, Й 1, +С -1)Е+Е)К 1) ) Кк К1 к 21 (к.1)РР2 руо= я 1 оу ) 61 + 1 п ) ПоГа К Х, = 1соя ). +:1-соя 1Р К к (21:1К У,= 1 РЕ:я 1 п + 1 я 1 пУ,Тогда обобщенные координаты исполнительных органов определяются следующей зависимостью: координаты геометрического центра опорыповоротного редукторав подвижной системекоординат проекции на соответстствующие оси подвижной системы координат прямой, соединяющей геометрические центры опоры поворотного редуктора и исполнительного органа,как видно из схематического изображениякомбайна (фиг. 1) являются проекциями насоответствующие осиподвижной системы координат прямой, соединяющей опору комбайна,выбранную в качествецентра подвижной системы координат, и геометрический центр поворотного редуктора.+ 1 сая у - и я 1 п, + 1 соя (к) 45 где У вертикальная обобщенная коордицата исполкительнога органа,горизонтальная обобщенная координата исполнительного50 органа;расстояние от нижней полки конвейера да почвы пласта втом из сопряжений лавы саштреком, где начато движениекомбайна;длина рею гака скребкового конвейера,Для упрощения учета изменения клиренса при подвеске комбайна с регулируемыми опорами и упрощения использования технической документации накомбайны при реализации системы указанную прямую последонателько проецируют на продольную и вертикальныеоси комбайна, смещают проекции кцентру подвижной системы координат,используя плоскопараллельное их перемещение, и проецируют на соответствующие оси подвижной системы координат. Нахождение Х, и У сводится к последовательному решениюдвух прямоугольных треугольников(фиг,. 1) .Носле подстановки в зависимостиУ , определенных как показано, иХ, У из соотношений (2), а такжегрибавив к координате У величинуУ, для компенсации изменения падштыбовки рештака, на котором выбираетсяусловно поднижкая тока, получают соотношение н соответствии с которымпроизводится преобразование координат в обобщенные координаты исполнительных срганон и условно неподвижной системе координат,Таким образом, обобщенные координаты цижнего и верхнего исполнительных оргацов очистного комбайна могутопределяться в соответствии с зависимостьюпуть, пройденный опорой по рештаку на катаром ока находится,угол продольного наклона рештака конвейера, равный углу наклона опорыуглы наклона каждого из ранее пройденных рештакав, проекция на ась, параллельную корпусу комбайна расстояние между опорой, положение которой контролируется и геометргг геским центром опорыповаротчого редуктора, соответствующего испалнительнага органа,проекция на ось, перпендикулярную корпусу комбайна расстояние между опорой, положение которой контролируется и геометрическими центрами опор поворотных редукторов; угол продольного наклона корпуса комбайна;угол отклонения ат горизонтальной прямой, соединяющей геометрические центры исполнительного органа и опоры наворотного редуктора; длина прямой, соединяющей геометрические центры исполнительнага органа и опоры паворотного редуктора.В состав системы праграммногс управления (фиг. 2) входят датчик 1 угла наклона корпуса комбайна, датчик 2 угла наклсца одной из опор комбайна, датчики 3 и 4 положения исполнительных органов относительно корпуса комбайна, датчик 5 пу;и, пройденного комбайном, Эти датчики расположены на комбайке, Датчики б и 7контроля скрытой границы уголь-парада и концевые выключатели 8 и 9 расположены па концам скребковаго конвейера. Выходы датчиков 1-9 связаны с входом блока 10 преобразования координат. Выход блока 10 преобразования координат через программцьгй блок 11 связан с входом блока 12 выбора управляющих воздействий. Выходы блока 12 управляющих воздействий через соответствующие блоки 13-16 оармиранация управляющих сигналов связаныс входами исполнительных элек 1 ектон17-20.Система работает следующим абразом.Во время движения очистного комбайна сигналы с выходов датчиков 1-9 поступают на вход блока 10 преобразования координат,5В состав блока 10 преобразования координат (фиг. 3) входят счетчик 21, выход которого связан через элементы 22 и 23 умножения с входами сумматоров 24 и 25, Второй выход10с счетчика через ключи 26 и 27 соответственно сумматоры 28 и 29, элементы 30 и 31 памяти и элементы 32 и 33умножения связаны с входами сумматоров 24 и 25. Вторые входы сумматоров28 и 29 связаны соответственно с выходами элементов 30 и 31 памяти, Информационный вход ключа 26 и второйвход элемента 22 умножения связаныс выходами синусного Функциональногопреобразователя 34. Информационныйвход ключа 27 и второй вход элемента 23 умножения связаны с выходомкосинусного функционального преобразователя 35, Выход второго синусного Функционального преобразователя36 через соответствующие элементы37 и 38 умножения связаны с входамисумматоров 24 и 25 соответственно.Выход второго косинусного преобразователя 39 через элемент 40 умножения связан с входом сумматора 24,а через элемент 41 умножения - с входом сумматора 25, Выходы третьихкосинусного функционального преобразователя 42 и синусного функциональ 35ного преобразователя 43 через соответствующие элементы 44 и 45 умножения связаны с входами сумматоров 24.и 25 соответственно,40Вход счетчика 21 (Фиг, 3) связан с выходом датчика 5 местонахождения комбайна (Фиг, 2), входы синусного и косинусного Функциональных преобразователей 34 и 35 (фиг, 3) соединены с датчиком 2 угла продольного наклона одной из опор комбайна (фиг.2), входы синусного 43 и косинусного 42 функциональных преобразователей соединены с датчиком 3 контроля положения верхнего исполнительного органа.Сумматор 25 (Фиг. 3), кроме того,связан с датчиками 6 и 7 (фиг, 2)контроля скрытой границы уголь-породачерез ключ 46, управляющий вход которого соединен с триггером 47 (фиг.З),входы которого соединены с выходамиконцевых выключателей 8 и 9. Еанал преобразователя координат верхнего исполнительного органа работает следующим образом.При перемещении опоры комбайна на заданное расстояние, определяемо принятым шагом дискретности и равное, например, О, 1 м с выхода датчика 5 пути приходит импульс и содержимое счетчика увеличивается на единицу. Содержимое счетчика 2 1 пропорциональное величине 1 в зависимости (4) поступает на вход элементов 22 и 23 умножения, На вход синусного и косинусного функциональных преобразователей 34 и 35 с выхода датчика 2 угла продольного наклона одной из опор комбайна поступает сигнал, пропорциональный величине этого углаа с их выходов сигналы, пропорциональные япЯ и сояпоступают на вторыеК .входы соответствующих блоков 22 и 23 умножения. При этом на выходах последних формируются сигналы, пропорциональнье соответственно 1, я 1 пк и 1,соя 11 . При перемещении опоры на длину, равную длине рештака скребкового конвейера, содержимое счетчика 21 обнуляется, а с его второго выхода на управляющие входы ключей 26 и 27 поступает отпирающий импульс.Через открывающиеся ключи 26 и 27 с выхода косинусного Функционального преобразователя 34 сигнал, пропорциональный соя У поступает на вход сумматора 28, где складывается с содержимым элемента 30 памяти, после чего происходит перезапись содержимого элемента 30 памяти в элемент памяти записывается результат суммирования, На выходе элемента 30 памяти,таким образом, сигнал, пропорциональК ньгй ,= соя у . Аналогично, с помощью1:1синусного Функционального преобразозателя 35, ключа 27 и сумматора 29на выходе элемента 31 памяти появляется сигнал, пропорциональный величиК. 1нея 1 пУ,1:1В элементах 32 и 33 умножения сигналы с выходов элементов 30 и 3 1 памяти соответственно умножаются наконстанту, пропорционапьную длине рештака 1 р . С выхода элемента 32 умножения на вход сумматора 24 поступает сигнал, пропорциональный величине 1 У созе, а с выхода элемента33 умножения на вход сумматора 25поступает сигнал, пропорциональныйк-величине 1 рв 1 п 1 . Аналогичньм1=15образом сигнал с выхода датчика 1угла продольного наклона корпуса ком -байна преобразуется в синусном Функциональном преобразователе 36, умножается на константы, пропорциональные Ь, и 1в элементах 37 и 38умножения соответственно и на входысумматоров 24 и 25 поступают сигналы,пропорциональные Ь з 1 пчи 1, з 1 п чсоответственно.Сигнал " датчика 1 угла продольного наклона корпуса комбайна преобразуется в косинусном Функциональномпреобразователе 39, инвертируетсяинвертором и складывается с констан 20той, пропорциональной единице, Послеумножения сигнала на константу, пропорциональную Ь, в элементе 41 умножения с его выхода на вход сумматора 25 поступает сигнал, пропорциональный величине 1 созе. Сигнал,пропорциональный сов, с выхода косинусного Функционального преобразователя 39 умножается на константу,пропорциональную величине 1, элементом 40 умножения и на вход сумматора 24 поступает сигнал, пропорциональный величине 1 сов.опАналогично, с помощью косинусного42 и синусного 43 Функциональных преобразователей и элементов 44 и 45умножения сигнал, пропорциональныйуглу наклона поворотного редуктора,с выхода датчика контроля положенияверхнего исполнительного органа относительно корпуса комбайна преобра 40зуются в сигналы, пропорциональныевеличины 1 созе и 1; з 1 п, и поступают на входы сумматоров 24 и 25 соответственно,В зависимости от того, какой изконцевых выключателей 8 и 9 замкнутпоследний раз, меняется состояниетриггера 47 и, следовательно, сигнална его выходе, Под действием выходного сигнала триггера 47 ключ 46 подключает к выходу один из информационных входов и с выхода соответствующих датчиков 6 и 7 контроля открытойграницы уголь-порода на вход сумматора 25 поступает сигнал, пропорцио-нальный величине " . Сумматоры 24и 25 суммируют поступающие на ихвходы сигналы и сигнал на их выходе проорпионален обобщенным координатам верхнего исполнительного органа, определенным в соответствии с зависимостью ,4),Анаогично построен и канал преобразования координат нижнего исполнительного органа.Сигналы, пропорциональные обобщенным координатам х, у каждого исполнительного органа поступают в программный блок 11 (Фиг. 2),В состав программного блока(фиг, 4) входит элемент 48 памяти,выход которого соединен с входом двупорогового компаратора 49, выход которого через ключ 50 соединен с входом элемента 48 памяти и элемента 51памяти, выход которого через компаратор 52 и ключ 53 сседине с входами элементов 48 и 51 памяти, Управляющие входы ключей 50 и 53 соединены с соответствующими выходами задатчика 54 режима а выход элемента 48 памяти через элемент 55 вычитания соединен с кгючом 56, управлякщий вход которого соединен с выходом сумматора 25, входы элемента 51 памяти и компаратора 52 соединен с выходом сумматора 24, а выход ключа 56 соединен с входом блока 12 выбора управляющих воздействий.Блок работает следующим образом, В режиме задания программы при выполнении образцового цикла с выходов задатчика 54 режима на управляющие входы ключей поступают сигналы, запирающие ключи 53 и 56 и открывающие ключ 50, При этом в двупороговом компараторе 49 непрерывно происходит сравнение текущих значений обобщенных координат с последней из зафиксированных и при рассогласовании больщем, чем принятый шаг обработки или равном ему по модулю срабатывает двулороговый компаратор и по переднему фронту его выходного сигнала, прошедцего через открытый ключ 50, элементы 48 и 51 памяти Фиксируют соответственно очередное значение обобщенных координат соответственно Х иВ режиме управления ключ 50 запирается, а ключи 53 и 56 открываются. При этом непрерьвно происходит определение разности текущей ц соответствующей проходимому участку лавы зафиксированной обобщенных координатв элементе 55 вычитания и рассогласование через открытый ключ 56поступает в блок 12 выбора управляющих воздействий.При совпадении текущей и зафиксированной координат Х срабатывает ком 5паратор 52 и его сигнал через открытый ключ 53 поступает на адресныешины элементов 48 и 51 памяти, Поэтому сигналу элементы 48 и 51 памяти подают на выходы следующие по ходу комбайна зафиксированные значенияобобщенных координат Х ии работаблока повторяется. Таким образом,обобщенные координаты в программномблоке 11 фиксируются при задании15программы. При отработке программыв блоке программно производится вычитание влекущих значений координатыиз зафиксированных при равенствесоответствующих величин Х20Сигналы рассогласования, пропорциональные разности текущих и зафиксированных значений координат У пжкнего и верхнего исполнительного органа, поступают на входы блока 12выбора управляющих воздействий.В состав блока 12 выбора управляющих воздействий (фиг. 5) входятэлемент 57 вычитания, связанный с пороговым устройством 58 и инвертором59, Выходы порогового устройства 58непосредственно, а инвертора 59 через второе пороговое устройство 60связаны с элементом И 61, выходы которого соединены через ключ 62 с управляющими выходами ключей 63-65.35Выходы ключей 63 и 64 непосредственно и через реле времени, соответственно 66 и 67, элементы 68 и 69 памяти и пороговые устройства 70 и 7140соединены соответственно с информационными и управляющими входами ключей 72 и 3 соответственно. Вторыевыходы реле 66 и 67 времени связаныс входами соответствующих элементов4568 и 69 памяти. Кроме того, всоставблока 12 выбора управляющих воздействий входят датчики 74 и 75 выдвижки штока гидродомкратов управлениякорпусом, выходы которых через пороговь 1 е устройства 76 и 77 соединены50с управляющим входом ключа 62,Блок 12 выбора управляющих воздействий работает следующим образом.Величины ра согласования текущихи зафиксированных значений координат 55верхнего и нижнего исполнительногоорганов поступают с выхода программного блока 11 на вход элемента 57 вычитания. Их разность сравнивается в пороговом устройстве 58 с нулем, Поскольку разность может быть отрицательной, то одновременно в пороговом устройстве 60 с нулем сравнивается и проинвертированная в инверторе 59 величина разности. Если величины рассогласования для обоих органов одинаковы по величине и знаку, т,е, их разность равна О, то на выходах обоих пороговых устройств 58 и 60 появляется сигнал, соответствующий логической "1".При этом на выходе элемента И 61 также появляется логическая 1 которая через открытый ключ 62 закрывает ключи 63 и 64 и открывает ключ 65, т.е, рассогласование направляется на отработку перемещения корпуса комбайна. Если разность текущих и зафиксированных координат верхнего и нижнего органов по величине и знаку не совпадают, то разность величин рассогласования не равна О, что исключает появление двух логических "1" на входе элемента И 61, следовательно, на выходе элемента И 61 появляется напряжение, соответствующее логическому "0, открывающее ключи 63 и 64 и закрывающее ключ 65, При этом рассогласование направляется на отработку перемещением исполнительных органов относительно корпуса. При отработке рассогласования перемещением корпуса сигналы с выходов датчиков 74 и 75 вьщвижки штоков гицродомкратов управления корпусом комбайна непрерывно сравниваются в пороговых устройствах 76 и 77 с заданным значением, соответствующем заранее заданному минимально допустимой величине клиренса и при уменьшении клиренса до заданной величины одно или оба пороговых устройства 76 и 77 срабатывают и запирают ключ 62. При этом вне зависимости от сигналов на выходе элемента И 61, т.е, от величин и знаков рассогласования, ключ 65 закрыт, а ключи 63 и 64 открыты, т.е. рассогласование направляется на отработку перемещением исполнительных органов, Если регулируемыми являются не все опоры комбайна, то пороговые устройства 76 и 77 настраиваются на такой порог, при котором срабатывает при любых значениях сигнала с выходов датчиков 74и 75 выдвижки штоков гидродомкратовуправления корпусом комбайна,При подании рассогласования наотработку перемещением исполнитель 5ных органов относительно корпуса,ключи 63 и 64 открываются и на ихвыходах появляются сигналы рассогласования. При их появлении срабатывают реле 66 и 67 времени и начинают 1 О отсчет времени, При срабатывании реле времени на элементы памяти с выхода реле времени подается синхроимпульс, при приходе которого элементы памяти фиксируют рассогласование, Пока длится отсчет времени с выходов реле 66 и 67 времени и на входы пороговых устройств 70 и 71 подается напряжение, равное нулю, рассогласования на входах каждого из реле времени 66 и 67 и выдержка времени рассчитывается так, что рассогласование за счет отработки уменьшается на величину, не меньшую, чем шаг отработки.По истечении выдержки времени ре ле 66 и 67 времени со своих выходов подают на входы соответствующих пороговых устройств суммы величины рассогласования в момент окончания выдержки времени и константы, пропорциональный шагу отработки, умноженной на знаковую функцию рассогласовния, С выхода элементов 68 и 69 памяти на вторые входы пороговых устройств 70 и 71 подаются величины рассогласования в момент начала отсчета выдержки времени. Если дополнитепьные элементы перемещения исполнительных органов относительно корпуса исп-равны и хотя один из исполнительных органов не находится в крайнем относительно корпуса положении, напряжения на выходах реле 66 и 67 времени не больше соответствующих напряжений на выходах элементов 68 и 69 памяти45 и, следовательно, на выходах пороговых устройств напряжения равны нулю, ключи 72 и 73 заперты. При невыполнении этого условия для одного или обоих реле 66 и 67 времени превышают50 соответствующие сигналы на выходах элементов 68 и 69 памяти, одно или оба пороговых устройства срабатывают и отпирают один или оба ключа 72 и 73.При этом соответствующее рассогпасование направляется отработку пе 55 ремещением корпуса комбайна независимо от клироса и введенных в пороговые устройства 76 и 77 блокировок,При поступлении с одного из выходов блока 12 выбора управляющих воздействий сигнал рассогласования на соответствующий вход блоков 13 16 формирования управляющих сигналов, которые могут быть выполнены в виде последовательного соединения ждущего мультивибратора, элемента умножения на знаковую функцию входного сигнала и усилителя мощности, в них формируются управляющие сигналы, Они могут представлять собой импульсы, длительность которых пропорциональна шагу отработки при дискретном управлении, а напряжение - напряжению срабатывания злектрогидропреобразователей. Импульсы с выходов блоков 13-16 формирования управляющих сигналов поступают на входы соответствующих исполнительных элементов 17-20.По сигналам с выходов блоков 13- 16 формирования управляющих сигналов исполнительные механизмы осушествляют перемещение исполнительных органов или корпуса комбайна,В качестве датчиков 1 и 2 угловнаклона корпуса и опоры комбайна могут применяться компенсационные емкостные измерители угла отклоненияот ьертикали и синусным выходом ианалогоцифровыми преобразователями.Аналогичные датчики, определяющиеугол наклона поворотного редуктора,могут использоваться в качестве датчиков 3 и 4 положения исполнительныхорганов, Датчик 5 пути, пройденногокомбайном, может выполняться на томже принципе, что и разработанныйдатчик контроля выдвижки штока гидроцилиндра, т,е, на базе магнитногообегающего ролика и считывающего устройства, В качестве датчиков 6 и 7контроля открытой границы уголь-порода может, например, использоватьсярадиоизотопное устройство,Блок 10 преобразования координат, программный блок 11 и блоки 13-16 формирования управляющих сигналов реализуют на операционных усилителях, например 157 серий, микросхемах 176, 561, 580, 252 и 212 серий, полевых и биполярных транзисторах, электромагнитных реле в типовом включении. На той же элементой базе реализуется блок 12 выбора управляющих воздействий. В качестве датчиков 18 и 19 вьдвижки штоков гидродомкратов в составе - блока 12 выбора управляющих воздействий могут применяться либо датчики выдвижки штоков гидродомкратов, или расходометрические с шестеренными, например, расходомерами.В качестве исполнительных элементов 17-20 может, использоваться электропривод очистного комбайна.
СмотретьЗаявка
3756202, 20.06.1984
МОСКОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ
КОТЛЯРСКИЙ АЛЕКСАНДР ИСАЕВИЧ, РЕЗНИКОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ, СИЛАЕВ ВИКТОР ИВАНОВИЧ, СТАРОСЕЛЬСКИЙ АЛЕКСАНДР ВЛАДИМИРОВИЧ, ФРЕГЕР ДАВИД ИСААКОВИЧ, ШАЛАГИН ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: E21C 35/24
Метки: комбайном, конвейера, очистным, программного, работающим, става
Опубликовано: 07.06.1986
Код ссылки
<a href="https://patents.su/10-1236103-sposob-programmnogo-upravleniya-ochistnym-kombajjnom-rabotayushhim-so-stava-konvejjera-i-sistema-programmnogo-upravleniya-ochistnym-kombajjnom.html" target="_blank" rel="follow" title="База патентов СССР">Способ программного управления очистным комбайном, работающим со става конвейера, и система программного управления очистным комбайном</a>
Аксиально-поршневая гидромашина с наклонным блоком цилиндров

Номер патента: 1481460
Опубликовано: 23.05.1989
Авторы: Караваев, Ковязин, Козлов, Син, Шубенков
МПК: F04B 1/24
Метки: аксиально-поршневая, блоком, гидромашина, наклонным, цилиндров
...блок ает с осью шатуна исферической головки дном вале 3, Коордиравнодействующей силы пределить из формулы сила 1 р 1 аждои опокоординатыры штока;радиус размвок шатуногнездах привугол поворолиндров;число поршнных с линиев период пов де Ь=К зи а, -щения гол поршнейого вала;блока циеи, соединен- и нагнетания рота вала на угол 0(а( -же, при поворотУчитывая, что среднее значение суммы х 1 фт. Х зи а)/ср= -(Х з 1 п а аа= Ж - р ото среднее значение координаты равнодействующей равно2 КЬр= --ХНаправление равнодействующей силы отжима от блока цилиндров Ротж проходит через центр сферической поверхности распределителя и с достаточной степенью точности через координату точки приложения результирующей силы отжима, действующей на торец блока...
Ограничитель угла наклона грузозахватного органа

Номер патента: 1142422
Опубликовано: 28.02.1985
МПК: B66C 15/00, B66C 23/90
Метки: грузозахватного, наклона, ограничитель, органа, угла
...приводит к задержке срабатывания из-за значительного увеличения его габаритов.Цель изобретения - расширение эксплуатационных возможностей ограничителя за счет увеличения диапазона регулирования угла наклона грузозахватного органа.Поставленная цель достигается тем, что ограничитель угла наклона грузозахватного органа, содержащий корпус, жестко закрепленный на обойме подвижного грузового полиспаста, крюк, снабженный опорным элементом и кольцом и размещенный в корпусе с возможностью вертикального перемещения относительно него, и два кольцевых соосно расположенных один над другим контакта, нижний из которых прикреплен42422 5 10 15 20 25 30 35 40 45 50 55 к днищу корпуса изолированно от нео, а верхний установлен с возможностью вертикального...
Аксиально-поршневая гидромашина с наклонным блоком цилиндров

Номер патента: 1268797
Опубликовано: 07.11.1986
Авторы: Амбарцумянц, Добринский, Ковчак, Шемпер, Эпик
МПК: F04B 1/20
Метки: аксиально-поршневая, блоком, гидромашина, наклонным, цилиндров
...втулкой 18, у которой торгивыс поверхности 9 и 20 выполнены сферическими, и упором 21, у которого нд выпуклой сферической поверхности 22 Выполнсна лиаметральная канавка 23. Сферическая поверхность 22 упора 21 взаимодействует с торсзевозй поверхностью 20 втулки 18. В распрелелителс 6 выполнена центральная полость 24 с вогнутой сферической торцовой повериостью 25, сопряженной с торцовой поверхностью 19 втулки 18. Упор 2 установлен в крышке 2 полвижно с возможностью фиксации в ней В осевом направленни с помощьк болтов 26. Центры сопряженных сферических погзерхгзосте 5 19 и 25, 20 и 22 совмегцены с центрсм наружной сферической поверцвети 7 распределителя 6 згмегоцсих радиус 1 ср. ны 9 приволят во ьраннние Б 1 Е 5, а вращение гпдйбы 4...
Аксиально-поршневая гидромашина с наклонным блоком цилиндров

Номер патента: 1408100
Опубликовано: 07.07.1988
Авторы: Караваев, Подшивалова
МПК: F04B 1/24
Метки: аксиально-поршневая, блоком, гидромашина, наклонным, цилиндров
...поверхности 9, контактирующей сцилиндром 10 блока цилиндров 5,Угол Ю, конической поверхности 7больше угла ведения о, Угол зе конической поверхности 8, расположенный ближе к сфере 9, меньше углаведения 8. Вершина усеченного конуса11 является основанием усеченногоконуса 12, образуя один диаметр Р,по которому идет контакт поршня 6 сцилиндром блока 5.Поршень 6 имеет поршневые кольца13, обеспечивающие уплотнение междуцилиндром 10 и поршнем 6, Поршни б 35установлены в сферических заделках14, связывающих приводной вал 3 споршнями 6, Блок цилиндров 5 опирается на распределитель 15.Машина работает следующим образом. 40За один оборот вала 3 поршень 6совершает один двойной ход, За первую половину оборота поршни 6 всасывают рабочую жидкость, а...
Аксиально-поршневая гидромашина с наклонным блоком цилиндров

Номер патента: 1749540
Опубликовано: 23.07.1992
Автор: Трифонов
МПК: F04B 1/24
Метки: аксиально-поршневая, блоком, гидромашина, наклонным, цилиндров
...изображен узел крепленияголовок шатунов к торцу вала,Гидромашина содержит установленные. в корпусе (не показан) наклонный блок цилиндров ( не показан), вал 1, на торце 2которого, обращенном к блоку цилиндров,расположены равномерно по окружности ив центре посадочные гнезда 3 для размещения сферических головок 4 шатунов 5 поршней (не показаны) и центрального шипа 6.Головки 4 поджаты к соответствующемугнезду 3 при помощи индивидуального длякаждой головки 4 вкладыша 7, На торце 2вала 1 концентрично относительно гнезд 3выполнены канавки 8 остроугольного профиля. На наружной поверхности 9 вкладышей 7 выполнены фаски 10. Креплениевкладышей 7 в посадочных гнездах 3 вала 1осуществляется кольцевой завальцовкой напрессе с помощью специальной...
Предыдущий патент: Устройство для управления стругом
Следующий патент: Разгрузочное устройство землеройной машины
Случайный патент: Устройство для определения рабочего слоя биметаллической магнитной ленты